You might also like
- B3Document12 pagesB3EMMANUEL BOADINo ratings yet
- Proximity Sensor Project: Using Sharp Distance Measuring Sensor Unit (Analog Output Type) and Arduino Uno BoardDocument15 pagesProximity Sensor Project: Using Sharp Distance Measuring Sensor Unit (Analog Output Type) and Arduino Uno BoardMohdPadzlyRadziFrenskedahphotography100% (1)
- 24K Mech Lab-IS ExtDocument3 pages24K Mech Lab-IS ExtVikasNo ratings yet
- Coursera Robot Simulator Guide: Control Mobile RobotsDocument14 pagesCoursera Robot Simulator Guide: Control Mobile RobotsMridul UpadhyayNo ratings yet
- Lab Procedure Wi 71Document3 pagesLab Procedure Wi 71VikasNo ratings yet
- Arduino Based Automatic Wireless Weather Station With Remote Graphical Application and AlertsDocument26 pagesArduino Based Automatic Wireless Weather Station With Remote Graphical Application and AlertsJitendra KaseraNo ratings yet
- Evidence 2 English Presentation VideoDocument21 pagesEvidence 2 English Presentation VideoARAIZA FLORES EMMANUELNo ratings yet
- Digital Ultrasonic Flaw DetectorDocument4 pagesDigital Ultrasonic Flaw DetectorFranz Quiroz AmayaNo ratings yet
- Control of Mobile Robots - Week 2Document10 pagesControl of Mobile Robots - Week 2Mridul UpadhyayNo ratings yet
- Coursera Robot Simulator GuideDocument10 pagesCoursera Robot Simulator GuideDũng PhanNo ratings yet
- Design and Fabrication of A Radar System Using Power PointDocument17 pagesDesign and Fabrication of A Radar System Using Power PointOyadare sarahNo ratings yet
- Measure signals and understand RC circuitsDocument15 pagesMeasure signals and understand RC circuitsjacksonNo ratings yet
- URNDT UTS-280 Digital Ultrasonic Flaw DetectorDocument4 pagesURNDT UTS-280 Digital Ultrasonic Flaw DetectorGabo Nacho HerberNo ratings yet
- I To V Converter PCB DesignDocument8 pagesI To V Converter PCB DesignJayant Kumar PathakNo ratings yet
- Robotic Arm Control Via EMG SignalDocument25 pagesRobotic Arm Control Via EMG SignalUlises Gordillo ZapanaNo ratings yet
- By Samik Dutta, Somnath Chatterjee, Ranjan Sen CMERI DurgapurDocument15 pagesBy Samik Dutta, Somnath Chatterjee, Ranjan Sen CMERI DurgapurSamik DuttaNo ratings yet
- Lab # 3 - Proximity Sensor LabDocument7 pagesLab # 3 - Proximity Sensor Labmourice0% (1)
- Evaluation of A Low-Cost IEEE802.11n MIMO TestbedDocument12 pagesEvaluation of A Low-Cost IEEE802.11n MIMO TestbedaadmurthyNo ratings yet
- LTE Throughput vs DistanceDocument5 pagesLTE Throughput vs Distanceneha yarrapothuNo ratings yet
- LABORATORY 5. Automations Using Ultrasonic Snesor and DC MotorDocument7 pagesLABORATORY 5. Automations Using Ultrasonic Snesor and DC MotorPatrick Vallon100% (2)
- Spying Swarm Robots For Military ApplicationsDocument39 pagesSpying Swarm Robots For Military ApplicationsRishi ChawlaNo ratings yet
- System Architecture: Vol-4 Issue-5 2018Document8 pagesSystem Architecture: Vol-4 Issue-5 2018Gnanam RNo ratings yet
- B.SC Project, July 2010: HMI & PLC Controlled Conveyor System For Factory AutomationDocument48 pagesB.SC Project, July 2010: HMI & PLC Controlled Conveyor System For Factory AutomationDolly CotwNo ratings yet
- Proposal Micro ProcessorDocument13 pagesProposal Micro ProcessorZakwan JohariNo ratings yet
- GuidelinesTemplates For Lab WorksDocument38 pagesGuidelinesTemplates For Lab Worksdarya04yNo ratings yet
- Radar Arduino ProjectDocument17 pagesRadar Arduino ProjectDARSHAN KUDACHENo ratings yet
- Radar System ReportDocument13 pagesRadar System ReportAdebunmi HabeebNo ratings yet
- Bur QC Data 171220Document1 pageBur QC Data 171220Brahmananda ChakrabortyNo ratings yet
- EE102 LAB 5: Fundamentals of Electronics InstrumentationDocument11 pagesEE102 LAB 5: Fundamentals of Electronics InstrumentationYme WyouNo ratings yet
- Digital CaliperDocument18 pagesDigital Caliperdzaky fawwazNo ratings yet
- Distance measurement by Ultrasonic SensorDocument3 pagesDistance measurement by Ultrasonic SensorSajjadul IslamNo ratings yet
