You might also like
- Vector-valued function and distribution spaces on the torusFrom EverandVector-valued function and distribution spaces on the torusNo ratings yet
- Project Daily Report 22 11 2022 USIDocument1 pageProject Daily Report 22 11 2022 USICheaSokimNo ratings yet
- Refrigeration Processes: A Practical Handbook on the Physical Properties of Refrigerants and their ApplicationsFrom EverandRefrigeration Processes: A Practical Handbook on the Physical Properties of Refrigerants and their ApplicationsRating: 3 out of 5 stars3/5 (2)
- BMP Min STD G 2005 Hauling RoadDocument8 pagesBMP Min STD G 2005 Hauling RoadSlamet SetyowibowoNo ratings yet
- Materi 10 - Pengenalan Alat Pada Pekerjaan KonstruksiDocument40 pagesMateri 10 - Pengenalan Alat Pada Pekerjaan KonstruksiAndi Muhammad FaridNo ratings yet
- Power Showel1Document1 pagePower Showel1Praveen YadavNo ratings yet
- Jsa of ExcavationonDocument5 pagesJsa of ExcavationonpoovazhaganNo ratings yet
- Project Name: Myanmar Aquarium Project: 1 Year 102Document3 pagesProject Name: Myanmar Aquarium Project: 1 Year 102Yati ChanNo ratings yet
- Project Name: Myanmar Aquarium Project: 1 Year 106Document3 pagesProject Name: Myanmar Aquarium Project: 1 Year 106Yati ChanNo ratings yet
- QS Lecture#2 EarthworksDocument8 pagesQS Lecture#2 EarthworksJohn AbandoNo ratings yet
- Capacity Charts enDocument56 pagesCapacity Charts enDaniel Castillo PeñaNo ratings yet
- Homework MachinesDocument1 pageHomework Machinesmasterchieft152No ratings yet
- Daily Report: Project Name: Myanmar Aquarium ProjectDocument3 pagesDaily Report: Project Name: Myanmar Aquarium ProjectmcgNo ratings yet
- Hopper Discharge SystemsDocument8 pagesHopper Discharge SystemsJakesNo ratings yet
- Optimization of Component of Excavator Bucket: Volume 2 Issue2 PP 076-078 May 2013Document3 pagesOptimization of Component of Excavator Bucket: Volume 2 Issue2 PP 076-078 May 2013Venkat ReddyNo ratings yet
- Cementing Through Coiled Tubing OPS-GLB-En-103156Document28 pagesCementing Through Coiled Tubing OPS-GLB-En-103156MAIKEL QUINTERO100% (1)
- Section6 - Priced Bill of QuantitiesDocument15 pagesSection6 - Priced Bill of QuantitiesNoman AbiNo ratings yet
- HEMM-Wheel Loader01Document13 pagesHEMM-Wheel Loader01miningnova2100% (1)
- Mass Blasting & Mine MachineryDocument13 pagesMass Blasting & Mine MachinerySidhartha MandalNo ratings yet
- Project Name: Myanmar Aquarium Project: 1 Year 165Document3 pagesProject Name: Myanmar Aquarium Project: 1 Year 165mcgNo ratings yet
- CT530Document64 pagesCT530Sachin S 037CTMNo ratings yet
- Daily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)Document1 pageDaily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)KumaResan SubramaniamNo ratings yet
- SIte Daily Report 2018-10-11Document1 pageSIte Daily Report 2018-10-11qeshyaNo ratings yet
- Drop Down List: Sensitivity: LNT Construction Internal UseDocument14 pagesDrop Down List: Sensitivity: LNT Construction Internal UseGnana Sekar BNo ratings yet
- Daily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)Document1 pageDaily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)KumaResan SubramaniamNo ratings yet
- Unit-2 EXCAVATION EQUIPMENT-11Document27 pagesUnit-2 EXCAVATION EQUIPMENT-11rakeshNo ratings yet
