You might also like
- Chương 6 - Official - EDocument94 pagesChương 6 - Official - EHuy HoangNo ratings yet
- Scaling Factors and Scaling ParametersDocument22 pagesScaling Factors and Scaling Parametersvirajitha159475% (4)
- Scaling of MOS Circuits: VLSI Design 17EC63Document22 pagesScaling of MOS Circuits: VLSI Design 17EC63Shruthi ShilluNo ratings yet
- MODULE 3 - Scaling of MOSDocument26 pagesMODULE 3 - Scaling of MOSBharath DNo ratings yet
- 1.6 Scaling PrinciplesDocument18 pages1.6 Scaling Principlessreemurarik756No ratings yet
- Vlsi Mod3 QnADocument24 pagesVlsi Mod3 QnAsri krishnaNo ratings yet
- VLSISD CDT21 Scaling2 6ECI 2021-22Document4 pagesVLSISD CDT21 Scaling2 6ECI 2021-22Poralla priyankaNo ratings yet
- Research Paper 1Document6 pagesResearch Paper 1Swati JainNo ratings yet
- Energy Efficient CMOS Microprocessor DesignDocument10 pagesEnergy Efficient CMOS Microprocessor Designnew accNo ratings yet
- Transmit Diversity in WCDMA: Link and System Level ResultsDocument6 pagesTransmit Diversity in WCDMA: Link and System Level ResultsAlan LiNo ratings yet
- Eecs311 Lab06 PDFDocument28 pagesEecs311 Lab06 PDFGwenShepherdNo ratings yet
- Design and Simulation of A Two Stage OPAMPDocument4 pagesDesign and Simulation of A Two Stage OPAMPAbd TashNo ratings yet
- Bwire Ans AssgDocument5 pagesBwire Ans AssgEria NalwasaNo ratings yet
- Flash ADCDocument15 pagesFlash ADCJagadeep KumarNo ratings yet
- Minimizing The Delay of C2mos D Flip Flop Using Logical Effort TheoryDocument3 pagesMinimizing The Delay of C2mos D Flip Flop Using Logical Effort TheorySavio SNo ratings yet
- 11 A Low-Power Single-Phase Clock MultibandDocument5 pages11 A Low-Power Single-Phase Clock MultibandDilip KumarNo ratings yet
- Optimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityDocument7 pagesOptimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityronaldomponteNo ratings yet
- Implementation and Performance Analysis of N-Way Wilkinson Power DividerDocument4 pagesImplementation and Performance Analysis of N-Way Wilkinson Power DividerkrishnakumariramNo ratings yet
- Low Power Techniques For VLSI DesignDocument6 pagesLow Power Techniques For VLSI DesignjainatinNo ratings yet
- 10bit SAR ADCDocument9 pages10bit SAR ADCKiran Kumar MandrumakaNo ratings yet
- CMOS Based 1-Bit Full Adder Cell For Low-Power Delay ProductDocument6 pagesCMOS Based 1-Bit Full Adder Cell For Low-Power Delay ProductnekuNo ratings yet
- A 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS TechnologyDocument4 pagesA 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS Technologyfaithfully_fatihNo ratings yet
- Design of An ADC Using High Precision Comparator With Time Domain Offset CancellationDocument4 pagesDesign of An ADC Using High Precision Comparator With Time Domain Offset CancellationijtetjournalNo ratings yet
- Micka El de Meuleneire, Herv e Taddei, Olivier de Z Elicourt, Dominique Pastor, Peter JaxDocument4 pagesMicka El de Meuleneire, Herv e Taddei, Olivier de Z Elicourt, Dominique Pastor, Peter JaxpavithramasiNo ratings yet
- Variations Gobal LoacalDocument11 pagesVariations Gobal LoacalPullareddy AvulaNo ratings yet
- Design of A New 3 Bit Flash Analog To DiDocument11 pagesDesign of A New 3 Bit Flash Analog To DisayemeeceNo ratings yet
- Mos Capacitances: EEE C443 Analog and Digital VLSI DesignDocument63 pagesMos Capacitances: EEE C443 Analog and Digital VLSI DesignAnurag LaddhaNo ratings yet
- 2020-Huang-A 0.07-mm2 162-mW DAC Achieving - 65Document12 pages2020-Huang-A 0.07-mm2 162-mW DAC Achieving - 65CageNo ratings yet
- Cmos Inverter As A ComparatorDocument5 pagesCmos Inverter As A ComparatorAnonymous TPVfFif6TONo ratings yet
- Module 3Document25 pagesModule 3Sushanth M100% (3)
