You might also like
- 123-Smart Locker FingerprintDocument1 page123-Smart Locker FingerprintzulNo ratings yet
- MPC Aug 18Document8 pagesMPC Aug 18Kunal SinhaNo ratings yet
- LBS CableDocument1 pageLBS CableArry ArekKulonanNo ratings yet
- IATF Objective Data Analysis - Quality - Example2Document2 pagesIATF Objective Data Analysis - Quality - Example2Sachin RamdurgNo ratings yet
- IATF Objective Data Analysis - Quality - Example2 PDFDocument2 pagesIATF Objective Data Analysis - Quality - Example2 PDFSachin RamdurgNo ratings yet
- Reading Power: - Lestoury EducationDocument24 pagesReading Power: - Lestoury EducationRui YeNo ratings yet
- IRT-Studio-shema Complet1Document7 pagesIRT-Studio-shema Complet1Strato GibsonNo ratings yet
- ZBHH 2Document1 pageZBHH 2FF XNo ratings yet
- Pepe RodrigoDocument1 pagePepe RodrigoBrian Montes PinedoNo ratings yet
- 08 Sixteenth Notes, Eighth NotesDocument1 page08 Sixteenth Notes, Eighth NotesjyidouNo ratings yet
- Physics Booklet2 2017Document31 pagesPhysics Booklet2 2017Anas OsamaNo ratings yet
- Proyeccion de Cubierta: Oficio BARDocument1 pageProyeccion de Cubierta: Oficio BARBruce JimenezNo ratings yet
- 4 Digits of Seven Segment LED Displays Are Connected in Multiplexed Mode With Seven Segment Data Input.Document12 pages4 Digits of Seven Segment LED Displays Are Connected in Multiplexed Mode With Seven Segment Data Input.Sourabh HajraNo ratings yet
- Site PlanDocument1 pageSite PlanAndi ApriadiNo ratings yet
- Esp32 Cam V1.6 PDFDocument1 pageEsp32 Cam V1.6 PDFBuzatu Giani100% (1)
- Critical Flange Make-Up Checklist (Empty)Document1 pageCritical Flange Make-Up Checklist (Empty)Jorge GarciaNo ratings yet
- Bikeways MapDocument1 pageBikeways MapfdgsNo ratings yet
- Prof Ghafoor Ahmed - by Khurram BadrDocument192 pagesProf Ghafoor Ahmed - by Khurram BadrDr FaiyazNo ratings yet
- SplitPDFFile 15Document1 pageSplitPDFFile 15t.parhizkar.khNo ratings yet
- Sven Ha-385 SCHDocument2 pagesSven Ha-385 SCHАндрюха КорнNo ratings yet
- Programa de Mejora Continua: Metodología Incrementa Lean Six SigmaDocument70 pagesPrograma de Mejora Continua: Metodología Incrementa Lean Six SigmaROCIO RoSALYN EGOAVIL CONDORNo ratings yet
- 2201 CMG20 So15MEP REV.6Document1 page2201 CMG20 So15MEP REV.6shakeer2399shaNo ratings yet
- 15112739-D-T01-02 (STS Crane - GH) - SGNDocument1 page15112739-D-T01-02 (STS Crane - GH) - SGNdheeraj SureshNo ratings yet
- 8 Funk Rock Drum Beats With 16th Note Hi Hats - Grade 5 PDFDocument1 page8 Funk Rock Drum Beats With 16th Note Hi Hats - Grade 5 PDFd52gpyk+f1lxuoNo ratings yet
- CHAFLÁNDocument3 pagesCHAFLÁNcarlos arturo sierra diosaNo ratings yet
- Plano ViviendaDocument1 pagePlano ViviendaChristian Erick La Rosa RojasNo ratings yet
- Denah Tampak - Detail Pintu JendelaDocument8 pagesDenah Tampak - Detail Pintu Jendelahansen 97No ratings yet
- ContentDocument12 pagesContentKamila sharminNo ratings yet
- mp0c00608 Si 001Document1 pagemp0c00608 Si 001varalo8978No ratings yet
