You might also like
- DC Motor Lab ReportDocument9 pagesDC Motor Lab ReportErick OderoNo ratings yet
- Experiment No 12 A-Motor Speed and Input Characteristics: ObjectiveDocument8 pagesExperiment No 12 A-Motor Speed and Input Characteristics: ObjectiveMehak MubarikNo ratings yet
- Lab ReportDocument10 pagesLab ReportErick OderoNo ratings yet
- Speed ControlDocument10 pagesSpeed Controlعبدالله قيس محمود الحيدريNo ratings yet
- Prepared By: Luis Fernando Montoya Chun-Ju Huang Ashish K. SolankiDocument33 pagesPrepared By: Luis Fernando Montoya Chun-Ju Huang Ashish K. SolankigouravNo ratings yet
- Servo ED 4R Instruction ManualDocument68 pagesServo ED 4R Instruction Manual1301041019No ratings yet
- Rsd110-6 Stepping Motor Driver ManualDocument14 pagesRsd110-6 Stepping Motor Driver ManualAziz Nihat GürsoyNo ratings yet
- DC Motor Transient Response Lab ReportDocument9 pagesDC Motor Transient Response Lab ReportErick OderoNo ratings yet
- PDF Created With Pdffactory Trial VersionDocument16 pagesPDF Created With Pdffactory Trial VersionRubenNo ratings yet
- Lift Trucks: MCFA Document # Issue DateDocument2 pagesLift Trucks: MCFA Document # Issue DateChristian BedoyaNo ratings yet
- Experimental Lab No. 1 DC MotorsDocument9 pagesExperimental Lab No. 1 DC MotorscfellowNo ratings yet
- Remote Lab Experiment Final FileDocument11 pagesRemote Lab Experiment Final FileShiva Kumar RNo ratings yet
- DC Motor Speed Control System - ED4400BDocument14 pagesDC Motor Speed Control System - ED4400BDanang Pradika Purnomo100% (1)
- Exp 7Document11 pagesExp 7John Renzel RiveraNo ratings yet
- Me 2209 Electrical Engineering Lab Manua EitlDocument45 pagesMe 2209 Electrical Engineering Lab Manua EitlRagunathan NarayananNo ratings yet
- Sofware Functions Related To Hydraulic Iecu EqippedDocument6 pagesSofware Functions Related To Hydraulic Iecu Eqippedqwureyquwery100% (3)
- Ac Position Control Trainer ManualDocument7 pagesAc Position Control Trainer ManualSHANKARNo ratings yet
- ACS Analogue Control Systems eDocument12 pagesACS Analogue Control Systems eKhaled KamelNo ratings yet
- Tip23 e PDFDocument4 pagesTip23 e PDFThanh BaronNo ratings yet
- Me 2209 Electrical Engineering Lab ManualDocument45 pagesMe 2209 Electrical Engineering Lab ManualSai Karthi100% (1)
- B Done Group 408 - Short Report - Angular Speed ControlDocument9 pagesB Done Group 408 - Short Report - Angular Speed ControlMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- Daf EupDocument144 pagesDaf EupDenis Shihskoff100% (1)
- AC Drive Theory and Application: Benefits of Using AC DrivesDocument8 pagesAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiNo ratings yet
- Regenerative Braking of BLDC MotorsDocument21 pagesRegenerative Braking of BLDC Motorsalthaf hussainNo ratings yet
- The Efficiency of DC Shunt Motor (Load Test Characteristic)Document5 pagesThe Efficiency of DC Shunt Motor (Load Test Characteristic)Ginallie MechureNo ratings yet
- Control Lab Report Experiment No. 02Document10 pagesControl Lab Report Experiment No. 02Nahin AminNo ratings yet
- Engineering Lab 5 Machine Lab Lab 1 ReportDocument9 pagesEngineering Lab 5 Machine Lab Lab 1 Reportram010No ratings yet
- Control Exp 1 Student ManualDocument5 pagesControl Exp 1 Student ManualMohammad Bony IsrailNo ratings yet
- Telemecanique Altivar16 ManualDocument18 pagesTelemecanique Altivar16 ManualmrtansNo ratings yet
- 2016 SB03 Troubleshooting 12 V14 TAGECDcircuitDocument10 pages2016 SB03 Troubleshooting 12 V14 TAGECDcircuitAadarsh ReddyNo ratings yet
- Experiment-3 Lab ManualDocument4 pagesExperiment-3 Lab ManualShivam YadavNo ratings yet
- EES340 Lab07 Group3a2Document13 pagesEES340 Lab07 Group3a2D 9No ratings yet
- 1400-0100 enDocument3 pages1400-0100 enKopi BrisbaneNo ratings yet
- 5 Part2-1520417690Document6 pages5 Part2-1520417690rastgonikoNo ratings yet
- User's Guide: Using The UCC28950EVM-442Document28 pagesUser's Guide: Using The UCC28950EVM-442UTMNo ratings yet
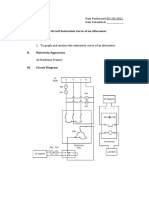
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- Stepper Motor TutorialDocument6 pagesStepper Motor TutorialengrodeNo ratings yet
