You might also like
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- CAN Bus DiagnosticoDocument29 pagesCAN Bus DiagnosticoaimerNo ratings yet
- Interlocking Scheme Transmission Dept PDFDocument40 pagesInterlocking Scheme Transmission Dept PDFSergio Henrique F. CArniettoNo ratings yet
- Investigating Science: PearsonDocument29 pagesInvestigating Science: PearsonnatsdorfNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Diagrama Electrico Caterpillar 433e, AsrDocument10 pagesDiagrama Electrico Caterpillar 433e, AsrEdwin Carrera100% (2)
- Parts MRP7000Document324 pagesParts MRP7000Bashir AhmedNo ratings yet
- Mig 100 Welder ManualDocument14 pagesMig 100 Welder Manualtanaka1000100% (1)
- Atwater Kent 40-42-52-56-57 SchematicsDocument1 pageAtwater Kent 40-42-52-56-57 SchematicsEdd WhatleyNo ratings yet
- Protection FundamentalsDocument84 pagesProtection Fundamentalsعزو عبدالكريم100% (1)
- Rencana Anggaran Biaya (Rab) : Harga Satuan Jumlah (RP) (RP) Vii. Tata Suara NO Uraian Pekerjaan SATDocument3 pagesRencana Anggaran Biaya (Rab) : Harga Satuan Jumlah (RP) (RP) Vii. Tata Suara NO Uraian Pekerjaan SATNino NinosNo ratings yet
- vc33 Kopl Kurzba eDocument1 pagevc33 Kopl Kurzba eSafetyjoe2No ratings yet
- HA122 DatasheetDocument52 pagesHA122 DatasheetAndi Awal JanwarNo ratings yet
- BUV48, BUV48A NPN Silicon Power TransistorsDocument6 pagesBUV48, BUV48A NPN Silicon Power TransistorsWellison RodriguesNo ratings yet
- BUV47, BUV47A NPN Silicon Power TransistorsDocument8 pagesBUV47, BUV47A NPN Silicon Power Transistorsalex rodriguezNo ratings yet
- Job Sheet UKK 2021 - JOB 3Document4 pagesJob Sheet UKK 2021 - JOB 3Aji SafariNo ratings yet
- BDX53B - BDX53C BDX54B - BDX54C: Complementary Power Darlington TransistorsDocument7 pagesBDX53B - BDX53C BDX54B - BDX54C: Complementary Power Darlington TransistorsqubaliNo ratings yet
- BDX53B - BDX53C BDX54B - BDX54C: Complementary Power Darlington TransistorsDocument7 pagesBDX53B - BDX53C BDX54B - BDX54C: Complementary Power Darlington TransistorsOscar VazquesNo ratings yet
- BUV48, BUV48A NPN Silicon Power TransistorsDocument7 pagesBUV48, BUV48A NPN Silicon Power TransistorsKemboya LuigiNo ratings yet
- Cat BSP BSC IngDocument3 pagesCat BSP BSC IngLeandro Francisco da SilvaNo ratings yet
- Unisonic Technologies Co., LTD: High-Output Dual Power AmplifierDocument7 pagesUnisonic Technologies Co., LTD: High-Output Dual Power AmplifierRobertoNo ratings yet
- KA2206B (12v)Document3 pagesKA2206B (12v)James DvNo ratings yet
- TB2959HQ Datasheet en 20111108Document24 pagesTB2959HQ Datasheet en 20111108Chawki DerouicheNo ratings yet
- Data Sheet: 74HCT9046ADocument40 pagesData Sheet: 74HCT9046AbezasamiNo ratings yet
- PNP Silicon AF Transistors: BCX51... BCX53Document5 pagesPNP Silicon AF Transistors: BCX51... BCX53José AdelinoNo ratings yet
- HA12216F/HA12221F Series: Audio Signal Processor For Car Deck (Decode Only Dolby B Type NR With PB Amp.)Document53 pagesHA12216F/HA12221F Series: Audio Signal Processor For Car Deck (Decode Only Dolby B Type NR With PB Amp.)mizanNo ratings yet
- MJ 2955Document4 pagesMJ 2955Lilik Sunarko SunarjiNo ratings yet
- Complementary Silicon Power Transistors (15A / 60V / 115W) : MJ2955 (PNP) 2N3055 (NPN)Document4 pagesComplementary Silicon Power Transistors (15A / 60V / 115W) : MJ2955 (PNP) 2N3055 (NPN)fafaNo ratings yet
