You might also like
- Complete INVERTER ProjectDocument34 pagesComplete INVERTER Projectalfred adukobirre adukobilla71% (17)
- Introduction to Electricity Supply and Regulation in IndiaFrom EverandIntroduction to Electricity Supply and Regulation in IndiaNo ratings yet
- CL Programming - 1Document87 pagesCL Programming - 1AshNo ratings yet
- Safty Clearence For ElectricalDocument11 pagesSafty Clearence For ElectricalPramod B.WankhadeNo ratings yet
- Math 7 - Summative Test Q2Document5 pagesMath 7 - Summative Test Q2Brian Mary100% (5)
- Ev Engine ResearchDocument15 pagesEv Engine ResearchAnshul YadavNo ratings yet
- Alma Lasers Accent Prime Service ManualDocument164 pagesAlma Lasers Accent Prime Service Manualcankutayhotmail.com100% (1)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Spectralwave V-Node: Cid Setup Menu ExplanationDocument88 pagesSpectralwave V-Node: Cid Setup Menu ExplanationjanNo ratings yet
- Wind Energy Conversion SystemsDocument11 pagesWind Energy Conversion Systemsankita1231No ratings yet
- ActuatorDocument21 pagesActuatorkylechristiansarmientoNo ratings yet
- AleksandrNevzorov Prelab3Document5 pagesAleksandrNevzorov Prelab3extazyfox2No ratings yet
- Adsız 1Document17 pagesAdsız 1Murat ArıkanNo ratings yet
- AC generators:AC Generators Are Known As Single-Phase Generators and Are Limited To 25kWDocument9 pagesAC generators:AC Generators Are Known As Single-Phase Generators and Are Limited To 25kWJera ObsinaNo ratings yet
- Robot Drive Systems and End EffectorsDocument96 pagesRobot Drive Systems and End Effectorsgnanasekar.mechNo ratings yet
- ME310grp1 Compressors - Generators (Read-Only)Document43 pagesME310grp1 Compressors - Generators (Read-Only)offiNo ratings yet
- Chapter-1Document39 pagesChapter-1khagendra SenchuriNo ratings yet
- Dynamometer ReportDocument8 pagesDynamometer ReportAly MohamedNo ratings yet
- Alternator&motors PDFDocument24 pagesAlternator&motors PDFGargi YadavNo ratings yet
- Sensor Group 8Document12 pagesSensor Group 8A-16 Sanket GhadageNo ratings yet
- Plant Utilities & Maintenance: .: Karte 01.aDocument33 pagesPlant Utilities & Maintenance: .: Karte 01.aHidayat StafaNo ratings yet
- EEOM AssignmentDocument4 pagesEEOM Assignmentjoseph5689No ratings yet
- Actuators: Definition, Types & Examples: DR - Devender KumarDocument19 pagesActuators: Definition, Types & Examples: DR - Devender KumarEditor IRBJNo ratings yet
- Power Generation Using Vehicle SuspensionDocument3 pagesPower Generation Using Vehicle SuspensionAnonymous 83DtcmB1nGNo ratings yet
- Introduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramDocument21 pagesIntroduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramtoshaliNo ratings yet
- Introduction To Electrical Drives: Figure 1 Conventional Variable Speed Electrical Drive SystemDocument19 pagesIntroduction To Electrical Drives: Figure 1 Conventional Variable Speed Electrical Drive SystemChakradhara TheppavariNo ratings yet
- Indiction Generator TheoryDocument4 pagesIndiction Generator Theoryraghu_mnNo ratings yet
- 1.power-Generating Knee Strap Hints at End For BatteriesDocument23 pages1.power-Generating Knee Strap Hints at End For BatteriesSRL MECHNo ratings yet
- Actuators For Robots: A Presentation OnDocument26 pagesActuators For Robots: A Presentation OnreezmanNo ratings yet
- Lecture Notes On Utilization of Electric PDFDocument421 pagesLecture Notes On Utilization of Electric PDFPuneeth PuniNo ratings yet
- Ch-2 PPT ActuatorsDocument12 pagesCh-2 PPT ActuatorsArganoNo ratings yet
- Ic 6501 CS Unit IDocument6 pagesIc 6501 CS Unit ISAMPATH ANo ratings yet
- GhostDocument10 pagesGhostAlçacio Carlos MutevuieNo ratings yet
