You might also like
- White Lies - Core RulebookDocument136 pagesWhite Lies - Core RulebookThiago AlmeidaNo ratings yet
- The Practical Welding EngineerDocument154 pagesThe Practical Welding EngineerMohamed Atef0% (1)
- ES vs SIGINT: Understanding the DifferencesDocument9 pagesES vs SIGINT: Understanding the DifferencesYasir ShigileeniNo ratings yet
- Discover Over 70 Player Classes and RacesDocument1 pageDiscover Over 70 Player Classes and RacesFred FrançaNo ratings yet
- ISO 8062-2 - Usada Pela MicDocument25 pagesISO 8062-2 - Usada Pela MicmarceloNo ratings yet
- Block Diagram Pin DefinesDocument47 pagesBlock Diagram Pin DefinesRamdas KambleNo ratings yet
- User Manual: HGM9510 Genset Parallel (With Genset) UnitDocument65 pagesUser Manual: HGM9510 Genset Parallel (With Genset) Unitnhocti007100% (1)
- Iso 11898 1 2015Document15 pagesIso 11898 1 2015Davi MoreiraNo ratings yet
- Detailed Lesson Plan Boyle's LawDocument9 pagesDetailed Lesson Plan Boyle's LawTeacher Derick Daet86% (7)
- Water Spray Nozzle: Fire Fighting Equipment Data SheetDocument7 pagesWater Spray Nozzle: Fire Fighting Equipment Data SheetJosef MadronaNo ratings yet
- Technical Documentation - NB547234 - V2 (2021 - 03 - 15 10 - 13 - 54 UTC)Document24 pagesTechnical Documentation - NB547234 - V2 (2021 - 03 - 15 10 - 13 - 54 UTC)Mike Olumide JohnsonNo ratings yet
- Iso 11898 3 2006 en PDFDocument11 pagesIso 11898 3 2006 en PDFSebastian Linares RugelesNo ratings yet
- Iso 11898 3 2006 en PDFDocument11 pagesIso 11898 3 2006 en PDFSebastian Linares RugelesNo ratings yet
- NXP CanDrv IntegrationHintDocument59 pagesNXP CanDrv IntegrationHintNguyễn Lê Nhật ThắngNo ratings yet
- Crash Analysis Criteria 1.6.2Document90 pagesCrash Analysis Criteria 1.6.2Gustavo MoralesNo ratings yet
- Common Carrier RulingDocument4 pagesCommon Carrier RulingChic PabalanNo ratings yet
- Philips Az787-61 Ver 1 0Document26 pagesPhilips Az787-61 Ver 1 0Roman servisNo ratings yet
- PCMCIA Wireless LAN Card: User's ManualDocument48 pagesPCMCIA Wireless LAN Card: User's Manualrecompacted100% (1)
- R2A20291AFTDocument25 pagesR2A20291AFTGautam Balhara100% (1)
- Sansung Arm Cortex m3 - s3fm02g - Brochure-0Document2 pagesSansung Arm Cortex m3 - s3fm02g - Brochure-0alexandre.oneill2479100% (1)
- Webpower Help: User'S GuideDocument272 pagesWebpower Help: User'S GuideDerek BNo ratings yet
- Programador PsocDocument4 pagesProgramador PsocMartín SayagoNo ratings yet
- Si9933BDY Dual P-Channel 2.5-V (G-S) MOSFET: Vishay SiliconixDocument6 pagesSi9933BDY Dual P-Channel 2.5-V (G-S) MOSFET: Vishay Siliconixdulah kemprohNo ratings yet
- Max 4 Max 41103016080000 13130251 002 Elau ManualDocument22 pagesMax 4 Max 41103016080000 13130251 002 Elau ManualLyes TAGGUEBNo ratings yet
- TSL602MEF0Document51 pagesTSL602MEF0AlphaNo ratings yet
- Warning !: Revisions Description Ecn No. Date RevDocument3 pagesWarning !: Revisions Description Ecn No. Date Revaw100% (1)
