You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Stationary Time Series AnalysisDocument18 pagesStationary Time Series AnalysisAnkuNo ratings yet
- 4 Time SeriesDocument31 pages4 Time SeriesJ.i. LopezNo ratings yet
- Non Stationary PhenomenaDocument3 pagesNon Stationary PhenomenaHassan Safdar MalikNo ratings yet
- Time Series Chap21Document27 pagesTime Series Chap21ims1No ratings yet
- Stationarity of Time Series: Testing and ConsequencesDocument14 pagesStationarity of Time Series: Testing and ConsequencesNuwani ManasingheNo ratings yet
- Chapter Twenty - Time SeriesDocument28 pagesChapter Twenty - Time Seriesনিশীথিনী কুহুরানীNo ratings yet
- Chapter Twenty - Time SeriesDocument21 pagesChapter Twenty - Time SeriesSDB_EconometricsNo ratings yet
- Lecture 6 On Time Series Econometrics IDocument13 pagesLecture 6 On Time Series Econometrics IdiptodsNo ratings yet
- PTRV IV Unit - Classification of Random ProcessesDocument9 pagesPTRV IV Unit - Classification of Random ProcessesBhavaniPrasad100% (1)
- Stationary and Non StationaryDocument5 pagesStationary and Non StationaryAkriti SinghNo ratings yet
- ARIMA Estimation: Theory and Applications: 1 General Features of ARMA ModelsDocument18 pagesARIMA Estimation: Theory and Applications: 1 General Features of ARMA ModelsCarmen RamírezNo ratings yet
- Propaganda MediaDocument42 pagesPropaganda MediaAbdullah ShahNo ratings yet
- Chapter 1. Basic Concepts in Time Series AnalysisDocument43 pagesChapter 1. Basic Concepts in Time Series AnalysisJose C Beraun TapiaNo ratings yet
- Station A RityDocument18 pagesStation A RityStiven RodriguezNo ratings yet
- Modelling Long-Run Relationship in Finance (Chapter 7) : Module 5. 2. Time Series Analysis (1I)Document49 pagesModelling Long-Run Relationship in Finance (Chapter 7) : Module 5. 2. Time Series Analysis (1I)Abhishek P BenjaminNo ratings yet
- Stationary Stochastic ProcessesDocument11 pagesStationary Stochastic Processesmathlete2No ratings yet
- Stationary Stochastic Process ExplainedDocument11 pagesStationary Stochastic Process ExplainedSouhailNo ratings yet
- AUTOCORRELATIONDocument6 pagesAUTOCORRELATIONRameez Abdul RahimanNo ratings yet
- Lec10 2019Document35 pagesLec10 2019Victor TanNo ratings yet
- 2.10 Stationary Time Series-1607080624480Document35 pages2.10 Stationary Time Series-1607080624480ashutosh malhotraNo ratings yet
- Intro of Time SeriesDocument18 pagesIntro of Time SeriesDr.Surajit DasNo ratings yet
- Unit RootDocument33 pagesUnit RootVaishali SharmaNo ratings yet
- WOI_Econometrics Ch11 Further Issues in Using OLS with Time Series DataDocument12 pagesWOI_Econometrics Ch11 Further Issues in Using OLS with Time Series DataSusi DianNo ratings yet
- Asian Options Under Multiscale Stochastic Volatility: Jean-Pierre Fouque and Chuan-Hsiang HanDocument14 pagesAsian Options Under Multiscale Stochastic Volatility: Jean-Pierre Fouque and Chuan-Hsiang Hanabhishek210585No ratings yet
- Arch ModelsDocument13 pagesArch Modelsgarym28No ratings yet
- Methods For Applied Macroeconomics Research - ch1Document28 pagesMethods For Applied Macroeconomics Research - ch1endi75No ratings yet