- Sim.I.am - A Robot SimulatorDocument27 pagesSim.I.am - A Robot Simulatoryashar2500No ratings yet
- V1 V2 Cal PRCDocument5 pagesV1 V2 Cal PRCCyril J PadiyathNo ratings yet
- Standard Etape Data Sheet - Regleta de NivelDocument2 pagesStandard Etape Data Sheet - Regleta de NivelJulián CamargoNo ratings yet
- Etape: Continuous Fluid Level Sensor Pn-12110215Tc-XDocument2 pagesEtape: Continuous Fluid Level Sensor Pn-12110215Tc-XMohsin razaNo ratings yet
- Continuous Fluid Sensor Measures LevelsDocument2 pagesContinuous Fluid Sensor Measures LevelsJorge FroylanNo ratings yet
- Lab Report 3 - Edm Calibration: AbstractDocument2 pagesLab Report 3 - Edm Calibration: AbstractAman JainNo ratings yet
- Nguyen Huy Hung - Nguyen Van Huy - Pham Phuong NamDocument7 pagesNguyen Huy Hung - Nguyen Van Huy - Pham Phuong NamQuốc Đạt ĐồngNo ratings yet
- dynamic-vs-4-20-ma-accelerometersDocument5 pagesdynamic-vs-4-20-ma-accelerometersalexmantilla80No ratings yet
- JITAI910 Digital Ultrasonic Flaw Detector: Beijing Jitai Tech Detection Device Co.,LtdDocument3 pagesJITAI910 Digital Ultrasonic Flaw Detector: Beijing Jitai Tech Detection Device Co.,Ltdلوبيز إديسونNo ratings yet
- ULTRASONIC DISTANCE-ProposalDocument12 pagesULTRASONIC DISTANCE-Proposaladidas tempoNo ratings yet
- IoT Based Water Level Indicator Using Ultrasonic SensorDocument11 pagesIoT Based Water Level Indicator Using Ultrasonic Sensorsri kanthNo ratings yet
- Control Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiDocument27 pagesControl Systems Laboratory: Hamza OSAMA &haider Jamal&salah MahdiAhmed Mohammed khalfNo ratings yet
- IRJET V4I6575 With Cover Page v2Document5 pagesIRJET V4I6575 With Cover Page v2Monisha S.No ratings yet
- NodeMCU ESP8266 WiFi Module GuideDocument6 pagesNodeMCU ESP8266 WiFi Module GuideHareesh HarshaNo ratings yet
- Umar 2 PracticalDocument4 pagesUmar 2 PracticalAbdullah ZubairNo ratings yet
- EC221 CES511 Subject Code Course Institution Lab TopicDocument3 pagesEC221 CES511 Subject Code Course Institution Lab TopicAzam UddinNo ratings yet
- SLM-250 Datasheet en 01-ADocument2 pagesSLM-250 Datasheet en 01-Aborja12340% (1)
- Pm-Propagation-Delay - Brief DescriptionDocument7 pagesPm-Propagation-Delay - Brief Descriptionmola argawNo ratings yet
- PM Propagation DelayDocument7 pagesPM Propagation DelayMek WoluNo ratings yet
- Radar System Object DetectionDocument9 pagesRadar System Object DetectionPeerzada WahidNo ratings yet
- Goniophotometers System Test Report Page 1 of 9Document9 pagesGoniophotometers System Test Report Page 1 of 9Samuel BobbyNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemHoomi ShbNo ratings yet
- Dayananda Sagar College of Engineering: Arduino Radar ProjectDocument13 pagesDayananda Sagar College of Engineering: Arduino Radar ProjectSiddharth JNo ratings yet
- Department of Electronic Engineering: "Design of An Arduino Based Radar System"Document8 pagesDepartment of Electronic Engineering: "Design of An Arduino Based Radar System"Meer Zafarullah Noohani0% (1)
- Rancang Bangun Alat Ukur Parameter Solar Panel (SNP2M 2017)Document6 pagesRancang Bangun Alat Ukur Parameter Solar Panel (SNP2M 2017)kurnia naimNo ratings yet
- Installation and Calibration of Newly Installed X-Ray Machines - Anonas Diagnostic ClinicDocument3 pagesInstallation and Calibration of Newly Installed X-Ray Machines - Anonas Diagnostic ClinicTeresita AlcaideNo ratings yet
- Robotic Arm With Smart Phone Control: A10-Batch MembersDocument25 pagesRobotic Arm With Smart Phone Control: A10-Batch MembersSunil Varma VeeravalliNo ratings yet
- UntitledDocument11 pagesUntitledAashutosh PratapNo ratings yet
- UntitledDocument2 pagesUntitledAashutosh PratapNo ratings yet
- EE492 ExamDocument12 pagesEE492 ExamAashutosh PratapNo ratings yet
- Ee492 MST 2022Document4 pagesEe492 MST 2022Aashutosh PratapNo ratings yet
- EE392 ExamDocument12 pagesEE392 ExamAashutosh PratapNo ratings yet
