You might also like
- NDU EEN 340 Signals and Systems Fall 2020Document2 pagesNDU EEN 340 Signals and Systems Fall 2020Elio EidNo ratings yet
- 04 B. E. BME Syllabus 2017 Regulation 1 PDFDocument11 pages04 B. E. BME Syllabus 2017 Regulation 1 PDFVigneshkNo ratings yet
- Anna University - Bio Medical Engineering Syllabus Reg - 2017Document11 pagesAnna University - Bio Medical Engineering Syllabus Reg - 2017Haem Nahth50% (2)
- Signal and System SyllabusDocument2 pagesSignal and System SyllabusVinay PrakashNo ratings yet
- SS Notes FinalDocument182 pagesSS Notes Finalanjum samreenNo ratings yet
- Applied MathematicsDocument2 pagesApplied MathematicsRobinNo ratings yet
- 14EI406 CO & LOS - Signals and SystemsDocument5 pages14EI406 CO & LOS - Signals and SystemsbvkswamyNo ratings yet
- Signal and System: Introduction To Signals and SystemsDocument2 pagesSignal and System: Introduction To Signals and SystemsAnonymous HyOfbJ6No ratings yet
- R 20 Signals and SystemsDocument174 pagesR 20 Signals and SystemsTHE INDIAN ATLASNo ratings yet
- SEMESTER III SIGNALS & SYSTEMS AND NETWORK ANALYSISDocument41 pagesSEMESTER III SIGNALS & SYSTEMS AND NETWORK ANALYSISAbhay RameshNo ratings yet
- Signals and SystemsDocument1 pageSignals and SystemsKrista JacksonNo ratings yet
- Course Specification - EEE-3501Document4 pagesCourse Specification - EEE-3501Tanzim MushtaryNo ratings yet
- Signals and SystemsDocument174 pagesSignals and Systemsjale charitha reddy50% (2)
- ECE220: Signals and Systems Course OverviewDocument2 pagesECE220: Signals and Systems Course Overviewjeet kumarNo ratings yet
- SignalDocument1 pageSignalLuv VermaniNo ratings yet
- B.Tech - ECE Syllabus IV Year - Signal and System 3014Document3 pagesB.Tech - ECE Syllabus IV Year - Signal and System 3014tarang srivasNo ratings yet
- Se Entc ( IV Sems -2019 )Document36 pagesSe Entc ( IV Sems -2019 )Chinmay KulkarniNo ratings yet
- IARE ECE SS SyllabusDocument3 pagesIARE ECE SS SyllabussnbvshcvdscNo ratings yet
- EC109 Signals and System Analysis: L-T-P: 3-1-0 Total 42 LecturesDocument2 pagesEC109 Signals and System Analysis: L-T-P: 3-1-0 Total 42 LecturesSNo ratings yet
- 13.302 SIGNALS & SYSTEMS (ATDocument7 pages13.302 SIGNALS & SYSTEMS (ATSurya TejaNo ratings yet
- BECE202L_SIGNALS-AND-SYSTEMS_TH_1.0_65_BECE202LDocument3 pagesBECE202L_SIGNALS-AND-SYSTEMS_TH_1.0_65_BECE202LMohit SubramaniamNo ratings yet
- S&S PDFDocument224 pagesS&S PDFMohammed MateenNo ratings yet
- FET and MOSFET Hybrid π Circuits, Frequency Response, Power Supplies and TestingDocument2 pagesFET and MOSFET Hybrid π Circuits, Frequency Response, Power Supplies and TestingJesudass INo ratings yet
- Signals and Systems S5 SyllabusDocument2 pagesSignals and Systems S5 SyllabusBala GopalNo ratings yet
- 3RDDocument14 pages3RDPiyush KumarNo ratings yet
- Signals and Systems AnalysisDocument4 pagesSignals and Systems AnalysisGebru GurmessaNo ratings yet
- SNS CourseDocument4 pagesSNS CourseAbhay ChaudharyNo ratings yet
- Ece IVDocument20 pagesEce IVIlavarasan TamizhNo ratings yet
- ECE-R13-II-year-JNTUA Syllabus PDFDocument33 pagesECE-R13-II-year-JNTUA Syllabus PDFnbprNo ratings yet
- Dynamics of Linear Systems PDFDocument3 pagesDynamics of Linear Systems PDFBhautik Daxini100% (2)
- Lecture PlanDocument19 pagesLecture PlanSougata GhoshNo ratings yet
- 5THDocument25 pages5THPiyush KumarNo ratings yet
- PhysicsDocument28 pagesPhysicsAniket DeyNo ratings yet