- 1.5-Ghz Prescaler For Frequency Meters: R. BönschDocument3 pages1.5-Ghz Prescaler For Frequency Meters: R. BönschCarlos Molins LopezNo ratings yet
- 170W Class D Amplifier Schematic DiagramDocument3 pages170W Class D Amplifier Schematic DiagramIrimia Mihai AdrianNo ratings yet
- HP W19e LCD Monitor Service ManualDocument112 pagesHP W19e LCD Monitor Service Manualoyrrb100% (1)
- TP MT5522S PC822+Shivaki+STV-50LED23SDocument29 pagesTP MT5522S PC822+Shivaki+STV-50LED23SMarcelo MoreiraNo ratings yet
- 321 Aim Pectel T6 100 EngDocument5 pages321 Aim Pectel T6 100 EngmisdeismoNo ratings yet
- Elonics E4000 Low Power CMOS Multi Band Tuner DatasheetDocument59 pagesElonics E4000 Low Power CMOS Multi Band Tuner DatasheetbenryanauNo ratings yet
- Kirisun PT260-Service-ManualDocument29 pagesKirisun PT260-Service-ManualRobertinoNo ratings yet
- Electric Power Steering PassoDocument16 pagesElectric Power Steering PassoCruz StarzNo ratings yet
- Ssc5x86h ManDocument29 pagesSsc5x86h ManValdenir DuarteNo ratings yet
- TOYO INTELLIGENT INVERTER INSTRUCTION MANUALDocument117 pagesTOYO INTELLIGENT INVERTER INSTRUCTION MANUALfathazamNo ratings yet
- LG 42pa4500-Um 42pa450c-Um Chassis Pu23aDocument48 pagesLG 42pa4500-Um 42pa450c-Um Chassis Pu23aLalo NajeraNo ratings yet
- Features: When Fitted On A 2600 PCB This Chip Will Work But Needs Some Modification of Hardware For Full FonctionsDocument114 pagesFeatures: When Fitted On A 2600 PCB This Chip Will Work But Needs Some Modification of Hardware For Full Fonctions肖磊No ratings yet
- Grand Am Continental Tire Sports Integrating ECU PDFDocument31 pagesGrand Am Continental Tire Sports Integrating ECU PDFsenthilvlNo ratings yet
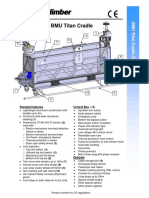
- BMU Titan Cradle: Standard Features Control BoxDocument2 pagesBMU Titan Cradle: Standard Features Control BoxKashyapNo ratings yet
- Omnidirectional Base Station SolutionsDocument12 pagesOmnidirectional Base Station SolutionsAlejandro MascorroNo ratings yet
- LG K4 2017 X230DS - SVC - Manual - V1.0 - 170320 PDFDocument122 pagesLG K4 2017 X230DS - SVC - Manual - V1.0 - 170320 PDFjsouza souzaNo ratings yet
- 4 X 45W Quad Bridge Car Radio Amplifier Plus HSD: 1 FeaturesDocument11 pages4 X 45W Quad Bridge Car Radio Amplifier Plus HSD: 1 FeaturesAngel Quiñones0% (1)
- Coban TK303 Auto Gps Tracker - User ManualDocument25 pagesCoban TK303 Auto Gps Tracker - User ManualAlberto CastañedaNo ratings yet
- Datasheet R5F 100AAA PDFDocument202 pagesDatasheet R5F 100AAA PDFAnand Mugale100% (1)
- Hcs02.1e W0054 Indra Drive C Rexroth ManualDocument358 pagesHcs02.1e W0054 Indra Drive C Rexroth ManualKen Lim100% (1)
- Rev: A: Page Title of SchematicDocument35 pagesRev: A: Page Title of SchematicLuis Alberto ArizaNo ratings yet
- VDO Levelgauges 12-24VDocument4 pagesVDO Levelgauges 12-24VrfffffNo ratings yet
- 8 Corolla / Auris (Cont. Next Page) : Engine Control (1ZR-FE, 2ZR-FE)Document5 pages8 Corolla / Auris (Cont. Next Page) : Engine Control (1ZR-FE, 2ZR-FE)Amal TharakaNo ratings yet