- Matrix - WLAN Platforms Software Support MatrixDocument3 pagesMatrix - WLAN Platforms Software Support MatrixWK OngNo ratings yet
- SMART FIT - AP - INFORMATIVO-ModelDocument1 pageSMART FIT - AP - INFORMATIVO-ModelRoberto TorresNo ratings yet
- Debt Reduction Calculator 10Document6 pagesDebt Reduction Calculator 10mmahaliNo ratings yet
- Debt Reduction Calculator 10Document6 pagesDebt Reduction Calculator 10Amirudin Abdul MajidNo ratings yet
- Caterpillar Dump Truck 777D Electrical SystemsDocument1 pageCaterpillar Dump Truck 777D Electrical Systemsgire_3pich2005100% (1)
- As Primeiras LevadasDocument2 pagesAs Primeiras LevadasJoabe OliveiraNo ratings yet
- Solo Chris PotterDocument3 pagesSolo Chris PotterAlexandria NatashaNo ratings yet
- Flat 05.8.2021 (E0 E1) OkDocument12 pagesFlat 05.8.2021 (E0 E1) OkZeody YoeuyNo ratings yet
- DART India Chart Book - Apr 18Document11 pagesDART India Chart Book - Apr 18Aman GuptaNo ratings yet
- Level 01 Dimensioned LayoutDocument1 pageLevel 01 Dimensioned LayoutRebecca WangNo ratings yet
- Attachment - 4,5,7,8,9 (P3963 - Weekly Revised PMS - Rev-D - 25-10-18)Document63 pagesAttachment - 4,5,7,8,9 (P3963 - Weekly Revised PMS - Rev-D - 25-10-18)Daniyal KhursheedNo ratings yet
- Softball-Score-Sheet1 Versi IdhamDocument2 pagesSoftball-Score-Sheet1 Versi IdhamAdang100% (1)
- DART India Chart Book - July 18Document10 pagesDART India Chart Book - July 18Aman GuptaNo ratings yet
- Cobarramento012V Cobarramento0Gnd: Cognd4Document3 pagesCobarramento012V Cobarramento0Gnd: Cognd4Gustavo MoraesNo ratings yet
- SplitPDFFile 4Document1 pageSplitPDFFile 4t.parhizkar.khNo ratings yet
- PCM 2.0l 2 de 5Document2 pagesPCM 2.0l 2 de 5Felix VelasquezNo ratings yet
- Coupe D-D: SEA BDocument1 pageCoupe D-D: SEA BMahmoud ElboraeNo ratings yet
- Tango Kei: M.Linnemann 120Document2 pagesTango Kei: M.Linnemann 120Вячеслав ШевелевNo ratings yet
- DART India Chart Book - Aug 18Document10 pagesDART India Chart Book - Aug 18Aman GuptaNo ratings yet
- Subdivision Plan - QuirinoDocument3 pagesSubdivision Plan - QuirinoJem EripolNo ratings yet
- Shab e QadarDocument1 pageShab e QadarMuhammad KHalidNo ratings yet
- 2 Carcassi Etude 2 TABS PDFDocument2 pages2 Carcassi Etude 2 TABS PDFAndrew StainberhNo ratings yet
- Snímka Obrazovky 2023-09-02 o 23.19.09Document1 pageSnímka Obrazovky 2023-09-02 o 23.19.09Kokt KorNo ratings yet
- Prarthana ManjariDocument78 pagesPrarthana ManjariBible Mission KarimnagarNo ratings yet
- Prardhana ManjariDocument78 pagesPrardhana ManjariDharma TejaNo ratings yet
- Drumas 12Document1 pageDrumas 12Rijarda AristótelesNo ratings yet
- A119 - DPC - Ind01 - Rev03 - RDCDocument1 pageA119 - DPC - Ind01 - Rev03 - RDCmahrekNo ratings yet
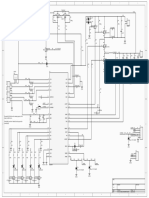
- SchematicDocument1 pageSchematicedu.brown.64No ratings yet
- Bocik Nocturno No.3Document1 pageBocik Nocturno No.3Miloš Sládečka100% (1)
- Single Stroke FrasesDocument2 pagesSingle Stroke FrasesRuan Pablo BateraNo ratings yet
- Main ContactsDocument2 pagesMain ContactsrolandNo ratings yet