- 3706 CavinPolsonKallely ActuarialStatistics4 StationarityWeakStationarity&MarkovProperty CE2 Aug22Document16 pages3706 CavinPolsonKallely ActuarialStatistics4 StationarityWeakStationarity&MarkovProperty CE2 Aug22Anonymous ReaperNo ratings yet
- Chapter 3Document25 pagesChapter 3Jose C Beraun TapiaNo ratings yet
- Issues Using OLS with Time Series DataDocument61 pagesIssues Using OLS with Time Series DataWilliam OuyangNo ratings yet
- MEcon514 L7 221014Document13 pagesMEcon514 L7 221014Tasnim MuradNo ratings yet
- Econometrics Chapter 1 UNAVDocument38 pagesEconometrics Chapter 1 UNAVRachael VazquezNo ratings yet
- Decompose Time Series into Trend and Cyclical ComponentsDocument8 pagesDecompose Time Series into Trend and Cyclical ComponentsKalpana ThakurNo ratings yet
- Probability: Probability Theory and Stochastic Process - NagarjunaDocument22 pagesProbability: Probability Theory and Stochastic Process - Nagarjunaskumar165No ratings yet
- FRM_2_Chapter 2Document57 pagesFRM_2_Chapter 2Nguyễn Thị Mỹ HạnhNo ratings yet
- Moreno - Final ExaminationDocument4 pagesMoreno - Final ExaminationJan Luziel MorenoNo ratings yet
- Time-Series Econometrics ModelsDocument98 pagesTime-Series Econometrics ModelsAdel BenatekNo ratings yet
- Univariate Time SeriesDocument132 pagesUnivariate Time SeriesWesley Miller Perez OrtizNo ratings yet
- Simulation and Modeling-2Document19 pagesSimulation and Modeling-2mohammed.riad.bi.2020No ratings yet
- Chapter Six Stochastic Hydrology 5 Stochastic Hydrology 5.4: Engineering Hydrology Lecture NoteDocument24 pagesChapter Six Stochastic Hydrology 5 Stochastic Hydrology 5.4: Engineering Hydrology Lecture NoteKefene GurmessaNo ratings yet
- Unobserved Components Models in Economics and FinanceDocument34 pagesUnobserved Components Models in Economics and FinanceWennan SunNo ratings yet
- Chap1 Introduction - pt1 StudentDocument11 pagesChap1 Introduction - pt1 StudentKerel Anson WarrickNo ratings yet
- Stationary Process: ConttsDocument4 pagesStationary Process: ConttsAhmed AlzaidiNo ratings yet
- Simulation and Modeling-2Document19 pagesSimulation and Modeling-2mohammed.riad.bi.2020No ratings yet
- Error Correction Models ExplainedDocument16 pagesError Correction Models ExplainedJames DownesNo ratings yet
- Stationarity and Unit Root TestingDocument21 pagesStationarity and Unit Root TestingAwAtef LHNo ratings yet
- Time Series AnalysisDocument5 pagesTime Series AnalysisMaged Al-BarashiNo ratings yet
- What is Time Series Analysis? Understanding Trends & ForecastingDocument28 pagesWhat is Time Series Analysis? Understanding Trends & ForecastingNidhi KaushikNo ratings yet
- Stationary and Non-Stationary Time Series AnalysisDocument29 pagesStationary and Non-Stationary Time Series AnalysisRosendo Ramirez100% (1)
- 4 Linear Regression Models With Time Series DataDocument15 pages4 Linear Regression Models With Time Series DataAmera NajemNo ratings yet
- Timeseries ConceptsDocument19 pagesTimeseries Conceptsremya prakashNo ratings yet
- Hu - Time Series AnalysisDocument149 pagesHu - Time Series AnalysisMadMinarchNo ratings yet
- Pertemuan 8 StationeritasDocument84 pagesPertemuan 8 Stationeritaselpa heryantiNo ratings yet
