You might also like
- Tranmission and DesignDocument6 pagesTranmission and DesignKiran Pantha100% (1)
- Transfer FunctionDocument36 pagesTransfer FunctionChamitha MadushanNo ratings yet
- IEEE STD 519 1992vs2014Document50 pagesIEEE STD 519 1992vs2014DaniNurFaruqNo ratings yet
- Wind farm project NPV and LCOE analysisDocument5 pagesWind farm project NPV and LCOE analysisPedro Galvani72% (32)
- K-Factor Transformers Curva de DeratingDocument6 pagesK-Factor Transformers Curva de Deratingapareja007No ratings yet
- 2019 AprilDocument23 pages2019 Aprilkheem esconde100% (1)
- Renewable Energy Systems Full Study GuideDocument2 pagesRenewable Energy Systems Full Study Guidebalafet67% (3)
- EE-260 Lecture 07, 08, 09 TransformerDocument49 pagesEE-260 Lecture 07, 08, 09 TransformerNihal AhmadNo ratings yet
- 4 Distance PDFDocument60 pages4 Distance PDFJaved Ahmed LaghariNo ratings yet
- General Low Voltage Testing MS Rev A 16-02-2010Document3 pagesGeneral Low Voltage Testing MS Rev A 16-02-2010doug2710No ratings yet
- A Comparative Study of Power Supply Architectures in Wireless EV Charging SystemsDocument15 pagesA Comparative Study of Power Supply Architectures in Wireless EV Charging SystemsBalamurugan ParandhamanNo ratings yet
- A Comparative Analysis Bi-Directional DC-DC Converters: of Non-IsolatedDocument6 pagesA Comparative Analysis Bi-Directional DC-DC Converters: of Non-IsolatedTeam RaagNo ratings yet
- A Double-Sided LCC Compensation Network and Its Tuning Method For Wireless Power TransferDocument12 pagesA Double-Sided LCC Compensation Network and Its Tuning Method For Wireless Power TransferShivam AndureNo ratings yet
- Modeling and Analysis of PV Fed DC-DC Converters: P. Maithili, J. Kanakaraj, T.ViswanathanDocument4 pagesModeling and Analysis of PV Fed DC-DC Converters: P. Maithili, J. Kanakaraj, T.ViswanathanVishal KevatNo ratings yet
- An Advanced Switching Harmonic Cancellation Method For A Dual-Generator Power System in More-Electric AircraftDocument13 pagesAn Advanced Switching Harmonic Cancellation Method For A Dual-Generator Power System in More-Electric AircraftSaravana Prakash PNo ratings yet
- A Simplified Matlab Based Simulation of PV Module With Effect of Temperature and IrradiationDocument4 pagesA Simplified Matlab Based Simulation of PV Module With Effect of Temperature and IrradiationerpublicationNo ratings yet
- A Novel Impedance Compensation Method for IPT System Applying Inverse Coupled Current Doubler RectifierDocument4 pagesA Novel Impedance Compensation Method for IPT System Applying Inverse Coupled Current Doubler RectifierzzhbpainNo ratings yet
- DC-DC Converter Implementation With Wide Output Voltage OperationDocument12 pagesDC-DC Converter Implementation With Wide Output Voltage OperationsaptadipNo ratings yet
- DC DC ConverterDocument14 pagesDC DC ConvertersathishNo ratings yet
- A Bidirectional High-Power-Quality Grid Interface With A Novel Bidirectional Noninverted Buck-Boost Converter For PhevsDocument15 pagesA Bidirectional High-Power-Quality Grid Interface With A Novel Bidirectional Noninverted Buck-Boost Converter For PhevsPatil MounicareddyNo ratings yet
- Design and Simulation of Power Factor Correction Boost Converter Using Hysteresis ControlDocument5 pagesDesign and Simulation of Power Factor Correction Boost Converter Using Hysteresis ControlEditor IJTSRDNo ratings yet