- Inverter AssemblyDocument25 pagesInverter AssemblyNguyễn Khắc TâmNo ratings yet
- 2-Way Car Al Arm System: Instruction ManualDocument32 pages2-Way Car Al Arm System: Instruction ManualJOSE CAMPOSNo ratings yet
- Rfid Security Access Control System: Submitted byDocument20 pagesRfid Security Access Control System: Submitted byVale Conde CuatzoNo ratings yet
- MT6572 HSPA Smartphone Application Processor 1.0Document64 pagesMT6572 HSPA Smartphone Application Processor 1.0MechDRNo ratings yet
- Zed-Prog User Manual for EEPROM and MCU ProgrammingDocument131 pagesZed-Prog User Manual for EEPROM and MCU Programmingnjuskalo1986No ratings yet
- 38 PinDocument2 pages38 Pinfilonzi85No ratings yet
- Oneforall PDFDocument824 pagesOneforall PDFgomoxNo ratings yet
- STC 12Document439 pagesSTC 12Marcano Figueroa bethania LeonorNo ratings yet
- SONGZ AC Maintenance ManualDocument150 pagesSONGZ AC Maintenance ManualChris MoralesNo ratings yet
- 2.5l Petrol Engine, DAZA: Current Flow DiagramDocument24 pages2.5l Petrol Engine, DAZA: Current Flow DiagramildefonsoNo ratings yet
- Tps 65148Document31 pagesTps 65148Jessica Jhon100% (1)
- 50hz Sine PWM Using Tms320f2812 DSPDocument10 pages50hz Sine PWM Using Tms320f2812 DSPsivananda11No ratings yet
- RDM6300Document4 pagesRDM6300Raheel IttefaqNo ratings yet
- Am29f400bb 90si Amd Datasheet 72825Document5 pagesAm29f400bb 90si Amd Datasheet 72825Joel AgbekponouNo ratings yet
- BC-348-R Receiver, K2CBYDocument42 pagesBC-348-R Receiver, K2CBYst69No ratings yet
- BIOSTAR'S INDEX DOCUMENTDocument47 pagesBIOSTAR'S INDEX DOCUMENTTimurNo ratings yet
- JT-NM TR-1001-1 2020 v1.1Document19 pagesJT-NM TR-1001-1 2020 v1.1tahar.mail17No ratings yet
- G 709V3 ApprovedDocument221 pagesG 709V3 Approveddkataria7No ratings yet
- GSM T SDocument16 pagesGSM T StheraphimNo ratings yet
- Ourdev 515259Document25 pagesOurdev 515259Davi MoreiraNo ratings yet
- Iso 11898 5 2007Document11 pagesIso 11898 5 2007Davi MoreiraNo ratings yet
- Ourdev 515259Document25 pagesOurdev 515259Davi MoreiraNo ratings yet
- Statim 2000 & 5000 Op Manual 5.0Document47 pagesStatim 2000 & 5000 Op Manual 5.0Davi MoreiraNo ratings yet
- Base Delivery Set for Neuro-EMG-Micro SystemDocument2 pagesBase Delivery Set for Neuro-EMG-Micro SystemDavi MoreiraNo ratings yet
- Nonin 7500Document44 pagesNonin 7500Davi MoreiraNo ratings yet
- Nonin 2500A Manual OperaçãoDocument40 pagesNonin 2500A Manual OperaçãoDavi MoreiraNo ratings yet
- Operator'S Manual: Model 2500 PalmsatDocument37 pagesOperator'S Manual: Model 2500 PalmsatDavi MoreiraNo ratings yet
- AED Plus Administrators GuideDocument52 pagesAED Plus Administrators GuideDavi MoreiraNo ratings yet
- Carefusion Alaris CC PlusDocument50 pagesCarefusion Alaris CC PlusDavi MoreiraNo ratings yet
- Carefusion Alaris EnteralDocument34 pagesCarefusion Alaris EnteralDavi MoreiraNo ratings yet
- Technical Manual: MR810 Respiratory HumidifierDocument43 pagesTechnical Manual: MR810 Respiratory HumidifierRodrigo Paniagua FloresNo ratings yet