- EE392 Digital Signal Processing Final Exam QuestionsDocument10 pagesEE392 Digital Signal Processing Final Exam QuestionsAashutosh PratapNo ratings yet
- PPG Hi-Temp™ 1027 HDDocument5 pagesPPG Hi-Temp™ 1027 HDMarleo MorenoNo ratings yet
- 22nd Annual Report 2021-22Document155 pages22nd Annual Report 2021-22Karthic Selvam KandavelNo ratings yet
- Analysis of Cantilever Retaining Wall MathcadDocument4 pagesAnalysis of Cantilever Retaining Wall MathcadNéstor Walter Barrera RomeroNo ratings yet
- Hydrocarbon ReactionsDocument2 pagesHydrocarbon ReactionsJessa Libo-onNo ratings yet
- DTP - Digital Transformer ProtectionDocument13 pagesDTP - Digital Transformer ProtectionHBNBILNo ratings yet
- Cast Steel y Strainer Ansi Class 150Document2 pagesCast Steel y Strainer Ansi Class 150aurinkokelloNo ratings yet
- Manual stack emission monitoring standardDocument29 pagesManual stack emission monitoring standardsantisal11No ratings yet
- Form Vs Content in P.K. Dick's The Father ThingDocument4 pagesForm Vs Content in P.K. Dick's The Father ThingFrank BertrandNo ratings yet
- Cats Meow Edition 3 PDFDocument320 pagesCats Meow Edition 3 PDFbrunokfouriNo ratings yet
- Unit 1 Unit 2 Unit 3 DIFFERENTIAL CALCULUS 1 2 3 PDFDocument124 pagesUnit 1 Unit 2 Unit 3 DIFFERENTIAL CALCULUS 1 2 3 PDFjayaram prakash kNo ratings yet
- Fox em Corporate Presentation 08 2022Document19 pagesFox em Corporate Presentation 08 2022Pierluigi GhioneNo ratings yet
- L1 Finding Nemo Teacher Notes American EnglishDocument9 pagesL1 Finding Nemo Teacher Notes American Englishcris_simescuNo ratings yet
- LastDocument6 pagesLastandypressNo ratings yet
- PSPD Activity 3Document4 pagesPSPD Activity 3laurynnaNo ratings yet
- Topic 1 - Textile Finishing - 2020 PDFDocument11 pagesTopic 1 - Textile Finishing - 2020 PDFSadaf SweetNo ratings yet
- Agribusiness ManagementDocument20 pagesAgribusiness Managementronald_leabresNo ratings yet
- Literature ReviewDocument2 pagesLiterature ReviewFaith Arpon AbogandaNo ratings yet
- Analyzing the Effects of Changing the Values of a, b, and c in the Equation of a Quadratic Function on Its GraphDocument13 pagesAnalyzing the Effects of Changing the Values of a, b, and c in the Equation of a Quadratic Function on Its GraphRamil NacarioNo ratings yet
- 3 Uscg BWM VRPDocument30 pages3 Uscg BWM VRPdivinusdivinusNo ratings yet
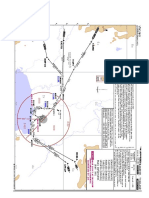
- VTBS 20-3DDocument1 pageVTBS 20-3Dwong keen faivNo ratings yet
- Chapter 2 - Coordinate GeometryDocument73 pagesChapter 2 - Coordinate GeometryFILIP CEZARNo ratings yet
- Due Amount: We're ListeningDocument2 pagesDue Amount: We're ListeningYogesh PawarNo ratings yet
- Zaldivar Et Al. 2017 (Dopamine Is Signaled by Mid-Frequency Oscillations and Boosts Output Layers Visual Information in Visual Cortex)Document30 pagesZaldivar Et Al. 2017 (Dopamine Is Signaled by Mid-Frequency Oscillations and Boosts Output Layers Visual Information in Visual Cortex)FRANCISCO ELI LEZAMA GUTIERREZNo ratings yet
- Pacemaker 180508042454Document86 pagesPacemaker 180508042454padmaNo ratings yet
- Chip Mong Noro Mall: Property OverviewDocument4 pagesChip Mong Noro Mall: Property OverviewHe VansakNo ratings yet
- ABR College Mechanical Mid Exam Questions on MetrologyDocument1 pageABR College Mechanical Mid Exam Questions on MetrologySrinu ArnuriNo ratings yet
- DD 24 DD 22Document2 pagesDD 24 DD 22evega97No ratings yet
- Sui Gas Connection FormsDocument1 pageSui Gas Connection Formsare50% (2)
- Modeling Endocrine Control of The Pituitary-Ovarian Axis: Androgenic Influence and Chaotic DynamicsDocument22 pagesModeling Endocrine Control of The Pituitary-Ovarian Axis: Androgenic Influence and Chaotic DynamicsKerin ArdyNo ratings yet
- D.K.Pandey: Lecture 1: Growth and Decay of Current in RL CircuitDocument5 pagesD.K.Pandey: Lecture 1: Growth and Decay of Current in RL CircuitBBA UniversityNo ratings yet