You might also like
- A Time-Stepping Coupled Finite Element-State Space Model For Im DrivesDocument3 pagesA Time-Stepping Coupled Finite Element-State Space Model For Im Drivessajs201100% (1)
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument5 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Simulation and Analysis of Modified DTC of PMSMDocument10 pagesSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeNo ratings yet
- DQ InductanceDocument11 pagesDQ Inductancegthulasi789193No ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Extreme Possibilities of Circuital Models of Electric MachinesDocument10 pagesExtreme Possibilities of Circuital Models of Electric Machinesmherold2No ratings yet
- Characteristic Modes: Theory and Applications in Antenna EngineeringFrom EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNo ratings yet
- Permanent Magnet Synchronous MachineDocument7 pagesPermanent Magnet Synchronous MachineSantiago DavidNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Meng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangDocument10 pagesMeng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangGeet DeokateNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Articol 9Document6 pagesArticol 9Constantin DorinelNo ratings yet
- Modeling and Parameter Identification of A Double-Star Induction MachinesDocument7 pagesModeling and Parameter Identification of A Double-Star Induction MachineshaimantiNo ratings yet
- Rotor Flux Estimation Using Voltage Model of Induction MotorDocument5 pagesRotor Flux Estimation Using Voltage Model of Induction MotorBobby RinaldiNo ratings yet
- 87 Kutt Michna PopDocument6 pages87 Kutt Michna PopVally ZazaNo ratings yet
- Understanding Switched Reluctance Motor Analysis Using ANSYS/MaxwellDocument5 pagesUnderstanding Switched Reluctance Motor Analysis Using ANSYS/MaxwellItsMeASNo ratings yet
- Mathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate FrameDocument11 pagesMathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate Framegodspower brunoNo ratings yet
- Modeling &torque Ripple Minimization of Switched Reluctance Motor For High Speed ApplicationsDocument6 pagesModeling &torque Ripple Minimization of Switched Reluctance Motor For High Speed ApplicationsMoon3pellNo ratings yet
- Short Circuit Current Duties of Circuit Breakers and Fuses - Part 1Document6 pagesShort Circuit Current Duties of Circuit Breakers and Fuses - Part 1rajuanthatiNo ratings yet
- Ying 99Document6 pagesYing 99Vladimir GeorgievskiNo ratings yet
- Jaswant Scopus PaperDocument15 pagesJaswant Scopus PaperpreetivermaeeeNo ratings yet
- Comparison Between Foc and DTC Strategies For Permanent Magnet Synchronous MotorsDocument6 pagesComparison Between Foc and DTC Strategies For Permanent Magnet Synchronous MotorsaasfklNo ratings yet
- PMSM ModelDocument6 pagesPMSM ModelAditya SinghNo ratings yet
- Direct Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachDocument4 pagesDirect Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachKushagra KhamesraNo ratings yet
- Short Circuit Current Duties of Circuit Breakers and FusesDocument13 pagesShort Circuit Current Duties of Circuit Breakers and Fuseskra_amNo ratings yet
- Modelling of A 3-Phase Induction Motor Under Open-Phase - 2016Document7 pagesModelling of A 3-Phase Induction Motor Under Open-Phase - 2016laith fadhilNo ratings yet
- 12 Nilaykumar PatelDocument7 pages12 Nilaykumar Patelmohammed dawNo ratings yet
- A Modified Sensorless Control of Induction Motor Based On Reactive PowerDocument4 pagesA Modified Sensorless Control of Induction Motor Based On Reactive PowerSherif M. DabourNo ratings yet