- AED Plus Operators GuideDocument2 pagesAED Plus Operators GuideDavi MoreiraNo ratings yet
- Solitaire Premier - Presentation (Small File)Document18 pagesSolitaire Premier - Presentation (Small File)Shrikant BadheNo ratings yet
- Singaporean Notices To Mariners: Section ContentDocument35 pagesSingaporean Notices To Mariners: Section ContentGaurav SoodNo ratings yet
- 21st Century Science - Summer 2011 - The Universe Is CreativeDocument84 pages21st Century Science - Summer 2011 - The Universe Is CreativeMatthew EhretNo ratings yet
- Final Seminar ReportDocument35 pagesFinal Seminar ReportHrutik BhandareNo ratings yet
- Roland Berger Hot Trends InconstructionDocument24 pagesRoland Berger Hot Trends InconstructionJavier ContrerasNo ratings yet
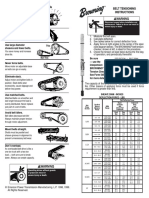
- Browning Belt Tension GaugeDocument2 pagesBrowning Belt Tension GaugeJasperken2xNo ratings yet
- Oxford SuprEsser ManualDocument34 pagesOxford SuprEsser ManualaaaNo ratings yet
- 3 Soal Ganjil Inggris MaritimDocument8 pages3 Soal Ganjil Inggris MaritimFikri Mu'izNo ratings yet
- Chapter 3Document58 pagesChapter 3hasanNo ratings yet
- MSDS 442 BulkDocument2 pagesMSDS 442 BulkEliasNo ratings yet
- Zooniverse Book 2022Document28 pagesZooniverse Book 2022Dr Pankaj DhussaNo ratings yet
- Biomass and Bioenergy: Z.N. Akhlisah, R. Yunus, Z.Z. Abidin, B.Y. Lim, D. KaniaDocument20 pagesBiomass and Bioenergy: Z.N. Akhlisah, R. Yunus, Z.Z. Abidin, B.Y. Lim, D. KaniaPutri sinagaNo ratings yet
- Practical 7 - Angiosperms Marking Guide Exercise 1: Class DicotyledonsDocument3 pagesPractical 7 - Angiosperms Marking Guide Exercise 1: Class DicotyledonsDitiro Maletsanake50% (2)
- management of burns readingDocument28 pagesmanagement of burns readinghimanshugupta811997No ratings yet
- What Is A Supply ChainDocument20 pagesWhat Is A Supply ChainThanh Binh Tran NguyenNo ratings yet
- Definisi, Karakteristik dan Contoh Aplikasi SIGDocument28 pagesDefinisi, Karakteristik dan Contoh Aplikasi SIGtoyota taaNo ratings yet
- Water Quality Notes: Alkalinity and Hardness: P. Chris WilsonDocument6 pagesWater Quality Notes: Alkalinity and Hardness: P. Chris WilsonrishabhNo ratings yet
- Systems Design: Job-Order Costing and Process Costing: MANAGEMENT ACCOUNTING - Solutions ManualDocument16 pagesSystems Design: Job-Order Costing and Process Costing: MANAGEMENT ACCOUNTING - Solutions ManualBianca LizardoNo ratings yet
- Lab ReportDocument9 pagesLab ReportQi Yi TanNo ratings yet
- Eliminating False Detection: Sensing Guide Pulse Level SensorDocument16 pagesEliminating False Detection: Sensing Guide Pulse Level SensorRafael MirandaNo ratings yet
- Fesh S A0001171549 1Document7 pagesFesh S A0001171549 1ismuNo ratings yet
- Changing Landscape and Ecotourism Development in A Large Dam SiteDocument16 pagesChanging Landscape and Ecotourism Development in A Large Dam Siteವಿನಯ್ ಎಮ್. ಆರ್No ratings yet
- Fundamentals of Wind EnergyDocument24 pagesFundamentals of Wind EnergyMas3odNo ratings yet