- Project Name: Myanmar Aquarium Project: 1 Year 139Document3 pagesProject Name: Myanmar Aquarium Project: 1 Year 139mcgNo ratings yet
- Civil Boq KoscwDocument68 pagesCivil Boq KoscwSelvakumar SNo ratings yet
- Equipment Productivity DetailsDocument3 pagesEquipment Productivity DetailsRana Muhammad TalhaNo ratings yet
- 4 Boq Plumbing 06.12.15Document7 pages4 Boq Plumbing 06.12.15shefali chaudharyNo ratings yet
- En g2wl01 0814 v1 Wheel LoaderDocument7 pagesEn g2wl01 0814 v1 Wheel LoaderMohan PreethNo ratings yet
- Daily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)Document1 pageDaily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)KumaResan SubramaniamNo ratings yet
- Daily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)Document1 pageDaily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)KumaResan SubramaniamNo ratings yet
- Dayworks ScheduleDocument4 pagesDayworks ScheduleRyan De Vera Pagal100% (2)
- Firestone OTR Databook 10 27 2017Document68 pagesFirestone OTR Databook 10 27 2017Rodrigo CatotaNo ratings yet
- CIVIL Daily Construction Report DCR FormatDocument6 pagesCIVIL Daily Construction Report DCR FormatXozanNo ratings yet
- Ref1 Tc-211 Eng Ver2Document10 pagesRef1 Tc-211 Eng Ver2Naim ParvejNo ratings yet
- Daily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)Document1 pageDaily Report: Privatisation of Sungai Besi - Ulu Kelang Elevated Expressway (Suke)KumaResan SubramaniamNo ratings yet
- Work SlipDocument8 pagesWork Slipsatishghanvat1No ratings yet
- Lathe MachineDocument5 pagesLathe MachineHuda FahimNo ratings yet
- Zone CDocument17 pagesZone C01095902062ahmedNo ratings yet
- Daily Report CoatingDocument2 pagesDaily Report CoatingjhdmssNo ratings yet
- Supervisor Daily Report-Time Sheet-R5eDocument5 pagesSupervisor Daily Report-Time Sheet-R5eMohamed RizwanNo ratings yet
- DCR - Daily Construction Report - 001Document2 pagesDCR - Daily Construction Report - 001Karim SandNo ratings yet
- ChartDocument14 pagesChartpallawNo ratings yet
- Crane - Electrical Wiring DiagramDocument83 pagesCrane - Electrical Wiring DiagramSaiful Islam100% (2)
- Bulldozer 2Document43 pagesBulldozer 2hamidshahNo ratings yet
- Manual CAT 428-II-1990Document14 pagesManual CAT 428-II-1990Francisco BarrosNo ratings yet
- Lift Plan - General DetailsDocument11 pagesLift Plan - General Detailsadeniyi abiolaNo ratings yet
- Dedicated Freight Corridor Corporation of India LTD.: 0 Hywa DumpedDocument1 pageDedicated Freight Corridor Corporation of India LTD.: 0 Hywa DumpedSaraswati ChandraNo ratings yet
- Dockyard & Engineering P3Document7 pagesDockyard & Engineering P3Reaz RabbyNo ratings yet
- Heavy Lift Equipment PresentationDocument36 pagesHeavy Lift Equipment PresentationzmahfudzNo ratings yet
- JCB Backhoe Loader UtilityDocument4 pagesJCB Backhoe Loader UtilityMiguel F. AgüeraNo ratings yet
- sAMPLING eSTIMATEDocument16 pagessAMPLING eSTIMATEYsabelle TagarumaNo ratings yet
- Daily Supervisors Report-R5fDocument2 pagesDaily Supervisors Report-R5fMohamed RizwanNo ratings yet
- IFIF@: Ehicle Request Form & Rigging PlanDocument1 pageIFIF@: Ehicle Request Form & Rigging PlanfahadullahNo ratings yet