- Pre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationDocument11 pagesPre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationtrebeardNo ratings yet
- Control LabDocument61 pagesControl LabIhsan AteyaNo ratings yet
- Experiment 3 (Control)Document6 pagesExperiment 3 (Control)BreezyAxNo ratings yet
- Tip22 e PDFDocument6 pagesTip22 e PDFThanh BaronNo ratings yet
- Control System Lab ManualDocument52 pagesControl System Lab ManualMohammad Umar RehmanNo ratings yet
- 110 CFM Compressor - VFD SettingsDocument17 pages110 CFM Compressor - VFD Settingssantosh reddy dundigalNo ratings yet
- Practical Set-Up IEE112Document6 pagesPractical Set-Up IEE112Karim MuhammedNo ratings yet
- Direct Load Test On A DC Shunt MotorDocument5 pagesDirect Load Test On A DC Shunt MotorYAKALA RAVIKUMARNo ratings yet
- Circuit Diagram: U19Ee306 - Electrical Machines - I LaboratoryDocument16 pagesCircuit Diagram: U19Ee306 - Electrical Machines - I LaboratorySanthoshNo ratings yet
- Accel500 Speedlooptuning SWDocument15 pagesAccel500 Speedlooptuning SWAsz TechNo ratings yet
- Off Grid Workshop Participant GuideDocument3 pagesOff Grid Workshop Participant GuideOscar Kelvin NsituNo ratings yet
- EE206: Electromechanics LabDocument9 pagesEE206: Electromechanics LabRahul ChaudharyNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- AEM Series 2 EMS Setup Notes - Advanced BoostDocument5 pagesAEM Series 2 EMS Setup Notes - Advanced BoostMauro GalloNo ratings yet
- Experiment 2Document5 pagesExperiment 2Sakshi GargNo ratings yet
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocument21 pagesElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNo ratings yet
- Must Be Set.: Set As Required.: Parameter NumberDocument9 pagesMust Be Set.: Set As Required.: Parameter NumberMetodi NacevNo ratings yet
- ETS Series AC Servo User's Manual: Version V1.06Document144 pagesETS Series AC Servo User's Manual: Version V1.06Joimir PerezNo ratings yet
- Expt 6 The Split Phase MotorDocument4 pagesExpt 6 The Split Phase MotorCapalar KyleNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Signal Midterm Solution 2018Document14 pagesSignal Midterm Solution 2018Rohaan a.k.a HoneyNo ratings yet
- Signal Paper 163Document15 pagesSignal Paper 163Rohaan a.k.a HoneyNo ratings yet
- Mamoona Anwar@umt Edu PKDocument1 pageMamoona Anwar@umt Edu PKRohaan a.k.a HoneyNo ratings yet
- Vol 16 #3Document3 pagesVol 16 #3Rohaan a.k.a HoneyNo ratings yet
- Lecture 02Document44 pagesLecture 02Rohaan a.k.a HoneyNo ratings yet
- Element 4 Report: Importance of Financial ManagementDocument5 pagesElement 4 Report: Importance of Financial ManagementRohaan a.k.a HoneyNo ratings yet
- JournalsDocument12 pagesJournalsRohaan a.k.a HoneyNo ratings yet
- Hbridge Reference Ualberta ArvpDocument13 pagesHbridge Reference Ualberta ArvpRohaan a.k.a HoneyNo ratings yet
- Component 3 Case Study: Change in Organizational Culture at JaguarDocument4 pagesComponent 3 Case Study: Change in Organizational Culture at JaguarRohaan a.k.a HoneyNo ratings yet
- Lab 5,6Document15 pagesLab 5,6Rohaan a.k.a HoneyNo ratings yet
- Element 3 Case Study: Change in Organizational Culture at JaguarDocument4 pagesElement 3 Case Study: Change in Organizational Culture at JaguarRohaan a.k.a HoneyNo ratings yet
- Digital Signal Processing: Filter DesignDocument6 pagesDigital Signal Processing: Filter DesignRohaan a.k.a HoneyNo ratings yet
- Project Report On Band Pass Filter: Subject: Signals and Systems LabDocument8 pagesProject Report On Band Pass Filter: Subject: Signals and Systems LabRohaan a.k.a HoneyNo ratings yet
- Linear Control Systems Lab Manual: Closed Loop Position ControllerDocument4 pagesLinear Control Systems Lab Manual: Closed Loop Position ControllerRohaan a.k.a HoneyNo ratings yet
- Element 3 Case Study: Change in Organizational Culture at JaguarDocument4 pagesElement 3 Case Study: Change in Organizational Culture at JaguarRohaan a.k.a HoneyNo ratings yet
- Element 3 Case Study: Change in Organizational Culture at JaguarDocument3 pagesElement 3 Case Study: Change in Organizational Culture at JaguarRohaan a.k.a HoneyNo ratings yet