- 28 2016 1-A Modified Z-Source Converter Based Single Phase PV Grid Inter-Connected DC Charging Converter For Future Transportation ElectrificationDocument6 pages28 2016 1-A Modified Z-Source Converter Based Single Phase PV Grid Inter-Connected DC Charging Converter For Future Transportation ElectrificationSai RameshNo ratings yet
- Novel ForwardFlyback Hybrid Bidirectional DCDC ConverterDocument7 pagesNovel ForwardFlyback Hybrid Bidirectional DCDC ConverterHsekum RamukNo ratings yet
- 국제 - Design and Control of a Bidirectional Resonant DC-DC Converter for Automotive Engine-Battery Hybrid Power GeneratorsDocument10 pages국제 - Design and Control of a Bidirectional Resonant DC-DC Converter for Automotive Engine-Battery Hybrid Power Generators하미드라힘No ratings yet
- Control Study of Vienna-Type Rectifiers For High DC-link Voltage Utilization and High Power FactorDocument6 pagesControl Study of Vienna-Type Rectifiers For High DC-link Voltage Utilization and High Power Factorgerson gomesNo ratings yet
- IEEE ICIASE 2019: ZVS DC-DC Converter Based on Buck TopologyDocument4 pagesIEEE ICIASE 2019: ZVS DC-DC Converter Based on Buck TopologysuneelNo ratings yet
- 1 s2.0 S0142061522006998 MainDocument18 pages1 s2.0 S0142061522006998 MainAshutosh naikNo ratings yet
- 15 Electric Circuit Analysis: If The Source Is... The Analysis Type Is..Document26 pages15 Electric Circuit Analysis: If The Source Is... The Analysis Type Is..Suresh NikalajeNo ratings yet
- Review of DC-DC Converters in Photovoltaic Systems For MPPT SystemsDocument5 pagesReview of DC-DC Converters in Photovoltaic Systems For MPPT SystemsLuis Angel Garcia ReyesNo ratings yet
- Operational Analysis and Comparative Evaluation of Embedded Z-Source InvertersDocument7 pagesOperational Analysis and Comparative Evaluation of Embedded Z-Source Invertersahmadusman123No ratings yet
- a-high-efficiency-passive-power-factor-corrector-for-singlephaseDocument4 pagesa-high-efficiency-passive-power-factor-corrector-for-singlephaseezloy80No ratings yet
- 2 PDFDocument7 pages2 PDFvijay patilNo ratings yet
- Switched Inductor Based Quadratic ConverterDocument6 pagesSwitched Inductor Based Quadratic ConverterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design Considerations For A Level-2 On-Board PEV Charger Based On Interleaved Boost PFC and LLC Resonant ConvertersDocument8 pagesDesign Considerations For A Level-2 On-Board PEV Charger Based On Interleaved Boost PFC and LLC Resonant ConvertersFaixan ArshadNo ratings yet
- Switched Inductor Z Source Quasi Z SourcDocument6 pagesSwitched Inductor Z Source Quasi Z SourcJebari JebariNo ratings yet
- Improvement of Power Quality of Boost Converter Using Proportional Integral (P-I) ControllerDocument5 pagesImprovement of Power Quality of Boost Converter Using Proportional Integral (P-I) ControllerIJRASETPublicationsNo ratings yet
- Renewable Energy Based On Current Fed Switched Inverter For Smart Grid ApplicationDocument3 pagesRenewable Energy Based On Current Fed Switched Inverter For Smart Grid ApplicationiirNo ratings yet
- Series-Connected DC-DC Power Converters For Low-Voltage DC Source in Distributed GenerationDocument6 pagesSeries-Connected DC-DC Power Converters For Low-Voltage DC Source in Distributed GenerationnaumanaliNo ratings yet