- Method Statement Pedestrian Bridge ConstructionDocument2 pagesMethod Statement Pedestrian Bridge ConstructionForbes KambaNo ratings yet
- Project Name: Myanmar Aquarium Project: 1 Year 43Document3 pagesProject Name: Myanmar Aquarium Project: 1 Year 43Yati ChanNo ratings yet
- Daily Report November 11, 2022 Extension Belt Conveyor A-121 and B-131Document2 pagesDaily Report November 11, 2022 Extension Belt Conveyor A-121 and B-131sefina mecNo ratings yet
- Ultra Ma FicDocument25 pagesUltra Ma FicSlamet SetyowibowoNo ratings yet
- Drilling and Blasting Activities at Senakin Mine ProjectDocument18 pagesDrilling and Blasting Activities at Senakin Mine ProjectSlamet SetyowibowoNo ratings yet
- Cost Efficiency StrategiesDocument16 pagesCost Efficiency StrategiesSlamet SetyowibowoNo ratings yet
- Financial AnalysisDocument11 pagesFinancial AnalysisSlamet SetyowibowoNo ratings yet
- Talc - and Serpentine-Like "Garnierites"Document2 pagesTalc - and Serpentine-Like "Garnierites"Slamet SetyowibowoNo ratings yet
- PTI Laterite Training - May 2008-EDocument197 pagesPTI Laterite Training - May 2008-ESlamet SetyowibowoNo ratings yet
- Am70 549Document10 pagesAm70 549Slamet SetyowibowoNo ratings yet
- Ni Laterite Short Course 050512Document214 pagesNi Laterite Short Course 050512Slamet SetyowibowoNo ratings yet
- Am78 405Document10 pagesAm78 405Slamet SetyowibowoNo ratings yet
- Nickel / Cobalt Laterite Processes: by Boy Adhitya Presented By: Frans AttongDocument30 pagesNickel / Cobalt Laterite Processes: by Boy Adhitya Presented By: Frans AttongSlamet SetyowibowoNo ratings yet
- Determination Mineralogical Ore Types of Pomalaa HPAL Project: Study of Semiquantitative XRD Mineral AnalysesDocument24 pagesDetermination Mineralogical Ore Types of Pomalaa HPAL Project: Study of Semiquantitative XRD Mineral AnalysesSlamet SetyowibowoNo ratings yet
- Minerals Associated With LateritesDocument14 pagesMinerals Associated With LateritesSlamet SetyowibowoNo ratings yet
- Ultra Ma FicDocument25 pagesUltra Ma FicSlamet SetyowibowoNo ratings yet
- Bulk Sampling Co MN CR UpgradingDocument29 pagesBulk Sampling Co MN CR UpgradingSlamet SetyowibowoNo ratings yet
- Soroako Serpentinisation 16 Oct 03Document24 pagesSoroako Serpentinisation 16 Oct 03Slamet SetyowibowoNo ratings yet
- The Occurence and Type of Laterite in Sorowako - 11-02-05Document15 pagesThe Occurence and Type of Laterite in Sorowako - 11-02-05Slamet SetyowibowoNo ratings yet
- Method: - Air Photo Interpretation - Landform - Lineament - Core Physical PropertiesDocument8 pagesMethod: - Air Photo Interpretation - Landform - Lineament - Core Physical PropertiesSlamet SetyowibowoNo ratings yet
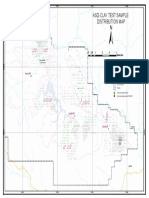
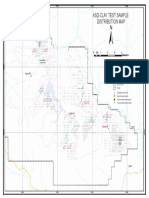
- SCM ASD-Clay Test Sample Distribution - Rev01Document1 pageSCM ASD-Clay Test Sample Distribution - Rev01Slamet SetyowibowoNo ratings yet
- SCM ASD-Clay Test Sample Distribution - REV02Document1 pageSCM ASD-Clay Test Sample Distribution - REV02Slamet SetyowibowoNo ratings yet
- BMP Min Wi G 2026 Clean Up After RainDocument13 pagesBMP Min Wi G 2026 Clean Up After RainSlamet SetyowibowoNo ratings yet
- Murrin MurrinDocument3 pagesMurrin MurrinSlamet SetyowibowoNo ratings yet