- Ch8 Slides Ed3Document51 pagesCh8 Slides Ed3Trang NguyễnNo ratings yet
- Error Correction ModelDocument37 pagesError Correction ModelRollins JohnNo ratings yet
- Chapter 4Document102 pagesChapter 4berhanu seyoumNo ratings yet
- CT4Document6 pagesCT4vivek mittalNo ratings yet
- Rev-1 Final 1draft CompletDocument20 pagesRev-1 Final 1draft CompletHABTEMARIAM ERTBANNo ratings yet
- ProposalDocument36 pagesProposalHABTEMARIAM ERTBAN100% (1)
- Final ProposalDocument21 pagesFinal ProposalHABTEMARIAM ERTBANNo ratings yet
- Rev-1 Final 1draftDocument19 pagesRev-1 Final 1draftHABTEMARIAM ERTBANNo ratings yet
- Practical JinkaDocument23 pagesPractical JinkaHABTEMARIAM ERTBAN100% (5)
- Rev-1 Final 1draftDocument19 pagesRev-1 Final 1draftHABTEMARIAM ERTBANNo ratings yet
- Econometrics II Handout For StudentsDocument29 pagesEconometrics II Handout For StudentsHABTEMARIAM ERTBANNo ratings yet
- Theories of Firm Management and GrowthDocument79 pagesTheories of Firm Management and GrowthHABTEMARIAM ERTBANNo ratings yet
- Chapter 3Document3 pagesChapter 3HABTEMARIAM ERTBANNo ratings yet
- Your success depends on effortDocument13 pagesYour success depends on effortHABTEMARIAM ERTBANNo ratings yet
- Research ProposalDocument22 pagesResearch ProposalHABTEMARIAM ERTBANNo ratings yet
- Unit 6Document11 pagesUnit 6HABTEMARIAM ERTBANNo ratings yet
- Electronic Ticket Receipt, February 28 For MS HIWOT DESALEGN ABEBEDocument2 pagesElectronic Ticket Receipt, February 28 For MS HIWOT DESALEGN ABEBEHABTEMARIAM ERTBANNo ratings yet
- Group 2-4thDocument13 pagesGroup 2-4thHABTEMARIAM ERTBANNo ratings yet
- Chapter One: Introduction To EntrepreneurshipDocument42 pagesChapter One: Introduction To EntrepreneurshipYohannes Nakachew ZewodieNo ratings yet
- Dagim TeferiDocument5 pagesDagim TeferiHABTEMARIAM ERTBANNo ratings yet
- Final DraftDocument21 pagesFinal DraftHABTEMARIAM ERTBANNo ratings yet
- Overhead Projector GuideDocument12 pagesOverhead Projector GuideHABTEMARIAM ERTBANNo ratings yet
- FDocument89 pagesFjoseNo ratings yet
- Econometrics1 Cha2Document77 pagesEconometrics1 Cha2HABTEMARIAM ERTBANNo ratings yet
- Non Derogable Human Rights Under The Federal and Regional States Constitution of Ethiopia A Comparative AnalysisDocument15 pagesNon Derogable Human Rights Under The Federal and Regional States Constitution of Ethiopia A Comparative AnalysisHABTEMARIAM ERTBANNo ratings yet
- Consumer Expectations of Services: Donna J. Hill, Ph.D. Mtg.. 410 Fall 2000Document36 pagesConsumer Expectations of Services: Donna J. Hill, Ph.D. Mtg.. 410 Fall 2000Naveen KumarNo ratings yet
- ANZ Aboriginal history, culture, and demographicsDocument13 pagesANZ Aboriginal history, culture, and demographicsЛада ПоселянинаNo ratings yet
- ECG Synthtetic - Cloudias - 07311840000004Document8 pagesECG Synthtetic - Cloudias - 07311840000004Wheel ChairNo ratings yet
- Final Project: Compiled Chapter Test: Icaro, Joanne Bernadette GDocument18 pagesFinal Project: Compiled Chapter Test: Icaro, Joanne Bernadette GJoanne IcaroNo ratings yet
- Produk Fermentasi Tradisional Indonesia Berbahan Dasar Pangan Hewani (Daging Dan Ikan) : A ReviewDocument15 pagesProduk Fermentasi Tradisional Indonesia Berbahan Dasar Pangan Hewani (Daging Dan Ikan) : A Reviewfebriani masrilNo ratings yet