- HelpDocument12 pagesHelpIgnacio Alejandro Jose Helo VarelaNo ratings yet
- System DescriptionDocument103 pagesSystem Descriptionroland100% (3)
- Customer SatisfactionDocument4 pagesCustomer SatisfactionrolandNo ratings yet
- WarrantyDocument6 pagesWarrantyrolandNo ratings yet
- FeedbackDocument1 pageFeedbackrolandNo ratings yet
- FeedbackDocument1 pageFeedbackrolandNo ratings yet
- WarrantyDocument6 pagesWarrantyrolandNo ratings yet
- Main ContactsDocument2 pagesMain ContactsrolandNo ratings yet
- Jan's Job CardsDocument4 pagesJan's Job CardsrolandNo ratings yet
- ECM 660IV Instruction ManualDocument251 pagesECM 660IV Instruction Manualroland100% (1)
- Cop 1838 Me & HeDocument3 pagesCop 1838 Me & HerolandNo ratings yet
- ECD45B - HYDRAULIC CIRCUIT & ELECTRIC CIRCUIT Rev.000Document14 pagesECD45B - HYDRAULIC CIRCUIT & ELECTRIC CIRCUIT Rev.000rolandNo ratings yet
- PTO NewDocument1 pagePTO NewrolandNo ratings yet
- 9852 3398 01 Settings COP 3060MEX - VerBDocument1 page9852 3398 01 Settings COP 3060MEX - VerBrolandNo ratings yet
- 9852 3289 01a Operators Instruction PowerROC T50 Tier 4Document112 pages9852 3289 01a Operators Instruction PowerROC T50 Tier 4fahmi rachmansutantoNo ratings yet
- Manual: For Diesel EngineDocument112 pagesManual: For Diesel EngineMarinel ILIE0% (1)
- S10 Electric Power PackDocument12 pagesS10 Electric Power PackrolandNo ratings yet
- Safety and Environmental InstructionsDocument86 pagesSafety and Environmental InstructionsrolandNo ratings yet
- 9852 0922 01d Setting The COP 1838HE-09Document1 page9852 0922 01d Setting The COP 1838HE-09rolandNo ratings yet
- COP Training Student Binder 1838 GB 061114Document326 pagesCOP Training Student Binder 1838 GB 061114roland100% (1)
- M 14 0005 PDFDocument5 pagesM 14 0005 PDFrolandNo ratings yet
- TE160HT - (9Kw - 1357Nm)Document2 pagesTE160HT - (9Kw - 1357Nm)rolandNo ratings yet
- Engine Fault Codes: CumminsDocument20 pagesEngine Fault Codes: CumminsCarlosNo ratings yet
- 2-1950 (RD520)Document3 pages2-1950 (RD520)rolandNo ratings yet
- Sandvik RD927L (Underground Drills) TS2-356 - 01Document2 pagesSandvik RD927L (Underground Drills) TS2-356 - 01rolandNo ratings yet
- DD422i - Maintenance Planner - Sheet 1Document2 pagesDD422i - Maintenance Planner - Sheet 1rolandNo ratings yet
- S08 Diesel Power Pack PDFDocument150 pagesS08 Diesel Power Pack PDFrolandNo ratings yet
- Sandvik RD314B TS2-137 - 01Document2 pagesSandvik RD314B TS2-137 - 01roland100% (1)
- 2-1950 (RD520)Document3 pages2-1950 (RD520)rolandNo ratings yet
- Hydroset Ii Packer: We Know DownholeDocument2 pagesHydroset Ii Packer: We Know DownholeabodolkuhaaNo ratings yet
- Modify A Metz 45ct1 Flash To Make It Full ManualDocument7 pagesModify A Metz 45ct1 Flash To Make It Full ManualLuisNo ratings yet
- TPE2 (D), TPE3 (D) : Safety Instructions and Other Important InformationDocument14 pagesTPE2 (D), TPE3 (D) : Safety Instructions and Other Important Informationhvacr061No ratings yet