- EE311 Analog Electronics Final Q1) (15 PTS.) A Class-A Emitter Follower Biased With A Constant Current Source Is Given in TheDocument6 pagesEE311 Analog Electronics Final Q1) (15 PTS.) A Class-A Emitter Follower Biased With A Constant Current Source Is Given in TheburakNo ratings yet
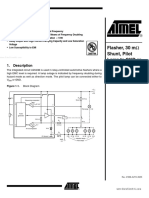
- Flasher, 30 M Shunt, Pilot Lamp To GND or V U2043B: FeaturesDocument10 pagesFlasher, 30 M Shunt, Pilot Lamp To GND or V U2043B: FeaturesVladimirNo ratings yet
- TA7774P, TA7774F: Stepping Motor Driver IcDocument12 pagesTA7774P, TA7774F: Stepping Motor Driver IcJavier CuraNo ratings yet
- ATS177 Hall Effect DatasheetDocument10 pagesATS177 Hall Effect DatasheetAnonymous oyUAtpKNo ratings yet
- DB3 /DB4 / DC34: Trigger DiodesDocument6 pagesDB3 /DB4 / DC34: Trigger DiodesMarck SolterNo ratings yet
- Delta AC Servo Drive & Motor ASDA-B3 Series: Automation For A Changing WorldDocument30 pagesDelta AC Servo Drive & Motor ASDA-B3 Series: Automation For A Changing WorldTRITRONIX INDUSTRIAL SOLUTIONNo ratings yet
- HCF4063B: 4-Bit Magnitude ComparatorDocument9 pagesHCF4063B: 4-Bit Magnitude ComparatorHarish YadavNo ratings yet
- 2SC460, 2SC461: Silicon NPN Epitaxial PlanarDocument9 pages2SC460, 2SC461: Silicon NPN Epitaxial PlanarAlir AlichyNo ratings yet
- 2SD1133, 2SD1134: Silicon NPN Triple DiffusedDocument3 pages2SD1133, 2SD1134: Silicon NPN Triple DiffusedtimNo ratings yet
- Silicon NPN Transistors: BDP947 - BDP949 - BDP953Document8 pagesSilicon NPN Transistors: BDP947 - BDP949 - BDP953rolandseNo ratings yet
- D 882Document1 pageD 882GlennNo ratings yet
- Datasheet DiacDocument4 pagesDatasheet DiacOrlandoTobonNo ratings yet
- 2SD669, 2SD669A: Silicon NPN EpitaxialDocument5 pages2SD669, 2SD669A: Silicon NPN EpitaxialAliMudofarNo ratings yet
- Transmisor TV 150wattDocument30 pagesTransmisor TV 150wattRicardo SuarezNo ratings yet
- TB6674FAG ToshibaDocument18 pagesTB6674FAG ToshibalucianassisNo ratings yet
- An7112 1 PDFDocument3 pagesAn7112 1 PDFAnonymous PhIAiGKYyKNo ratings yet
- Unisonic Technologies Co., LTD: Low Frequency TransistorDocument4 pagesUnisonic Technologies Co., LTD: Low Frequency TransistorWee Chuan PoonNo ratings yet
- Transistor (NPN) : 1. EmitterDocument2 pagesTransistor (NPN) : 1. EmitterNatalia KuklinaNo ratings yet
- Transistor (NPN) : 1. EmitterDocument2 pagesTransistor (NPN) : 1. EmitterAlul ScratchNo ratings yet
- 2 SC 5103Document8 pages2 SC 5103ALFREDO MORALESNo ratings yet
- BD235 BD237: Low Voltage NPN Power TransistorsDocument9 pagesBD235 BD237: Low Voltage NPN Power TransistorssuppoNo ratings yet
- Diodo-DB3 5T PDFDocument4 pagesDiodo-DB3 5T PDFPaulo Roberto100% (1)
- TDA8947J PhilipsSemiconductorsDocument24 pagesTDA8947J PhilipsSemiconductorsyogesh panchalNo ratings yet
- Data Sheet: Part No. Package Code No. HSOP056-P-0300ADocument32 pagesData Sheet: Part No. Package Code No. HSOP056-P-0300Aความรักยิ่งใหญ่ เหนือสิ่งอื่นใดNo ratings yet
- BU406Document5 pagesBU406Ahmed ZagharyNo ratings yet
- NPN Plastic-Encapsulate Transistors: Lead (PB) - FreeDocument2 pagesNPN Plastic-Encapsulate Transistors: Lead (PB) - Freellargo007No ratings yet
- C1815, NPN TransistorDocument2 pagesC1815, NPN Transistorabcx769No ratings yet
- NPN BD136 - BD138 - BD140 Silicon Planar Epitaxial Power TransistorsDocument3 pagesNPN BD136 - BD138 - BD140 Silicon Planar Epitaxial Power TransistorsAmc Forklift ElektrikNo ratings yet
- Dual Audio Power Amplifier: FeaturesDocument12 pagesDual Audio Power Amplifier: FeaturesMarcos YanezNo ratings yet