- D6 Transmission Model Parameter Draft1-2 - 9!3!2010Document38 pagesD6 Transmission Model Parameter Draft1-2 - 9!3!2010فیضان حنیفNo ratings yet
- Dynamic Model of Induction Motors For Vector ControlDocument10 pagesDynamic Model of Induction Motors For Vector ControlMarica RalucaNo ratings yet
- Modeling and Simulation of Six-Phase Permanent Magnet Synchronous Motor DriveDocument9 pagesModeling and Simulation of Six-Phase Permanent Magnet Synchronous Motor Driveجمال ضيفي100% (1)
- IPMSM Inductances Calculation Using FEADocument5 pagesIPMSM Inductances Calculation Using FEABooNo ratings yet
- Dynamic Simulation of Switched Reluctance Motor Using MatlabDocument5 pagesDynamic Simulation of Switched Reluctance Motor Using MatlabachyuachyuthanNo ratings yet
- 1 s2.0 S0378475418300983 MainDocument15 pages1 s2.0 S0378475418300983 MainFaiza OuiddirNo ratings yet
- 12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling SiDocument7 pages12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling Sijeevan sankarNo ratings yet
- Analytical Investigation On Fundamental Electrical Characteristics of Large Air-Gap Superconducting Synchronous MachineDocument8 pagesAnalytical Investigation On Fundamental Electrical Characteristics of Large Air-Gap Superconducting Synchronous MachineahmadNo ratings yet
- Modeling of Electric Motors For Electromagnetic Compatibility AnalysisDocument5 pagesModeling of Electric Motors For Electromagnetic Compatibility AnalysisRudanekNo ratings yet
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDocument10 pagesDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadNo ratings yet
- Models of Synchronous Generator and Transformers For Dispatch Training Simulators and Real Time Digital SimulatorsDocument6 pagesModels of Synchronous Generator and Transformers For Dispatch Training Simulators and Real Time Digital Simulatorsiraj_214No ratings yet
- Kumar-Jena2017 Article SolutionToFaultDetectionDuringDocument11 pagesKumar-Jena2017 Article SolutionToFaultDetectionDuringBrooke ClineNo ratings yet
- Research On SVPWM OkDocument6 pagesResearch On SVPWM OkAnonymous 1D3dCWNcNo ratings yet
- IEEE-TOM - Journal ArticleDocument4 pagesIEEE-TOM - Journal ArticleedumacerenNo ratings yet
- Sensorless Vector ControlDocument23 pagesSensorless Vector ControlTien Nguyen DangNo ratings yet
- Effect of Metal Oxide Surge Arrester On Ferroresonance in Voltage Transformer Including Nonlinear Core LossesDocument5 pagesEffect of Metal Oxide Surge Arrester On Ferroresonance in Voltage Transformer Including Nonlinear Core LossesbpchimeraNo ratings yet
- PMSM Model With Phase-to-Phase Short-Circuit and Diagnosis by ESA and EPVADocument9 pagesPMSM Model With Phase-to-Phase Short-Circuit and Diagnosis by ESA and EPVAJaydi ZambranoNo ratings yet
- Analysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingDocument4 pagesAnalysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingmohammadNo ratings yet
- Class 3Document11 pagesClass 3Manjula sNo ratings yet
- Analysis of Short-Circuit Asymmetrical Currents in Power Distribution SystemsDocument6 pagesAnalysis of Short-Circuit Asymmetrical Currents in Power Distribution SystemscesarNo ratings yet
- Fluxes and Dispersion Reactances Fluxes and Dispersion Reactances of The Asyncronous MachineDocument6 pagesFluxes and Dispersion Reactances Fluxes and Dispersion Reactances of The Asyncronous MachineUrsatii NicolaiNo ratings yet
- Transformer Internal Faults Simulation: Advances in Electrical and Computer Engineering June 2008Document7 pagesTransformer Internal Faults Simulation: Advances in Electrical and Computer Engineering June 2008Ali AldesogeNo ratings yet
- Modeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of MostDocument10 pagesModeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of Mostseshubabu_999No ratings yet
- Ga Speed and DQ Currnets Control of PMSM WithDocument9 pagesGa Speed and DQ Currnets Control of PMSM Withhieuhuech1No ratings yet
- Pedstc2020 Farbodsaedi 01510144Document5 pagesPedstc2020 Farbodsaedi 0151014426765144No ratings yet
- Design and Comparison of Multistage Axial Flux Permanent Magnet Machines For Potable Generating ApplicationDocument8 pagesDesign and Comparison of Multistage Axial Flux Permanent Magnet Machines For Potable Generating Applicationray davisNo ratings yet
- A Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesDocument6 pagesA Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesGo GoNo ratings yet
- FEA Model Study of Spectral Signature Patterns of Chapitre1Document6 pagesFEA Model Study of Spectral Signature Patterns of Chapitre1Faiza OuiddirNo ratings yet
- Usman 2017Document6 pagesUsman 2017Faiza OuiddirNo ratings yet
- Stator Faults Modeling and Diagnostics of Line-Start Permanent Magnet Synchronous MotorsDocument10 pagesStator Faults Modeling and Diagnostics of Line-Start Permanent Magnet Synchronous MotorsFaiza OuiddirNo ratings yet
- A 2-D Model of The Induction Machine An Extension of The Modified Winding Function ApproachDocument7 pagesA 2-D Model of The Induction Machine An Extension of The Modified Winding Function ApproachFaiza OuiddirNo ratings yet
- An Extended Model of Induction Machines With Saturation Suitable For Fault AnalysisDocument8 pagesAn Extended Model of Induction Machines With Saturation Suitable For Fault AnalysisFaiza OuiddirNo ratings yet
- Structural Identifiability Analysis of Steady-State Induction Machine ModelsDocument6 pagesStructural Identifiability Analysis of Steady-State Induction Machine ModelsFaiza OuiddirNo ratings yet
- Short Review of Development Approaches of Mathematical Models For Induction Motor Nonsymmetrical Modes ResearchDocument5 pagesShort Review of Development Approaches of Mathematical Models For Induction Motor Nonsymmetrical Modes ResearchFaiza OuiddirNo ratings yet
- 10.1007@s42417 020 00253 y - CurrentDocument32 pages10.1007@s42417 020 00253 y - CurrentPedro OdorizziNo ratings yet
- A Review of Subdomain Modeling Techniques in Electrical Machines Performances and ApplicationsDocument7 pagesA Review of Subdomain Modeling Techniques in Electrical Machines Performances and ApplicationsFaiza OuiddirNo ratings yet
- Modeling For The Design of Fractional Slot PM Machines With Concentrated Windings Protected From Demagnetization During Three-Phase Short CircuitDocument8 pagesModeling For The Design of Fractional Slot PM Machines With Concentrated Windings Protected From Demagnetization During Three-Phase Short CircuitFaiza OuiddirNo ratings yet
- Accurate Torque-Sensorless Control Approach For Interior Permanent-Magnet Synchronous Machine Based On Cascaded Sliding Mode ObserverDocument9 pagesAccurate Torque-Sensorless Control Approach For Interior Permanent-Magnet Synchronous Machine Based On Cascaded Sliding Mode ObserverFaiza OuiddirNo ratings yet
- Demagnetization Fault Diagnosis of PMSM Based On Analytic Inductance CalculationDocument5 pagesDemagnetization Fault Diagnosis of PMSM Based On Analytic Inductance CalculationFaiza OuiddirNo ratings yet