- Performance Evaluation of Interleaved Boost Converter Topologies For Photovoltaic ApplicationsDocument14 pagesPerformance Evaluation of Interleaved Boost Converter Topologies For Photovoltaic Applicationssarvan kumarNo ratings yet
- DC Reactor Type Transformer Inrush Current Limiter PDFDocument7 pagesDC Reactor Type Transformer Inrush Current Limiter PDFalex696No ratings yet
- 1614 FT74664 Design Igbt LCLDocument8 pages1614 FT74664 Design Igbt LCLTiny tinyNo ratings yet
- Design and Simulation of Interleaved SEPIC Converter For Photo Voltaic ApplicationsDocument5 pagesDesign and Simulation of Interleaved SEPIC Converter For Photo Voltaic Applicationsardi taher1991No ratings yet
- Research Article Photovoltaic Simplified Boost Z Source Inverter For Ac Module ApplicationsDocument7 pagesResearch Article Photovoltaic Simplified Boost Z Source Inverter For Ac Module ApplicationsvnrsamyNo ratings yet
- Diode Bridge Rectifier With Improved Power Quality Using Capacitive NetworkDocument6 pagesDiode Bridge Rectifier With Improved Power Quality Using Capacitive NetworkShashi ShekharNo ratings yet
- Selection of Semiconductor Devices For DABDocument4 pagesSelection of Semiconductor Devices For DABBob HabNo ratings yet
- Field Submission Abstract File2Document6 pagesField Submission Abstract File2Adian HerawanNo ratings yet
- VtfailDocument12 pagesVtfailMohd AlghunimatNo ratings yet
- DC Ground Fault AnalysisDocument1 pageDC Ground Fault Analysisalvin meNo ratings yet
- CAP.4. Conv. DC-DC Cu IzolareDocument9 pagesCAP.4. Conv. DC-DC Cu IzolareCondracheClaudiaNo ratings yet
- Single Phase Grid Interconnected High Gain Boost Converter With Soft Switching CapabilityDocument13 pagesSingle Phase Grid Interconnected High Gain Boost Converter With Soft Switching CapabilityInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- Introduction To Power: Unit - 1 ElectronicsDocument41 pagesIntroduction To Power: Unit - 1 ElectronicsDevi Debora SiregarNo ratings yet
- A 25 KW Industrial Prototype Wireless Electric Vehicle ChargerDocument6 pagesA 25 KW Industrial Prototype Wireless Electric Vehicle Chargerabhinandan.kumarNo ratings yet
- Paper 5Document12 pagesPaper 5headerwebNo ratings yet
- Design and Simulation of Boost Converter Using P & O Technique For PV SystemDocument5 pagesDesign and Simulation of Boost Converter Using P & O Technique For PV SystemVishal KevatNo ratings yet
- Toward Power Quality Management in Hybrid AC-DC Microgrid Using LTC-L Utility Interactive Inverter: Load Voltage-Grid Current TradeoffDocument11 pagesToward Power Quality Management in Hybrid AC-DC Microgrid Using LTC-L Utility Interactive Inverter: Load Voltage-Grid Current TradeoffSivaguruNo ratings yet
- Synchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Document5 pagesSynchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Rick MaityNo ratings yet
- Reducing Neutral-Point Voltage Fluctuation in NPC Three-Level Active Power FiltersDocument12 pagesReducing Neutral-Point Voltage Fluctuation in NPC Three-Level Active Power FiltersSalem SaidiNo ratings yet
- Lab 12 Gyrator GuideDocument11 pagesLab 12 Gyrator GuideJulio César GuardiolaNo ratings yet
- Advanced Power Electronics System: Yoseph MekonnenDocument41 pagesAdvanced Power Electronics System: Yoseph Mekonnenhabte gebreial shrashrNo ratings yet