- Low Power Implementation of A Sigma Delta Decimation Filter For Cardiac ApplicationsDocument6 pagesLow Power Implementation of A Sigma Delta Decimation Filter For Cardiac ApplicationsmikeNo ratings yet
- A DSP Implementation of OFDM Acoustic ModemDocument4 pagesA DSP Implementation of OFDM Acoustic ModemrettyrajaNo ratings yet
- Use The Process Data Given at The End of The Exam Sheet For All ProblemsDocument4 pagesUse The Process Data Given at The End of The Exam Sheet For All ProblemsBasem Abd ElazizNo ratings yet
- Massachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceDocument7 pagesMassachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceFernando Sánchez HernándezNo ratings yet
- MemlessCTDSM - R S AshwinKumarDocument11 pagesMemlessCTDSM - R S AshwinKumarhemanthNo ratings yet
- DecapDocument6 pagesDecapayyannagaraga1No ratings yet
- A Low Noise Power 45 NM Technology Based Simultaneous Switching Noise (SSN) Reduction Model For Mixed Signal VLSI CircuitsDocument7 pagesA Low Noise Power 45 NM Technology Based Simultaneous Switching Noise (SSN) Reduction Model For Mixed Signal VLSI Circuitsdwie2254No ratings yet
- UNIT 3: Transistor Sizing in CMOS: Aims and ObjectivesDocument12 pagesUNIT 3: Transistor Sizing in CMOS: Aims and ObjectivesGirish Kv50% (2)
- Comparative Analysis of Efficient Designs of D Latch Using 32nm CMOS TechnologyDocument4 pagesComparative Analysis of Efficient Designs of D Latch Using 32nm CMOS TechnologyEditor IJTSRDNo ratings yet
- Design of A 85 GHZ Rotary Traveling Wave Oscillator For Imaging ApplicationsDocument4 pagesDesign of A 85 GHZ Rotary Traveling Wave Oscillator For Imaging ApplicationsEditor IJRITCCNo ratings yet
- Low Voltage Analog Circuit Design Techniques A TutorialDocument17 pagesLow Voltage Analog Circuit Design Techniques A TutorialRafael Rguez SNo ratings yet
- Vlsi Design - Ec - 701 - Unit - 2Document18 pagesVlsi Design - Ec - 701 - Unit - 2angelcrystl4774No ratings yet
- 3.5 MOSFET Scaling and Small-Geometry EffectsDocument19 pages3.5 MOSFET Scaling and Small-Geometry Effectspraritlamba25No ratings yet
- Design Method For An Ultra Low Power, Low Offset, Symmetric OTADocument7 pagesDesign Method For An Ultra Low Power, Low Offset, Symmetric OTASiddharthJainNo ratings yet
- Electronics: Design of A Wide-Band Voltage-Controlled Ring Oscillator Implemented in 180 NM CMOS TechnologyDocument17 pagesElectronics: Design of A Wide-Band Voltage-Controlled Ring Oscillator Implemented in 180 NM CMOS TechnologyRam MNo ratings yet
- Ee141 HW5 2Document3 pagesEe141 HW5 2Vidhya DsNo ratings yet
- Design Procedure For Noise and Power Optimisation of CMOS Folded-Cascode Operational Transconductance Amplifier Based On The Inversion CoefficientDocument14 pagesDesign Procedure For Noise and Power Optimisation of CMOS Folded-Cascode Operational Transconductance Amplifier Based On The Inversion Coefficientjeevamk423No ratings yet
- Low Power DCT Architecture For Image/Video Coders: IPASJ International Journal of Electronics & Communication (IIJEC)Document10 pagesLow Power DCT Architecture For Image/Video Coders: IPASJ International Journal of Electronics & Communication (IIJEC)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Answer Key - Vlsi CIA IDocument5 pagesAnswer Key - Vlsi CIA IMaadheshNo ratings yet
- Das 2018Document10 pagesDas 2018Ruksa BegumNo ratings yet
- A BDD-based Design of An Area-Power Efficient Asynchronous AdderDocument12 pagesA BDD-based Design of An Area-Power Efficient Asynchronous AdderManjunath BeleriNo ratings yet
- A High Performance 90 NM CMOS SAR ADC With HybridDocument8 pagesA High Performance 90 NM CMOS SAR ADC With HybridSounakDuttaNo ratings yet
- 31 141 146 PDFDocument6 pages31 141 146 PDFlambanaveenNo ratings yet
- All Inversion RegionDocument4 pagesAll Inversion RegionAshwin BhatNo ratings yet