- Analytical Model For Combined Study of Magnet Demagnetization and Eccentricity Defects in Axial Flux Permanent Magnet Synchronous MachinesDocument12 pagesAnalytical Model For Combined Study of Magnet Demagnetization and Eccentricity Defects in Axial Flux Permanent Magnet Synchronous MachinesFaiza OuiddirNo ratings yet
- 10 1109@upec 2013 6715044Document6 pages10 1109@upec 2013 6715044Faiza OuiddirNo ratings yet
- 1 s2.0 S0378475418300983 MainDocument15 pages1 s2.0 S0378475418300983 MainFaiza OuiddirNo ratings yet
- Appendix 7Document27 pagesAppendix 7Siswand BIn Mohd AliNo ratings yet
- Concept Recap Test Mains 2Document22 pagesConcept Recap Test Mains 2Siddharth GangalNo ratings yet
- Transformer & PumpDocument10 pagesTransformer & PumpGareth LestradeNo ratings yet
- Rocket Water Parachute - KrishnaDocument33 pagesRocket Water Parachute - KrishnaKrishna PreeyaNo ratings yet
- Chem Group 2Document32 pagesChem Group 2Princess AndoNo ratings yet
- Factors Affecting The Motion of A Falling ObjectDocument51 pagesFactors Affecting The Motion of A Falling ObjectJanet VillasanaNo ratings yet
- Caloric RequirementsDocument12 pagesCaloric RequirementsMeow CattoNo ratings yet
- Busbar Size and CalculationDocument8 pagesBusbar Size and Calculationandro max100% (1)
- 1073R PDFDocument10 pages1073R PDFElhindi hatimNo ratings yet
- Oa1-Two MarksDocument28 pagesOa1-Two MarksMEIVELJ 19EE025No ratings yet
- ETO - Interview SyllabusDocument3 pagesETO - Interview SyllabusKarthikeyan GNo ratings yet
- Low Cost, Miniature Isolation Amplifiers AD202/AD204: High AccuracyDocument12 pagesLow Cost, Miniature Isolation Amplifiers AD202/AD204: High AccuracyDiego I. HernándezNo ratings yet
- Chapter 2. Spatially Varied Flow (SVF) PDFDocument14 pagesChapter 2. Spatially Varied Flow (SVF) PDFVỏ Bọc0% (1)
- UR18650A SanyoDocument6 pagesUR18650A SanyobuddymdqNo ratings yet
- Complete Project ReportDocument100 pagesComplete Project ReportSrijith 5004No ratings yet
- Imel Talag Las Technical Drafting G10 Week 3-4Document5 pagesImel Talag Las Technical Drafting G10 Week 3-4Imel Aguado TalagNo ratings yet
- Labphys 6Document4 pagesLabphys 6Edyson CitraNo ratings yet
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Document3 pagesIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedNo ratings yet
- 0309 Energy Transition and The Electricity MarketDocument70 pages0309 Energy Transition and The Electricity MarketFenhia RivasNo ratings yet
- Science 8 1st Quarter Exam 2021-2022Document4 pagesScience 8 1st Quarter Exam 2021-2022JingjingAloComendador100% (3)
- Technical ResolutionDocument1 pageTechnical Resolutionsyedabuthahir_mNo ratings yet
- ATV312 Quick Start en S1A10942 03Document4 pagesATV312 Quick Start en S1A10942 03w.priatmadiNo ratings yet
- A30050-X6026-X-4-7618-rectifier GR60Document17 pagesA30050-X6026-X-4-7618-rectifier GR60baothienbinhNo ratings yet
- FluidsDocument55 pagesFluidsdanena88No ratings yet
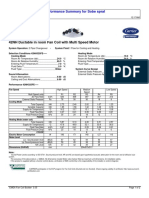
- 42NH Ductable in Room Fan Coil With Multi Speed Motor: Performance Summary For Sobe SpratDocument2 pages42NH Ductable in Room Fan Coil With Multi Speed Motor: Performance Summary For Sobe Spratvelikimag87No ratings yet
- What Is The Difference Between 0 2 and 0 2s Class CTDocument3 pagesWhat Is The Difference Between 0 2 and 0 2s Class CTSatyadeo VyasNo ratings yet
- Boardwork 1Document59 pagesBoardwork 1Tapan BadheiNo ratings yet
- Thermodynamics II Assignment 3: C R I H H I R H HDocument2 pagesThermodynamics II Assignment 3: C R I H H I R H HPriyanshuNo ratings yet
- Panelboard and Switchboard PDFDocument32 pagesPanelboard and Switchboard PDFGerardo M. James BravoNo ratings yet
- Data Sheet 3UG4615-2CR20Document6 pagesData Sheet 3UG4615-2CR20Daniel GomesNo ratings yet