You might also like
- Wind Turbine Generator - SynchronousDocument21 pagesWind Turbine Generator - SynchronousTahsin IbtidaNo ratings yet
- The Difference Between Asynchronous and Synchronous GeneratorDocument2 pagesThe Difference Between Asynchronous and Synchronous Generatorbik_mesiloveNo ratings yet
- Three Phase Synchronous Machines - 2015Document93 pagesThree Phase Synchronous Machines - 2015आश्विन मरहट्टाNo ratings yet
- Synchronous Motor Drive SeminarDocument19 pagesSynchronous Motor Drive SeminarSwarup MadduriNo ratings yet
- Synchronous Generator Lecture NoteDocument15 pagesSynchronous Generator Lecture NoteoyianonymousNo ratings yet
- E M II: Synchronous MachineDocument10 pagesE M II: Synchronous MachineAkashman ShakyaNo ratings yet
- EM 2 - Unit 4Document62 pagesEM 2 - Unit 4Black DiamoondNo ratings yet
- Construction and types of synchronous machinesDocument3 pagesConstruction and types of synchronous machinesYaser AhmedNo ratings yet
- Module V Synchronous MotorsDocument21 pagesModule V Synchronous Motorsyanith kumarNo ratings yet
- Bahir Dar Institute OF Technology: Synchronous MachinesDocument18 pagesBahir Dar Institute OF Technology: Synchronous Machineskelemyas ayalewNo ratings yet
- Chapter FourDocument28 pagesChapter FourAdugna KasimNo ratings yet
- Peres 10PPS103 2 Electrical Machines PDFDocument71 pagesPeres 10PPS103 2 Electrical Machines PDFThanigaivel RajaNo ratings yet
- Electrical Machines: Low Power ApplicationsDocument4 pagesElectrical Machines: Low Power ApplicationsOana PNo ratings yet
- Shaded Pole Induction MotorDocument7 pagesShaded Pole Induction MotorRahul BhumkarNo ratings yet
- Induction Motor: Navigation SearchDocument8 pagesInduction Motor: Navigation SearchSoni Mishra TiwariNo ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Doubly Fed Electric MachineDocument19 pagesDoubly Fed Electric MachineChristopher PerkinsNo ratings yet
- Rotating Magnetic Field Induces Current in RotorDocument114 pagesRotating Magnetic Field Induces Current in RotorNesarkiran BagadeNo ratings yet
- Synchronous MotorDocument33 pagesSynchronous Motorvnyshreyas100% (2)
- Synchronous Motor & Its Applications & Power Factor ImprovementDocument4 pagesSynchronous Motor & Its Applications & Power Factor ImprovementYash BansalNo ratings yet
- Unit2 MachinesDocument35 pagesUnit2 MachinesdineshkumarNo ratings yet
- Lecture 1 Machine IIIDocument24 pagesLecture 1 Machine IIIfrankmogul12No ratings yet
- Induction and Synchronous Motor FundamentalsDocument9 pagesInduction and Synchronous Motor FundamentalsfitxvNo ratings yet
- Pilot ExciterDocument6 pagesPilot ExciterRudy HerreraNo ratings yet
- Assignment 6 VincoyDocument16 pagesAssignment 6 VincoyVincoy JohnlloydNo ratings yet
- AlternatorDocument3 pagesAlternatorshekharpremsureNo ratings yet
- Topic 1Document20 pagesTopic 1Ʋiŋêet ḠåuṯḁmNo ratings yet
- Synchronous Motor Working Principle ExplainedDocument6 pagesSynchronous Motor Working Principle ExplainedHemraj Singh RautelaNo ratings yet
- Chapter 6 - Induction Motors (Part1)Document18 pagesChapter 6 - Induction Motors (Part1)SanjanaLakshmiNo ratings yet
- Electric motors and transformers in industriesDocument12 pagesElectric motors and transformers in industriesJayNo ratings yet
- Mesin-Mesin Listrik: Mesin Ac Sinkron GeneratorDocument4 pagesMesin-Mesin Listrik: Mesin Ac Sinkron GeneratorRIRIS RAHMAWATINo ratings yet