- Pioneers of Modern Architecture: Maseana ProjectDocument86 pagesPioneers of Modern Architecture: Maseana ProjectEriNo ratings yet
- M5 - Freedom of The Human PersonDocument8 pagesM5 - Freedom of The Human PersonMarisol OtidaNo ratings yet
- Eskin Seminar ReportDocument18 pagesEskin Seminar ReportKalyan HvNo ratings yet
- Dual Nature of Radiation and Matter PDFDocument18 pagesDual Nature of Radiation and Matter PDFLakshit SharmaNo ratings yet
- Stormwater Survey Gauges Rizal Tech University DesignDocument1 pageStormwater Survey Gauges Rizal Tech University DesignAlejandroGonzagaNo ratings yet
- Garlic As Mosquito RepellentDocument18 pagesGarlic As Mosquito Repellentagnes80% (5)
- MTech Seminar II and Project SyllabusDocument3 pagesMTech Seminar II and Project SyllabusrcherrNo ratings yet
- WEG Pump Genius 50059602 Brochure enDocument20 pagesWEG Pump Genius 50059602 Brochure enGabriel AraújoNo ratings yet
- Developmental Psychology-Revised 2018Document51 pagesDevelopmental Psychology-Revised 2018Aadya PoddarNo ratings yet
- Visual Division-1Document3 pagesVisual Division-1Jumran BaharNo ratings yet
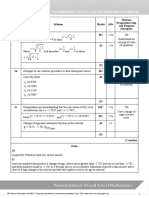
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- DashaDocument2 pagesDashaSrini VasanNo ratings yet
- Automatic Bus Suspension PID Controller DesignDocument50 pagesAutomatic Bus Suspension PID Controller Designchuhuynh100% (1)
- Land Capability Unit of Erosion in Gis Application For Kalikajar District, Wonosobo RegencyDocument6 pagesLand Capability Unit of Erosion in Gis Application For Kalikajar District, Wonosobo Regencyarmeino atanaNo ratings yet
- MTEX Plot Pole Figures and Inverse Pole FiguresDocument9 pagesMTEX Plot Pole Figures and Inverse Pole FiguresIniyan Thiruselvam Navaladi KarthikeyanNo ratings yet
- Zinc Clad II (85) : Inorganic Zinc Rich CoatingDocument2 pagesZinc Clad II (85) : Inorganic Zinc Rich CoatingKatherine Marimón JiménezNo ratings yet
- EE129 Answers 724Document12 pagesEE129 Answers 724gma.roseangelikaNo ratings yet
- EONSOLV 135 MSDS Safety DataDocument11 pagesEONSOLV 135 MSDS Safety DataChristiyan Chandra AntonoNo ratings yet
- DLP For UCSPDocument6 pagesDLP For UCSPruth taccadNo ratings yet
- Ecotourism EssayDocument2 pagesEcotourism EssayKarenNo ratings yet
- ESE 601 Week 4 Assignment Universal Learning Characteristic1Document5 pagesESE 601 Week 4 Assignment Universal Learning Characteristic1Homeworkhelpbylance0% (1)
- Experiencias Cercanas A La Muerte PDFDocument18 pagesExperiencias Cercanas A La Muerte PDFGabriel MoraguesNo ratings yet
- How to Win Friends and Influence PeopleDocument7 pagesHow to Win Friends and Influence PeoplejzeaNo ratings yet
- Demystifying Interventional Radiology A Guide For Medical StudentsDocument195 pagesDemystifying Interventional Radiology A Guide For Medical StudentsMo Haroon100% (1)
- Rate Constant 2Document4 pagesRate Constant 2ShabanaNo ratings yet
- Grade 10 Biology Week 8 Lesson 2 Worksheet 1 and SolutionsDocument4 pagesGrade 10 Biology Week 8 Lesson 2 Worksheet 1 and SolutionsAva HoNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)