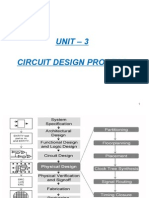
- Unit - 3 Circuit Design ProcessDocument30 pagesUnit - 3 Circuit Design ProcessNagarjun RajputNo ratings yet
- A Low Power Single Phase Clock Distribution Using VLSI TechnologyDocument5 pagesA Low Power Single Phase Clock Distribution Using VLSI TechnologyNano Scientific Research Centre pvt ltd100% (1)
- Daniel Proj 1997 Transcond AmpDocument15 pagesDaniel Proj 1997 Transcond AmpIbrahim MuhammedNo ratings yet
- Bollepalli Deepthi AdditionDocument10 pagesBollepalli Deepthi AdditionYermakov Vadim IvanovichNo ratings yet
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Types of TriggeringDocument7 pagesTypes of Triggeringfitejal682No ratings yet
- General PLC ArchitectureDocument32 pagesGeneral PLC ArchitecturesatheeshNo ratings yet
- Minor Project Final Report + 16 Bit Microprocessor Using VHDLDocument53 pagesMinor Project Final Report + 16 Bit Microprocessor Using VHDLAmit Prakash Pandey50% (4)
- How To Make Arduino On Breadboard - Step by Step Instructions - Homemade Circuit Projects PDFDocument12 pagesHow To Make Arduino On Breadboard - Step by Step Instructions - Homemade Circuit Projects PDFKuldeep SinghNo ratings yet
- Verilog Lab ManualDocument72 pagesVerilog Lab ManualAditya NarayanNo ratings yet
- Data Sheet: HEF4040B MSIDocument5 pagesData Sheet: HEF4040B MSIabessedaNo ratings yet
- 4 Instruction PipelineDocument13 pages4 Instruction PipelineAKASH PALNo ratings yet
- Read & Write CycleDocument22 pagesRead & Write CycleAditeeNo ratings yet
- Register and Its OperationsDocument56 pagesRegister and Its OperationsSARTHAK VARSHNEYNo ratings yet
- Ne 555Document37 pagesNe 555Oscar GonzalezNo ratings yet
- Design and Implementation of Domino Logic Circuit in CmosDocument4 pagesDesign and Implementation of Domino Logic Circuit in Cmosrakheep123No ratings yet
- Vlsi Ieee 2022-23 - 9581464142Document10 pagesVlsi Ieee 2022-23 - 9581464142msr edusoftNo ratings yet
- Mini Project: Designing 4-Bit Synchronous Down Counter With JK Flip FlopDocument8 pagesMini Project: Designing 4-Bit Synchronous Down Counter With JK Flip FlopAnkur SinghNo ratings yet
- Geeration of ComputerDocument2 pagesGeeration of ComputerHumbert KhyriemNo ratings yet
- Bscan Kenneth ParkerDocument315 pagesBscan Kenneth ParkerGOKUL TNo ratings yet
- Assignment - 2 LSTDocument6 pagesAssignment - 2 LSTNagarjun ReddyNo ratings yet
- Memory DevicesDocument19 pagesMemory DevicesMst. Najnin SultanaNo ratings yet
- Btech Vlsi Major Project ListDocument3 pagesBtech Vlsi Major Project ListEDUGENE TECHNOLOGIESNo ratings yet
- DD Lab Expt 2Document9 pagesDD Lab Expt 2Umang goelNo ratings yet
- Mid 1Document43 pagesMid 1Franch Maverick Arellano Lorilla0% (1)
- L06 - RISCV Datapath DesignDocument78 pagesL06 - RISCV Datapath DesignMishkaat100% (1)
- 8085 ArchitectureDocument39 pages8085 Architecturemnnit_nitNo ratings yet
- Assignment 1: Shriram K - Reconfigurable Computing - 2020Ht01523Document8 pagesAssignment 1: Shriram K - Reconfigurable Computing - 2020Ht01523SHRIRAM KNo ratings yet
- Automatic Temperature ControllerDocument24 pagesAutomatic Temperature Controllerarunbera00792% (12)
- Chapter 04 Computer Architecture and DDocument95 pagesChapter 04 Computer Architecture and DPooja VashisthNo ratings yet
- L3: Microprocessor and MicrocontrollerDocument78 pagesL3: Microprocessor and MicrocontrollerMahesh100% (1)
- Switching Circuits & Logic Design: 18 Circuits For Arithmetic OperationsDocument8 pagesSwitching Circuits & Logic Design: 18 Circuits For Arithmetic OperationsGajinder SinghNo ratings yet
- N-Bit Shift Register PDFDocument232 pagesN-Bit Shift Register PDFAnuradha KhalkhoNo ratings yet
- Lg8738-05a (CXP86441)Document22 pagesLg8738-05a (CXP86441)Wasantha MunasinghaNo ratings yet