- Power SystemDocument6 pagesPower SystemAbdulhakim TREKINo ratings yet
- Define Mechatronics and List Three Advantages For MechatronicsDocument15 pagesDefine Mechatronics and List Three Advantages For MechatronicsMostafa Tarek shabanNo ratings yet
- Tint Wai Min Khant, PartDocument11 pagesTint Wai Min Khant, PartSniper- KNo ratings yet
- Electric Motor Voltage: Chapter 1: Fundamentals of Electric DrivesDocument17 pagesElectric Motor Voltage: Chapter 1: Fundamentals of Electric DrivesRAJOLI GIRISAI MADHAVNo ratings yet
- Robot Actuators & Feed Back ComponentsDocument25 pagesRobot Actuators & Feed Back ComponentsANONYMOUS PDFSNo ratings yet
- Generation and TransmissionDocument9 pagesGeneration and TransmissionAzat OnkolNo ratings yet
- Intro StudyingDocument9 pagesIntro StudyingZeyadNo ratings yet
- Final ELTA - GA 2Document13 pagesFinal ELTA - GA 2ldvsoundsNo ratings yet
- Basic EE AssignmentDocument2 pagesBasic EE AssignmentharveyNo ratings yet
- Part 1 - Introduction To DC MachinesDocument21 pagesPart 1 - Introduction To DC MachinesKevin Lester LoboNo ratings yet
- Drive Assignment 212Document23 pagesDrive Assignment 212Johnson AkinyeleNo ratings yet
- Electric Actuators: Green Solution Against Pneumatic and Hydraulic ActuatorsDocument4 pagesElectric Actuators: Green Solution Against Pneumatic and Hydraulic Actuatorspooja yadavNo ratings yet
- Revisi TugasDocument3 pagesRevisi Tugassyefira.anastasyaNo ratings yet
- ED - Notes Inroduction To Electric Drives-0Document8 pagesED - Notes Inroduction To Electric Drives-0Manideep ManiNo ratings yet
- 3 CNC PPT Lecture 2 DoneDocument38 pages3 CNC PPT Lecture 2 DoneSidhant AryaNo ratings yet
- MPEB Summer Training ReportDocument24 pagesMPEB Summer Training ReportKeshav Chadha88% (8)
- Electric Machines: EE-151 Electrical EngineeringDocument21 pagesElectric Machines: EE-151 Electrical EngineeringZeeshan ShakoorNo ratings yet
- Control ComponentsDocument74 pagesControl ComponentsJothi PriyaNo ratings yet
- Motor Control ComponentsDocument8 pagesMotor Control ComponentsBrother ElyNo ratings yet
- Chapter 5 Electrical MachineDocument27 pagesChapter 5 Electrical MachineBirhex FeyeNo ratings yet
- Control System in Modern Refrigeration SystemsDocument9 pagesControl System in Modern Refrigeration SystemsVishal Vivek SaikiaNo ratings yet
- Chapter 6Document4 pagesChapter 6Indu SusmiNo ratings yet
- Generation of Electrical Energy-1Document46 pagesGeneration of Electrical Energy-1ABRAR AHMADNo ratings yet
- TPESDocument4 pagesTPESJade FalcoNo ratings yet
- Pneumatic Controls and Designs: Wendell Z. BuenaobraDocument11 pagesPneumatic Controls and Designs: Wendell Z. BuenaobraJohn Paul DaliopacNo ratings yet
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- Electrical Measurements: Lecture NotesDocument68 pagesElectrical Measurements: Lecture NotesgeethaNo ratings yet
- Utilization of Electrical Energy PDFDocument421 pagesUtilization of Electrical Energy PDFManoj KumarNo ratings yet
- Electrical Drives IntroDocument6 pagesElectrical Drives IntroAnoop MathewNo ratings yet
- Charging System12345Document48 pagesCharging System12345Hriday AryaNo ratings yet
- Internship ReportDocument6 pagesInternship ReportEngr Syed Numan ShahNo ratings yet
- CHAPTER 1 On Case StudyDocument4 pagesCHAPTER 1 On Case Studygevos gabicaNo ratings yet
- UNIT-1 Introduction, Classification, ComponentsDocument80 pagesUNIT-1 Introduction, Classification, Componentscherry tejaNo ratings yet
- VR 19 PPE - Class PPT For UNIT-1 Reference PurposeDocument116 pagesVR 19 PPE - Class PPT For UNIT-1 Reference Purposecherry tejaNo ratings yet
- Effluents From Power Plants and Impact On EnvironmentDocument23 pagesEffluents From Power Plants and Impact On Environmentcherry tejaNo ratings yet