- Single Phase AC To AC Conversion Without Frequency RestrictionsDocument4 pagesSingle Phase AC To AC Conversion Without Frequency RestrictionsTaniyaNo ratings yet
- Particle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterDocument5 pagesParticle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterjamesNo ratings yet
- Simulation of Single Phase Full Wave RectifiersDocument11 pagesSimulation of Single Phase Full Wave RectifiersHahahNo ratings yet
- JESTEC PaperDocument12 pagesJESTEC PaperMurali NarayanamurthyNo ratings yet
- 22223.BEE Tutorial Sheet 1 (Semiconductor Diodes and Applications)Document2 pages22223.BEE Tutorial Sheet 1 (Semiconductor Diodes and Applications)Rajiv SatijaNo ratings yet
- A Solar Powered Reconfigurable Inverter Topology For Ac/Dc Home With Fuzzy Logic ControllerDocument6 pagesA Solar Powered Reconfigurable Inverter Topology For Ac/Dc Home With Fuzzy Logic ControllerTushar MukherjeeNo ratings yet
- Design of Igbt Based LLC Resonant InverterDocument7 pagesDesign of Igbt Based LLC Resonant InverterdhruvNo ratings yet
- Industrial Electronic Module BDocument15 pagesIndustrial Electronic Module BYamburger LoveNo ratings yet
- Power Factor Correction Using Single PhaseDocument5 pagesPower Factor Correction Using Single PhaseSatya NVNo ratings yet
- Automatic Frequency Tuning Improves Wireless EV Charging EfficiencyDocument10 pagesAutomatic Frequency Tuning Improves Wireless EV Charging EfficiencybalafetNo ratings yet
- Unit-4 InvertersDocument43 pagesUnit-4 InvertersbalafetNo ratings yet
- A Large Air Gap 3kW Wireless Power Transfer System For Electric VehDocument6 pagesA Large Air Gap 3kW Wireless Power Transfer System For Electric VehbalafetNo ratings yet
- Engg Ethics Lec Notes - 2020 - Opt - 1Document43 pagesEngg Ethics Lec Notes - 2020 - Opt - 1balafetNo ratings yet
- EE8552 Unit-5Document48 pagesEE8552 Unit-5balafetNo ratings yet
- It Is Defined As Conversion of Fixed AC Power Into Variable AC Power With Change in FrequencyDocument10 pagesIt Is Defined As Conversion of Fixed AC Power Into Variable AC Power With Change in FrequencybalafetNo ratings yet
- Dual Converter: A Rectifier (Converts AC To DC)Document8 pagesDual Converter: A Rectifier (Converts AC To DC)balafetNo ratings yet
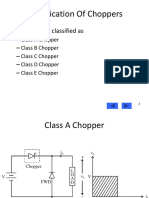
- Classification of Choppers: - Choppers Are Classified AsDocument30 pagesClassification of Choppers: - Choppers Are Classified AskanithanNo ratings yet
- 100 KW Solar Plant LayoutDocument1 page100 KW Solar Plant LayoutbalafetNo ratings yet
- Temple Tank AlgaeDocument56 pagesTemple Tank AlgaeGopalakrishnan MohanNo ratings yet
- Air Core Inductance Value Variation With Number of Turns and Diameter of Wire, Length and Diameter of Core PDFDocument50 pagesAir Core Inductance Value Variation With Number of Turns and Diameter of Wire, Length and Diameter of Core PDFbalafetNo ratings yet
- Biodegradation Using Microbes: Dr.T.V.Poonguzhali Department of Botany Queen Mary's College, Chennai-4Document20 pagesBiodegradation Using Microbes: Dr.T.V.Poonguzhali Department of Botany Queen Mary's College, Chennai-4Preethi GopalanNo ratings yet
- Man and MicrobesDocument73 pagesMan and MicrobesGopalakrishnan MohanNo ratings yet
- Air Core Inductance Value Variation With Number of Turns and Diameter of Wire, Length and Diameter of Core PDFDocument50 pagesAir Core Inductance Value Variation With Number of Turns and Diameter of Wire, Length and Diameter of Core PDFbalafetNo ratings yet