- 74F85 4-Bit Magnitude Comparator: Features Pin ConfigurationDocument3 pages74F85 4-Bit Magnitude Comparator: Features Pin ConfigurationMaykerr MontoyaNo ratings yet
- 2SD1555 SaventICDocument3 pages2SD1555 SaventICcarlosheriberplazNo ratings yet
- BUW48 BUW49: High Power NPN Silicon TransistorsDocument3 pagesBUW48 BUW49: High Power NPN Silicon TransistorsGaith Ghaleb SharabatiNo ratings yet
- Foshan Blue Rocket Elec 2N2222A - C358533Document6 pagesFoshan Blue Rocket Elec 2N2222A - C358533mrahNo ratings yet
- TDA1518BQDocument11 pagesTDA1518BQahmedNo ratings yet
- Put PDFDocument2 pagesPut PDFEliasNo ratings yet
- High Power NPN Epitaxial Planar Bipolar Transistor: FeaturesDocument8 pagesHigh Power NPN Epitaxial Planar Bipolar Transistor: FeaturesAlejandro AGDvintageNo ratings yet
- 2N2646, 2N2647Document2 pages2N2646, 2N2647Claudio JuanNo ratings yet
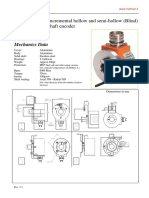
- Features: Mechanical DataDocument2 pagesFeatures: Mechanical DataFida HussainNo ratings yet
- Ac Motor Drive Operation ManualDocument176 pagesAc Motor Drive Operation ManualFida HussainNo ratings yet
- SIMOVERT P Rectifier Unit Sizes C To KDocument244 pagesSIMOVERT P Rectifier Unit Sizes C To KFida HussainNo ratings yet
- 6se7014 AlarmDocument27 pages6se7014 AlarmFida HussainNo ratings yet
- Single Schmitt-Trigger Buffer: FeaturesDocument26 pagesSingle Schmitt-Trigger Buffer: FeaturesFida HussainNo ratings yet
- TNP50UDocument2 pagesTNP50UFida HussainNo ratings yet
- Midterm 2013 SolutionDocument5 pagesMidterm 2013 SolutionArunabh BhattacharyaNo ratings yet
- Tutorial HFSS 1Document11 pagesTutorial HFSS 1coolpixs4No ratings yet
- Notes On TransformerDocument2 pagesNotes On TransformerasdfNo ratings yet
- Photodiodes, Phototransistors DataBookDocument160 pagesPhotodiodes, Phototransistors DataBookJosé ÁlvarezNo ratings yet
- JVC AV-21LS2, LX2 Schematics DiagramDocument11 pagesJVC AV-21LS2, LX2 Schematics DiagramshrekNo ratings yet
- SIPROTEC 7SJ82 ProfileDocument2 pagesSIPROTEC 7SJ82 ProfilePrje AccNo ratings yet
- Zelio ManualDocument90 pagesZelio Manualrubnr7100% (1)
- EMP ReportDocument47 pagesEMP ReportKelly VillarrealNo ratings yet
- PW TD Mig Mag enDocument81 pagesPW TD Mig Mag enAjmi AmineNo ratings yet
- How To Calculate With Current Divider Rule FormulaDocument10 pagesHow To Calculate With Current Divider Rule FormulajackNo ratings yet
- Gleh1642fs 31 Cu FT Laundry CenterDocument20 pagesGleh1642fs 31 Cu FT Laundry Centeredison mauricio alarcon acostaNo ratings yet
- Karnataka Electricity (Taxation On Consumption) Act, 1959Document24 pagesKarnataka Electricity (Taxation On Consumption) Act, 1959Latest Laws TeamNo ratings yet
- HCD-DX90 v1 (1) .0Document66 pagesHCD-DX90 v1 (1) .0Valmir BarbosaNo ratings yet
- 8251 UsartDocument21 pages8251 UsartVanmathi MNo ratings yet
- D44H Series (NPN), D45Hseries (PNP) Complementary Silicon Power TransistorsDocument5 pagesD44H Series (NPN), D45Hseries (PNP) Complementary Silicon Power TransistorsPedro LuisNo ratings yet
- Hev Course WorkDocument2 pagesHev Course WorkAmey SonawaneNo ratings yet
- 7ug TMR CatalogDocument16 pages7ug TMR CatalogAkhil ChoureNo ratings yet
- r7008sb ManualDocument2 pagesr7008sb ManualgrsilveiraNo ratings yet
- OLI WOLONG Vibrator"sDocument8 pagesOLI WOLONG Vibrator"sRinatNo ratings yet
- High-Voltage Vacuum ContactorsDocument9 pagesHigh-Voltage Vacuum ContactorstanujaayerNo ratings yet
- Lionfish High Speed Layout Guidelines: Revision 0.0Document38 pagesLionfish High Speed Layout Guidelines: Revision 0.0Basel TahboubNo ratings yet