- SKF Power Transmission ProductsDocument21 pagesSKF Power Transmission ProductsWaqas WakeelNo ratings yet
- Making Acrylic Router Base PlateDocument9 pagesMaking Acrylic Router Base Plateafrica schoolNo ratings yet
- Pump, Disassembly: Service InformationDocument5 pagesPump, Disassembly: Service InformationNaing Min Htun100% (1)
- Psa 10 110 950 PDFDocument2 pagesPsa 10 110 950 PDFchristian_mx5431No ratings yet
- GE Photographic Lamp Guide 1979Document58 pagesGE Photographic Lamp Guide 1979Alan MastersNo ratings yet
- NEC Table 310.77 (Detail 1 - One Circuit, 3-1/c in Single Duct)Document3 pagesNEC Table 310.77 (Detail 1 - One Circuit, 3-1/c in Single Duct)gyanendra_vatsa4380No ratings yet
- Contactor CatalogueDocument22 pagesContactor CatalogueRoqueo RDNo ratings yet
- Intelligent Plus: Installation ManualDocument54 pagesIntelligent Plus: Installation ManualAle LatroNo ratings yet
- Bacnet® Fixed Function Thermostat: For Fan Coil/Heat Pump/Conventional SystemsDocument8 pagesBacnet® Fixed Function Thermostat: For Fan Coil/Heat Pump/Conventional Systemsamjadjaved033148100% (1)
- Bell 429 Helicopter - High Resolution PanelDocument1 pageBell 429 Helicopter - High Resolution Panelguicordova0% (1)
- Siemens Power Engineering Guide 7E 149Document1 pageSiemens Power Engineering Guide 7E 149mydearteacherNo ratings yet
- Checklist - Pre-CommissioningDocument1 pageChecklist - Pre-CommissioningKengaiah Pothi RaajaNo ratings yet
- Komatsu GD 511a-1 Parts ManualDocument275 pagesKomatsu GD 511a-1 Parts ManualAhmadFadzli100% (1)
- TA2 424D Backhoe Loader RXADocument34 pagesTA2 424D Backhoe Loader RXAahmad adelNo ratings yet
- 308manual 5 03Document57 pages308manual 5 03basileiouspyrosNo ratings yet
- Oventrop Kit Users GuideDocument6 pagesOventrop Kit Users Guidevatraxi1000No ratings yet
- Buy AmazonBasics 21 Ltrs Classic Fabric Backpack - Navy at Amazon - inDocument1 pageBuy AmazonBasics 21 Ltrs Classic Fabric Backpack - Navy at Amazon - inAnjali PatelNo ratings yet
- CH 06 ArtilleryDocument64 pagesCH 06 ArtilleryPGNo ratings yet
- Realcom Field Bus Power Supply F892Document4 pagesRealcom Field Bus Power Supply F892Richard AndersonNo ratings yet
- Amra MisuraDocument13 pagesAmra MisuraMarco MatteucciNo ratings yet
- Fxsq100-125a Dim 3d094917a enDocument1 pageFxsq100-125a Dim 3d094917a enDragos PicuNo ratings yet
- Optimum Controller IV PartsDocument64 pagesOptimum Controller IV PartsFalcoNo ratings yet
- Manual de CNC Torno PDFDocument147 pagesManual de CNC Torno PDFGamaliel Delacruz IntocableNo ratings yet
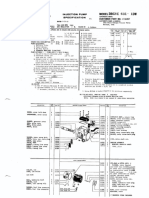
- Modeldbgvc 63i-1DW: Injection Pump SpecificationDocument2 pagesModeldbgvc 63i-1DW: Injection Pump Specificationjohnny sabinNo ratings yet
- Aurora MEA Price List 2009Document5 pagesAurora MEA Price List 2009راكان خالدNo ratings yet
- Co Acceptable Calculator List SatDocument1 pageCo Acceptable Calculator List SatTuntise AkintundeNo ratings yet
- ThermodynamicsDocument3 pagesThermodynamicsEdgar Irlanda PuralNo ratings yet