- 3 How Is Leakage Inductance Measured PDFDocument3 pages3 How Is Leakage Inductance Measured PDFbalafetNo ratings yet
- Power Electronics For SolarDocument9 pagesPower Electronics For SolarbalafetNo ratings yet
- EE6604 Design of Electrical Machines. Unit-1 NotesDocument17 pagesEE6604 Design of Electrical Machines. Unit-1 NotesbalafetNo ratings yet
- Tutorial Unit 2 DEMDocument2 pagesTutorial Unit 2 DEMbalafetNo ratings yet
- Capacitor Power Supply CircuitDocument7 pagesCapacitor Power Supply CircuitMISHALSAGARNo ratings yet
- Power TriangleDocument7 pagesPower TriangleKrishna MurariNo ratings yet
- RF Coil TutorialDocument45 pagesRF Coil TutorialAhmed Diaa AlwakilNo ratings yet
- bt3114 Part2 14 11 09rahulDocument38 pagesbt3114 Part2 14 11 09rahulSwathi ChinnuNo ratings yet
- LecturasDocument260 pagesLecturasJimLlaiquiNo ratings yet
- Technical Specification of PLCC: Wbsetcl Page - 1/26 Battery ChargerDocument26 pagesTechnical Specification of PLCC: Wbsetcl Page - 1/26 Battery ChargerpvenkyNo ratings yet
- Physics II Problems PDFDocument1 pagePhysics II Problems PDFBOSS BOSSNo ratings yet
- TN System - Protection Against Indirect Contact - Electrical Installation GuideDocument4 pagesTN System - Protection Against Indirect Contact - Electrical Installation GuideRajendra Prasad ShuklaNo ratings yet
- Doble - Symmetrical Type Phase Shifting Transformers Basic Relay Protection PDFDocument25 pagesDoble - Symmetrical Type Phase Shifting Transformers Basic Relay Protection PDFsulemankhalidNo ratings yet
- K.S.Rangasamy College of Technology, Tiruchengode - 637 215Document2 pagesK.S.Rangasamy College of Technology, Tiruchengode - 637 215Hariesh WaranNo ratings yet
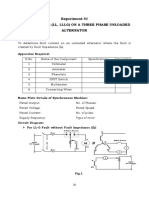
- 6.fault Analysis (LL, LLLG) On A Three Phase Unloaded AlternatorDocument4 pages6.fault Analysis (LL, LLLG) On A Three Phase Unloaded Alternatorarjuna4306No ratings yet
- IV B.Tech I Semester Regular/Supplementary Examinations, October/November - 2017 Electrical Distribution SystemsDocument8 pagesIV B.Tech I Semester Regular/Supplementary Examinations, October/November - 2017 Electrical Distribution Systemssai likithaNo ratings yet
- Synchronous Motors ExplainedDocument2 pagesSynchronous Motors ExplainedJunior BolañosNo ratings yet
- OMNIA2 MDocument251 pagesOMNIA2 MRier LabNo ratings yet
- Mahadi Bin HassanDocument38 pagesMahadi Bin HassanLalNo ratings yet
- Chapter 11 - AC Steady-State PowerDocument63 pagesChapter 11 - AC Steady-State PowerGeoFurriel100% (1)
- Kew 1020R Digital MultimeterDocument1 pageKew 1020R Digital Multimeterwanna_acNo ratings yet
- SEO PV AnalyzerDocument5 pagesSEO PV AnalyzerPrecisionNo ratings yet
- BJT Electronics Chapter on Transistor OperationDocument68 pagesBJT Electronics Chapter on Transistor Operationeng4008No ratings yet
- Koteeswaran, MythiliDocument79 pagesKoteeswaran, MythilimadhavanssnNo ratings yet
- 07 - Alternating CurrentDocument15 pages07 - Alternating CurrentKindman KindmanNo ratings yet
- Hamyoung Rele Estado Solido PDFDocument2 pagesHamyoung Rele Estado Solido PDFEdison Benjamin Consuegra ChalenNo ratings yet
- Current Distribution of Single Core Cable On Metal TrayDocument7 pagesCurrent Distribution of Single Core Cable On Metal TrayChern Ruey LimNo ratings yet