- UNIT-2 Motion Analysis and KinematicsDocument62 pagesUNIT-2 Motion Analysis and Kinematicscherry tejaNo ratings yet
- UNIT-4 Trajectory, Path Planning and ProgrammingDocument49 pagesUNIT-4 Trajectory, Path Planning and Programmingcherry tejaNo ratings yet
- 40QB/QD Series: Floor Standing Split SystemDocument2 pages40QB/QD Series: Floor Standing Split SystemalexmilarNo ratings yet
- Module 5 Educ110Document3 pagesModule 5 Educ110fghejNo ratings yet
- HMC 511Document6 pagesHMC 511payam79bNo ratings yet
- Falcon I Standard 1Document4 pagesFalcon I Standard 1Azher MemonNo ratings yet
- Smartphone User Behaviour Predication Using AIDocument9 pagesSmartphone User Behaviour Predication Using AIIJRASETPublicationsNo ratings yet
- Unit-3: 1. Static Channel Allocation in Lans and MansDocument30 pagesUnit-3: 1. Static Channel Allocation in Lans and Mans09 rajesh DoddaNo ratings yet
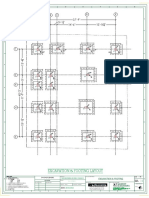
- Excavation and Footing LayoutDocument1 pageExcavation and Footing LayoutSandeep VarmaNo ratings yet
- RCGP - QIP - Blank - Template 200920Document3 pagesRCGP - QIP - Blank - Template 200920Amr El TaherNo ratings yet
- Boarding Pass: Travelling With Check-In Bags? Travelling With Cabin (Carry On) Baggage Only? Airport Reporting TimingsDocument1 pageBoarding Pass: Travelling With Check-In Bags? Travelling With Cabin (Carry On) Baggage Only? Airport Reporting TimingsMahesh GajjelliNo ratings yet
- 100 Page Python Intro v1p0Document114 pages100 Page Python Intro v1p0ArunghishNo ratings yet
- Cover LetterDocument6 pagesCover Letterafiwiafoc100% (2)
- Patent Registration in Zimbabwe: WWW - Rcz.ac - ZWDocument2 pagesPatent Registration in Zimbabwe: WWW - Rcz.ac - ZWchipiwaNo ratings yet
- Manual Mounting Type Dvc5010 Digital Valve Controllers On Fisher Type 657 667 Actuat en 141856Document6 pagesManual Mounting Type Dvc5010 Digital Valve Controllers On Fisher Type 657 667 Actuat en 141856hocine1No ratings yet
- Raspberry Pi Based OscilloscopeDocument5 pagesRaspberry Pi Based OscilloscopeTSA32 SYBSCIT Rasika TambeNo ratings yet
- Double MS Plugin: User GuideDocument9 pagesDouble MS Plugin: User GuidejestijamliNo ratings yet
- On The Performance of Intrusion Detection Systems With Hidden Multilayer Neural Network Using DSD TrainingDocument21 pagesOn The Performance of Intrusion Detection Systems With Hidden Multilayer Neural Network Using DSD TrainingAIRCC - IJCNCNo ratings yet
- NTCP AnalysisDocument12 pagesNTCP AnalysisParas KhuranaNo ratings yet
- SCENARIA View 128 Plus: With Dual EnergyDocument8 pagesSCENARIA View 128 Plus: With Dual EnergyGilang RamadhanNo ratings yet
- 2023 Interdict Application - MCEJO Vs Tendele - 5th To 8th Answering Affidavit & MCEJO's Replying AffidavitDocument190 pages2023 Interdict Application - MCEJO Vs Tendele - 5th To 8th Answering Affidavit & MCEJO's Replying AffidavitJanice TooleyNo ratings yet
- Stephan Universalmachines Um5 To Um60 EngDocument6 pagesStephan Universalmachines Um5 To Um60 EngHerman OsNo ratings yet
- Isr4331 k9 DatasheetDocument5 pagesIsr4331 k9 DatasheetJumput PurnomoNo ratings yet
- Powered Week - Storytelling SlidesDocument18 pagesPowered Week - Storytelling Slidess valenteNo ratings yet
- Chapter 2 Ca AnswersDocument9 pagesChapter 2 Ca Answersfaaltu accountNo ratings yet
- EmBridge Installation Guide (Win)Document12 pagesEmBridge Installation Guide (Win)Jaiyant KaranNo ratings yet
- Friction Based Welding Technology For Aluminium (July 2002) - TWI (BACKING NEEDED)Document11 pagesFriction Based Welding Technology For Aluminium (July 2002) - TWI (BACKING NEEDED)Amar DJEDIDNo ratings yet