- Learn Signals and Systems FundamentalsDocument1 pageLearn Signals and Systems FundamentalsKarthik AcharyaNo ratings yet
- EECE 340 EECE 340: Signals and SystemsDocument23 pagesEECE 340 EECE 340: Signals and SystemsJoseph IbrahimNo ratings yet
- Syllabus 3rd SemDocument5 pagesSyllabus 3rd SemAnuj MishraNo ratings yet
- Lesson PlanDocument3 pagesLesson Plansimi sahuNo ratings yet
- Complex Variables Transforms (OBE Format)Document4 pagesComplex Variables Transforms (OBE Format)Haris AsifNo ratings yet
- Signal and Systems: Beg 334 Ec Year: III Semester: IDocument2 pagesSignal and Systems: Beg 334 Ec Year: III Semester: IPratik BajracharyaNo ratings yet
- Complex Variables & Transforms CourseDocument4 pagesComplex Variables & Transforms CourseAdnan KarimNo ratings yet
- S&S NotesDocument2 pagesS&S NotesVarad JinturkarNo ratings yet
- Complete - Lec01-06 - CT Signals and TD AnalysisDocument103 pagesComplete - Lec01-06 - CT Signals and TD AnalysisDaniya AbbasiNo ratings yet
- JUST Signals and Systems Course OverviewDocument2 pagesJUST Signals and Systems Course OverviewMohammad DarrasNo ratings yet
- CORE Theory Subjects: A. Outline of The CourseDocument2 pagesCORE Theory Subjects: A. Outline of The CourseArpita SinghNo ratings yet
- Course 19bDocument2 pagesCourse 19bpankhuri18No ratings yet
- EC202 Signals and SystemsDocument2 pagesEC202 Signals and SystemsThulasi M SanthiNo ratings yet
- EC202 Signals & SystemsDocument3 pagesEC202 Signals & Systemsanupvasu0% (1)
- Wavelet TransformDocument3 pagesWavelet Transformmitul patelNo ratings yet
- DSP DR P VenkatesanDocument120 pagesDSP DR P VenkatesandineshNo ratings yet
- Gujarat University: B.E-Ii Semester - Iii (Electrical & Electronics) Ee - 301 (Ec-301) Engineering MathematicsDocument62 pagesGujarat University: B.E-Ii Semester - Iii (Electrical & Electronics) Ee - 301 (Ec-301) Engineering Mathematicsmihir3011No ratings yet
- Maulana Abul Kalam Azad University of Technology, West Bengal (Formerly West Bengal University of Technology)Document2 pagesMaulana Abul Kalam Azad University of Technology, West Bengal (Formerly West Bengal University of Technology)DeepthikattaNo ratings yet
- Stability of Linear Systems: Some Aspects of Kinematic SimilarityFrom EverandStability of Linear Systems: Some Aspects of Kinematic SimilarityNo ratings yet
- Modern Vibrational Spectroscopy and Micro-Spectroscopy: Theory, Instrumentation and Biomedical ApplicationsFrom EverandModern Vibrational Spectroscopy and Micro-Spectroscopy: Theory, Instrumentation and Biomedical ApplicationsNo ratings yet
- Lumped and Distributed Passive Networks: A Generalized and Advanced ViewpointFrom EverandLumped and Distributed Passive Networks: A Generalized and Advanced ViewpointNo ratings yet
- Linear Differential and Difference Equations: A Systems Approach for Mathematicians and EngineersFrom EverandLinear Differential and Difference Equations: A Systems Approach for Mathematicians and EngineersNo ratings yet
- Optical Communication 2017,2018,2020 and 2021 Past Questions and SolutionsDocument42 pagesOptical Communication 2017,2018,2020 and 2021 Past Questions and SolutionsMelsougly BryceNo ratings yet
- Fiberoptic CommunicationDocument5 pagesFiberoptic CommunicationMelsougly BryceNo ratings yet
- Year 4 2017Document31 pagesYear 4 2017Melsougly BryceNo ratings yet
- AssignmentDocument2 pagesAssignmentMelsougly BryceNo ratings yet
- Year 4 2021-Second Semester Exams 2Document3 pagesYear 4 2021-Second Semester Exams 2Melsougly BryceNo ratings yet