- Linear Control Systems Lab Manual: Lab # 7 Implementation of Closed Loop Motor Speed Control in SimulinkDocument6 pagesLinear Control Systems Lab Manual: Lab # 7 Implementation of Closed Loop Motor Speed Control in SimulinkRohaan a.k.a HoneyNo ratings yet
- Project Report: Controlling Speed and Direction of Motor Using H-BridgeDocument10 pagesProject Report: Controlling Speed and Direction of Motor Using H-BridgeRohaan a.k.a HoneyNo ratings yet
- Universal Fluid Power TrainerDocument8 pagesUniversal Fluid Power TrainerElias80No ratings yet
- Chittagong Independent University: Live-In Field Experience (LFE) PresentationDocument23 pagesChittagong Independent University: Live-In Field Experience (LFE) PresentationMd. SazzadNo ratings yet
- Valves BasicsDocument94 pagesValves BasicsSamuel Onyewuenyi100% (1)
- Axial Piston Variable Motor A6VM Series 71: G Max G MinDocument76 pagesAxial Piston Variable Motor A6VM Series 71: G Max G MinDejan0% (1)
- Geared MotorsDocument477 pagesGeared MotorsmacNo ratings yet
- Tunnel Thrusters: Speeds Your PerformanceDocument6 pagesTunnel Thrusters: Speeds Your PerformanceKelvin XuNo ratings yet
- Workshop Practice DrillDocument6 pagesWorkshop Practice DrillMuhammad Zaid KhanNo ratings yet
- Series E-1510: Base Mounted Centrifugal Pump Performance Curves - 60 HZDocument44 pagesSeries E-1510: Base Mounted Centrifugal Pump Performance Curves - 60 HZDiego Plata VasquezNo ratings yet
- VNHD7008AY: H-Bridge Motor Driver For Automotive DC Motor DrivingDocument44 pagesVNHD7008AY: H-Bridge Motor Driver For Automotive DC Motor DrivingFırat Dede (Robotus)No ratings yet
- RE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersDocument1 pageRE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersWALTER ANDRES CORDOBA CACERENo ratings yet
- Motor: Permanent Magnet DC 2-Wire Reversible Connection Diagram 07410101Document2 pagesMotor: Permanent Magnet DC 2-Wire Reversible Connection Diagram 07410101NavneetGargNo ratings yet
- Stepper MotorDocument20 pagesStepper MotorswapnilNo ratings yet
- Audi S8 SpecsDocument106 pagesAudi S8 SpecsMarwan NachawatyNo ratings yet
- DC Machines Part IDocument10 pagesDC Machines Part IDipti Ranjan SahooNo ratings yet
- Mechatronics Mini Report 1 PDFDocument15 pagesMechatronics Mini Report 1 PDFishworNo ratings yet
- DC Motor PrimerDocument26 pagesDC Motor PrimerastroltravlerNo ratings yet
- Subjective Questions: Introduction of Electric Pump, Dol Starter, and InverterDocument16 pagesSubjective Questions: Introduction of Electric Pump, Dol Starter, and InverterMartin De Boras PragashNo ratings yet
- KSB PumpsDocument56 pagesKSB Pumpskamran mamedovNo ratings yet
- How To Control A VFD With A PLC - Part 4 (Configuring Motor Data in The Siemens Starter Software) - RealParsDocument24 pagesHow To Control A VFD With A PLC - Part 4 (Configuring Motor Data in The Siemens Starter Software) - RealParsJemerald MagtanongNo ratings yet
- Btech Final Year Project Report PDFDocument25 pagesBtech Final Year Project Report PDFShaiz AkhtarNo ratings yet
- Vibro Compactador Cs 54Document16 pagesVibro Compactador Cs 54ricsnikNo ratings yet
- Schneider Electric Lexium LMX23 Product ManualDocument338 pagesSchneider Electric Lexium LMX23 Product ManualJuan GuzmanNo ratings yet
- MITSUBISHI FR CS80 Instruction ManualDocument246 pagesMITSUBISHI FR CS80 Instruction ManualLaurentiu LapusescuNo ratings yet
- Fan Motor D155ax-6 Lmf75 Test 50495Document12 pagesFan Motor D155ax-6 Lmf75 Test 50495Interclima SpaNo ratings yet
- PWM Based DC Motor Speed ControlDocument76 pagesPWM Based DC Motor Speed ControlEr Meghvrat AryaNo ratings yet
- FALK Reducers PDFDocument11 pagesFALK Reducers PDFangel017No ratings yet
- Proses Pemesinan: CNC Technology and CNC ProgrammingDocument72 pagesProses Pemesinan: CNC Technology and CNC ProgrammingAmin HidayatullohNo ratings yet
- BET PosterDocument4 pagesBET PosterSiddharth MohantyNo ratings yet
- Motor Fault Diagnostics Based On Current Signatures A ReviewDocument19 pagesMotor Fault Diagnostics Based On Current Signatures A ReviewBadre BellaliNo ratings yet
- Axial-Gap Brushless DC Motor (2008 FDR)Document48 pagesAxial-Gap Brushless DC Motor (2008 FDR)Константин ПрокопьевNo ratings yet