- Induction Synchronous MotorsDocument35 pagesInduction Synchronous MotorsDeandre LaingNo ratings yet
- Bee052 Electrical Machine Modeling and AnalysisDocument28 pagesBee052 Electrical Machine Modeling and Analysissunny g.100% (1)
- Classification of Synchronous GeneratorDocument5 pagesClassification of Synchronous Generatormuhammad afaq IEEENo ratings yet
- DFIGDocument6 pagesDFIGhassanNo ratings yet
- MotorsDocument25 pagesMotorsAyush SrivastavaNo ratings yet
- Synchronous MotorDocument26 pagesSynchronous MotorSyed Muhammad Munavvar HussainNo ratings yet
- Unit-5 SMDocument27 pagesUnit-5 SMShaik ShaheenaNo ratings yet
- AlternatorDocument24 pagesAlternatorJoseEduardoSantaCruzNo ratings yet
- Induction Machine TrainerDocument29 pagesInduction Machine TrainerBabyNo ratings yet
- Part II - AC MotorsDocument30 pagesPart II - AC MotorsYan Liang HaoNo ratings yet
- Three-Phase Motor BasicsDocument10 pagesThree-Phase Motor BasicsAtharv BhedaNo ratings yet
- Speed Control Methods of Induction MotorDocument6 pagesSpeed Control Methods of Induction MotorsahebraoNo ratings yet
- Electrical Machines Final AssignmentDocument13 pagesElectrical Machines Final Assignmentaamir.faiazNo ratings yet
- Synchronous MotorsDocument27 pagesSynchronous MotorsSyed Muhammad Munavvar Hussain50% (2)
- Chapter4 Synchronous MachinesDocument34 pagesChapter4 Synchronous Machinessatyakar_vvk100% (1)
- Induction Motor: Citations VerificationDocument11 pagesInduction Motor: Citations VerificationChamika Dilshan WickramawardenaNo ratings yet
- Electrical Generators PDFDocument71 pagesElectrical Generators PDFchaithra hsNo ratings yet
- EI4-Synchronous Motors Operating Principles and Starting MethodsDocument7 pagesEI4-Synchronous Motors Operating Principles and Starting MethodsRogger FabricioNo ratings yet
- Motors and LoadsDocument24 pagesMotors and Loadsmanukjoy007No ratings yet
- Synchronous Motor Application and OperationDocument3 pagesSynchronous Motor Application and OperationRajesh TipnisNo ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- Induction MotorDocument14 pagesInduction Motorhamba0007No ratings yet
- Chapter 5 Machine 1Document44 pagesChapter 5 Machine 1martazemeduNo ratings yet
- EET306 Tutorial 3 2018 SolutionDocument11 pagesEET306 Tutorial 3 2018 SolutionShang Divina EbradaNo ratings yet
- Unit 5 FinalDocument10 pagesUnit 5 FinaljayababNo ratings yet
- Introduction To Synchronous MachinesDocument7 pagesIntroduction To Synchronous Machineshus khNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Erods Engineering College Single Phase Induction Motor AssignmentDocument1 pageErods Engineering College Single Phase Induction Motor AssignmentANBARASU LNo ratings yet
- Speed Control of Induction Motor by Using Cyclo-ConverterDocument5 pagesSpeed Control of Induction Motor by Using Cyclo-ConverterBiswajit ChangkakotyNo ratings yet
- Everything You Need to Know About Brushless DC MotorsDocument16 pagesEverything You Need to Know About Brushless DC MotorsANBARASU LNo ratings yet
- Content Beyond The Syllabus Unit 3Document5 pagesContent Beyond The Syllabus Unit 3ANBARASU LNo ratings yet
- CH15033419GPUVer20101122Document32 pagesCH15033419GPUVer20101122Ranjith AdikariNo ratings yet
- Versamate Cleanroom Receptacle PR19Document1 pageVersamate Cleanroom Receptacle PR19Anonymous llBSa7No ratings yet