- Nickeliferous Nontronite, A 15A Garnierite, at Niquelandia, Goias, BrazilDocument5 pagesNickeliferous Nontronite, A 15A Garnierite, at Niquelandia, Goias, BrazilSlamet SetyowibowoNo ratings yet
- Final Estimate of MaterialsDocument5 pagesFinal Estimate of MaterialsRJNo ratings yet
- bs1387 1 PDFDocument1 pagebs1387 1 PDFDo BuiNo ratings yet
- Internal Wall and PartitionDocument2 pagesInternal Wall and PartitionteeyuanNo ratings yet
- Msme RajkotDocument33 pagesMsme RajkotDarshil DhruvNo ratings yet
- Is 1367 Bolt TestingDocument2 pagesIs 1367 Bolt TestingLakshmi NarayananNo ratings yet
- Brivis Wall Control ManualDocument117 pagesBrivis Wall Control ManualVeky Victoria50% (2)
- UCK 353E Aerospace Materials-Testing-2018 PDFDocument47 pagesUCK 353E Aerospace Materials-Testing-2018 PDFSedat ÖzNo ratings yet
- FINAL - Predictive Maintenance in Garment IndustryDocument52 pagesFINAL - Predictive Maintenance in Garment IndustryAashish Kumar100% (1)
- Bell & Gosset PumpDocument8 pagesBell & Gosset Pumprogel_ganaNo ratings yet
- Garima Global Pvt. LTD.: Material Test CertificateDocument2 pagesGarima Global Pvt. LTD.: Material Test CertificateRima AroraNo ratings yet
- Actuation Sizing ChartDocument12 pagesActuation Sizing ChartBùi Cảnh TrungNo ratings yet
- 8-1 Technical+Specification+for+Refrigerating+Units PDFDocument94 pages8-1 Technical+Specification+for+Refrigerating+Units PDFRyan WongNo ratings yet
- PDFDocument34 pagesPDFrehan100% (2)
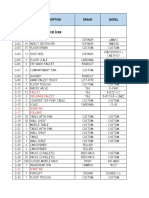
- Tools StatusDocument10 pagesTools StatusMachinery ClubNo ratings yet
- Clamps Poster EnglishDocument1 pageClamps Poster EnglishdivortiareNo ratings yet
- YES1 ATS Series GA Model Instruction Book PDFDocument21 pagesYES1 ATS Series GA Model Instruction Book PDFAlexander Cepeda QuinteroNo ratings yet
- Sprinkler Irrigation SystemDocument2 pagesSprinkler Irrigation SystemNikita KadamNo ratings yet
- Sad LaypDocument8 pagesSad LaypEdwin Quinlat DevizaNo ratings yet
- SRAM Leakage Suppression by Minimizing Standby Supply VoltageDocument19 pagesSRAM Leakage Suppression by Minimizing Standby Supply Voltageapi-19668941No ratings yet
- Manual Fe30-32-50-100Document12 pagesManual Fe30-32-50-100ronl7390No ratings yet
- Safety Grating CatalogDocument22 pagesSafety Grating CatalogzhukeeNo ratings yet
- LevelQuik RSDocument3 pagesLevelQuik RSFlaTravelNo ratings yet
- PVC and WPC Wood Plastic Panel Production Line en PDFDocument1 pagePVC and WPC Wood Plastic Panel Production Line en PDFMihaiNo ratings yet
- BhagalpurDocument17 pagesBhagalpurRaviArryanNo ratings yet
- Access Control 101 For Pre Class FinalDocument53 pagesAccess Control 101 For Pre Class FinalMohd QuddusNo ratings yet
- Operation and Maintenance Manual Mitsubishi SS Series Engelska PDFDocument93 pagesOperation and Maintenance Manual Mitsubishi SS Series Engelska PDFHữu Dũng Nguyễn100% (1)
- Slydring GBDocument58 pagesSlydring GBkaniappan sakthivelNo ratings yet
- Hot Water Compare Between Basco and IFCDocument28 pagesHot Water Compare Between Basco and IFCEslam ElsayedNo ratings yet
- Practical Considerations For The Design of Adsorbent BedsDocument10 pagesPractical Considerations For The Design of Adsorbent BedsMariam AsgharNo ratings yet
- Col NDocument7 pagesCol NMohammed SumerNo ratings yet