- Year 4 2017Document31 pagesYear 4 2017Melsougly BryceNo ratings yet
- Optical Communication Past Questions and SolutionsDocument25 pagesOptical Communication Past Questions and SolutionsMelsougly BryceNo ratings yet
- Optical Communications Eeng425Document5 pagesOptical Communications Eeng425Melsougly BryceNo ratings yet
- Optical Communications Eeng425Document5 pagesOptical Communications Eeng425Melsougly BryceNo ratings yet
- Digital Systems Design Using PLDsDocument22 pagesDigital Systems Design Using PLDsMelsougly BryceNo ratings yet
- Optical ComDocument20 pagesOptical ComMelsougly BryceNo ratings yet
- Optical Comm - Oct2020Document2 pagesOptical Comm - Oct2020Melsougly BryceNo ratings yet
- Optical Communications Eeng425 - Sept2018Document3 pagesOptical Communications Eeng425 - Sept2018Melsougly BryceNo ratings yet
- Revised Advanced Digital Systems Design 04 For PresentationDocument13 pagesRevised Advanced Digital Systems Design 04 For PresentationMelsougly BryceNo ratings yet
- Advanced Digital Systems Design 09Document22 pagesAdvanced Digital Systems Design 09Melsougly BryceNo ratings yet
- Revised Advanced Digital Systems Design 04Document10 pagesRevised Advanced Digital Systems Design 04Melsougly BryceNo ratings yet
- Revised Advanced Digital Systems Design 04Document10 pagesRevised Advanced Digital Systems Design 04Melsougly BryceNo ratings yet
- Revised Advanced Digital Systems Design 07Document17 pagesRevised Advanced Digital Systems Design 07Melsougly BryceNo ratings yet
- Advanced Digital Systems Design 09Document23 pagesAdvanced Digital Systems Design 09Melsougly BryceNo ratings yet
- Advanced Digital Systems Design 03Document13 pagesAdvanced Digital Systems Design 03Melsougly BryceNo ratings yet
- Advanced Digital Systems Design 03Document13 pagesAdvanced Digital Systems Design 03Melsougly BryceNo ratings yet
- Digital Systems Design Using PLDsDocument23 pagesDigital Systems Design Using PLDsMelsougly BryceNo ratings yet
- Digital System Design Course OverviewDocument26 pagesDigital System Design Course OverviewMelsougly BryceNo ratings yet
- Four Bay College module explores reliability analysisDocument14 pagesFour Bay College module explores reliability analysisMelsougly BryceNo ratings yet
- ADSD Assignment 1.0Document3 pagesADSD Assignment 1.0Melsougly BryceNo ratings yet
- Advanced Digital Systems Design 01Document24 pagesAdvanced Digital Systems Design 01Melsougly BryceNo ratings yet
- Advanced Digital Systems Design 02Document14 pagesAdvanced Digital Systems Design 02Melsougly BryceNo ratings yet
- Fault diagnosis experiments in combinational circuitsDocument4 pagesFault diagnosis experiments in combinational circuitsMelsougly BryceNo ratings yet
- Revised Advanced Digital Systems Design 06Document19 pagesRevised Advanced Digital Systems Design 06Melsougly BryceNo ratings yet
- Revised Advanced Digital Systems Design 07Document17 pagesRevised Advanced Digital Systems Design 07Melsougly BryceNo ratings yet
- Determination of Slurry Abrasivity (Miller Number) and Slurry Abrasion Response of Materials (SAR Number)Document21 pagesDetermination of Slurry Abrasivity (Miller Number) and Slurry Abrasion Response of Materials (SAR Number)mohammed karasnehNo ratings yet
- Kinematics in Two Dimensions: Projectile and Circular MotionDocument11 pagesKinematics in Two Dimensions: Projectile and Circular MotionKapelsuNo ratings yet