- Measure@Document220 pagesMeasure@Kashif ZaheerNo ratings yet
- PrismpackV PDFDocument14 pagesPrismpackV PDFRodrigo Alonso Rosales OrtegaNo ratings yet
- Door plan and section drawingDocument1 pageDoor plan and section drawingUtkarsh Anand100% (1)
- Introduction - : Electronic Parking Brake Systems (EPB)Document6 pagesIntroduction - : Electronic Parking Brake Systems (EPB)Hesham SalehNo ratings yet
- Certified LED Product SafetyDocument4 pagesCertified LED Product SafetyPhilip Jay-ar DimailigNo ratings yet
- D2Z Panelboard (EX LV DB)Document9 pagesD2Z Panelboard (EX LV DB)Camilo AquinoNo ratings yet
- Philips CorePro LEDtube T5 - 180531Document8 pagesPhilips CorePro LEDtube T5 - 180531Deco DluxeNo ratings yet
- Deleted FilesDocument18 pagesDeleted FilesSolarTrịnhNo ratings yet
- Cost Estimates For Electrical and Allied WorksDocument14 pagesCost Estimates For Electrical and Allied WorksyogenNo ratings yet
- iK60N circuit breakers guideDocument3 pagesiK60N circuit breakers guideAnonymous hXUhpe7SNo ratings yet
- Design For DCM ColumnsDocument2 pagesDesign For DCM ColumnsTruong Phuoc TriNo ratings yet
- ATS PresentationDocument20 pagesATS Presentationmohsinaliqureshi02100% (1)
- Republic of The Philippines: Office of The Building Official Puerto Princessa City A A ADocument1 pageRepublic of The Philippines: Office of The Building Official Puerto Princessa City A A ABerlin Andrew SionNo ratings yet
- Reciprocating Engine TS TipsDocument5 pagesReciprocating Engine TS TipsEstevamNo ratings yet
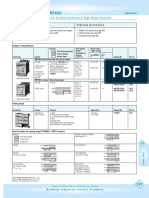
- Contactors and Contactor Assemblies: Contactors For Switching Motors SiriusDocument2 pagesContactors and Contactor Assemblies: Contactors For Switching Motors SiriusTanveer AhmedNo ratings yet
- Method Statement - Installation of Electrical BoxesDocument5 pagesMethod Statement - Installation of Electrical BoxesiamajumalNo ratings yet
- Lighting Design Tips for Energy Efficient Commercial BuildingsDocument12 pagesLighting Design Tips for Energy Efficient Commercial Buildingskhaniskhan03No ratings yet
- Double Break Rotary IsolatorDocument4 pagesDouble Break Rotary IsolatorSanlit JainNo ratings yet
- Leaflet Zvar CapacitorsDocument5 pagesLeaflet Zvar CapacitorsGagak 2304No ratings yet
- Substation Designing - GISDocument11 pagesSubstation Designing - GISBalu M100% (1)
- De-je-Ar - Templet Letest PV2 - APDIYTID DecDocument121 pagesDe-je-Ar - Templet Letest PV2 - APDIYTID Decjohn jason bayudanNo ratings yet
- 196 The 1.4-ltr. 16V 55kW Engine With Roller-Type Cam Follower PDFDocument36 pages196 The 1.4-ltr. 16V 55kW Engine With Roller-Type Cam Follower PDFAllan CancinoNo ratings yet
- Relay - 3RP1Document4 pagesRelay - 3RP1Telaumbanua ElibertusNo ratings yet
- OEM Pressure Sensor Circuit Troubleshooting GuideDocument4 pagesOEM Pressure Sensor Circuit Troubleshooting GuideEnrrique LaraNo ratings yet
- 4KN Enuk V3 1Document8 pages4KN Enuk V3 1MustaphaMehdiHamamineNo ratings yet
- Catalogo de Partes Alternador Principal C66D5Document2 pagesCatalogo de Partes Alternador Principal C66D5dqsclNo ratings yet
- Kheraj Price List Final 2016 PDFDocument8 pagesKheraj Price List Final 2016 PDFManishKatariaNo ratings yet
- 6 - 33kV Surge Arrester2Document1 page6 - 33kV Surge Arrester2Zeckrey JikurunNo ratings yet