- Phase Transition Dynamics, Onuki A, CUP 2002Document725 pagesPhase Transition Dynamics, Onuki A, CUP 2002Ionut Florica100% (1)
- Intenship Report Sumit Nagar PDFDocument14 pagesIntenship Report Sumit Nagar PDFSumit NagarNo ratings yet
- GR 7 ASSET WORKSHEET HWDocument6 pagesGR 7 ASSET WORKSHEET HWSharon BijuNo ratings yet
- Sustainable Energy Technologies and Assessments: Jaume Fit O, Julien Ramousse, Sacha Hodencq, FR Ed Eric WurtzDocument18 pagesSustainable Energy Technologies and Assessments: Jaume Fit O, Julien Ramousse, Sacha Hodencq, FR Ed Eric WurtzMatheus M. DwinantoNo ratings yet
- Electrostatics in Vacuum - 1673699222Document73 pagesElectrostatics in Vacuum - 1673699222Jigyarth SharmaNo ratings yet
- Real Numbers and Polynomials QuestionsDocument54 pagesReal Numbers and Polynomials QuestionsAkansha Maurya82% (22)
- 01 02 JournalDocument2 pages01 02 JournalDavisha DixonNo ratings yet
- Piper Seneca II Power ManagerDocument1 pagePiper Seneca II Power ManagerAlejandro0% (1)
- DG - 1411114236 - 3plastic Part Design GuidelinesDocument38 pagesDG - 1411114236 - 3plastic Part Design GuidelinesK S RANJITH ランジットNo ratings yet
- Visual Testing: - Asme - Section 5 (NDT) - Section 5 - Article 9 (VT)Document29 pagesVisual Testing: - Asme - Section 5 (NDT) - Section 5 - Article 9 (VT)MAXX ENGINEERS100% (1)
- CFD Analysis of A Wickless Heat Pipe: January 2018Document8 pagesCFD Analysis of A Wickless Heat Pipe: January 2018Optimuz TsNo ratings yet
- 1-Relative Velocity in Special Relativity: Page898 CollegeDocument26 pages1-Relative Velocity in Special Relativity: Page898 CollegeAbdulrhman fNo ratings yet
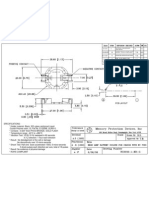
- 10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DDocument1 page10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DyogpanditNo ratings yet
- Taking Time Seriously: A Theory of Socioemotional SelectivityDocument17 pagesTaking Time Seriously: A Theory of Socioemotional SelectivityDaniNo ratings yet
- ESci 110 - N046 - Lesson 7.3 AssessmentDocument6 pagesESci 110 - N046 - Lesson 7.3 AssessmentIvy PerezNo ratings yet
- Class XII-linear ProgrammingDocument6 pagesClass XII-linear ProgrammingSWETHA VNNo ratings yet
- Frequency Response AnalysisDocument29 pagesFrequency Response AnalysisAravindh NatarajanNo ratings yet
- MMW-Lecture1-Patterns and Numbers in NatureDocument28 pagesMMW-Lecture1-Patterns and Numbers in NatureChris William HernandezNo ratings yet
- Ch. 18 Fundamentals of Spectrophotometry: What Is Spectroscopy?Document4 pagesCh. 18 Fundamentals of Spectrophotometry: What Is Spectroscopy?JaiNo ratings yet
- en 12004-2-2017 CenDocument35 pagesen 12004-2-2017 CenMalak Hindi100% (2)
- Atom Levels Term SymbolDocument21 pagesAtom Levels Term SymbolUlfa WulandariNo ratings yet
- Paper 6 PDFDocument12 pagesPaper 6 PDFRawan Abd ElaatyNo ratings yet
- Chemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 1)Document46 pagesChemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 1)FATMIENo ratings yet
- WoPhO 2011 S12Document12 pagesWoPhO 2011 S12TienMC GamerNo ratings yet
- Electric Circuit Research PaperDocument4 pagesElectric Circuit Research PaperXChoGodxNo ratings yet
- Exercises - Chapter 02Document12 pagesExercises - Chapter 02Phong ĐâyNo ratings yet
- Intuitive Intelligence: Accessing The Wisdom of Head, Heart and HaraDocument5 pagesIntuitive Intelligence: Accessing The Wisdom of Head, Heart and HaradNo ratings yet
- What Is Mathematics GoedelDocument238 pagesWhat Is Mathematics Goedeledgartepe4324No ratings yet