You might also like
- Lecture 2Document43 pagesLecture 2Dimuth S. PeirisNo ratings yet
- Andrew Geldenhuys 31648118 EERI321 PracticalDocument10 pagesAndrew Geldenhuys 31648118 EERI321 PracticalAndrew GeldenhuysNo ratings yet
- Lab3 2Document49 pagesLab3 2علاء الدين العولقيNo ratings yet
- Dynamic Systems, Modeling & Simulation: Mathematical Model of Physical SystemsDocument35 pagesDynamic Systems, Modeling & Simulation: Mathematical Model of Physical SystemsKerem Yaman100% (1)
- Linearization SsDocument29 pagesLinearization SsMY PRACTICENo ratings yet
- Design of Integral Sliding Mode Controller For Servo DC MotorDocument7 pagesDesign of Integral Sliding Mode Controller For Servo DC MotorTolcha LemmaNo ratings yet
- Topic 2. Matemethical Modelling of Control Systems V1Document13 pagesTopic 2. Matemethical Modelling of Control Systems V1xREDCivicCometxNo ratings yet
- Lecture 1Document22 pagesLecture 1onuraktas1923No ratings yet
- 03 LagrangianDynamics 1Document29 pages03 LagrangianDynamics 1Exequiel RemersaroNo ratings yet
- Laplace Transform Modeling ProcessDocument21 pagesLaplace Transform Modeling ProcessMOHAMMED FahmyNo ratings yet
- School of Electrical and Computer EngineeringDocument19 pagesSchool of Electrical and Computer EngineeringSurafel TadesseNo ratings yet
- ControlofaNonlinearandLinearizedModelofSelf balancingElectricMotorcycle PDFDocument13 pagesControlofaNonlinearandLinearizedModelofSelf balancingElectricMotorcycle PDFPhương Hoàng VănNo ratings yet
- 19A301 ReportDocument7 pages19A301 ReportAbrajith MNo ratings yet
- PDE OverviewDocument334 pagesPDE OverviewEngwarwickNo ratings yet
- CEIC3000 Process Modelling and Analysis Week 1 Session 1, 2012Document17 pagesCEIC3000 Process Modelling and Analysis Week 1 Session 1, 2012Ben TanNo ratings yet
- Automatic Control 2 NotesDocument38 pagesAutomatic Control 2 NotesÇağın OkuyucuNo ratings yet
- Evaluation of Block-Oriented Models Use For The Purpose of Robust Controllers SynthesisDocument9 pagesEvaluation of Block-Oriented Models Use For The Purpose of Robust Controllers SynthesisJhonathanCamposResendeNo ratings yet
- Chapter-2Document27 pagesChapter-2hailegebreselassie24No ratings yet
- Lecture 1Document8 pagesLecture 1akhbar elyoum academyNo ratings yet
- Rasouli 2016Document5 pagesRasouli 2016ekupovina.djordjevic.mil87No ratings yet
- Formula Sheet - Final ExamDocument6 pagesFormula Sheet - Final ExamAdwoa Osei-AkotoNo ratings yet
- Lecture 1 Non Linear ControlDocument21 pagesLecture 1 Non Linear ControlShivan BiradarNo ratings yet
- ch02 Ogata RDocument19 pagesch02 Ogata RAueqn HeusNo ratings yet
- PIContoller Researchand DesignDocument14 pagesPIContoller Researchand DesignRASCOR VADERNo ratings yet
- Informe IEEE - Baltazar - Palma - ParedesDocument12 pagesInforme IEEE - Baltazar - Palma - ParedesBranco Palma RodriguezNo ratings yet
- Chapter 2slideDocument103 pagesChapter 2slideYared brhaneNo ratings yet
- Tubular Reactor With Side InjectionsDocument17 pagesTubular Reactor With Side InjectionsMohamad Abou DaherNo ratings yet
- Control system-II: Department of Electrical EngineeringDocument17 pagesControl system-II: Department of Electrical Engineeringpala abishayNo ratings yet
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 pagesA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeNo ratings yet
- Control System and Feedback: Manuel S. Enverga University FoundationDocument32 pagesControl System and Feedback: Manuel S. Enverga University Foundationlemuel mabilinNo ratings yet
- 03 Lec Model - Based.designDocument31 pages03 Lec Model - Based.designmujtabaiftikhar156No ratings yet
- Mathematical Modelling of Multirotor UAVDocument6 pagesMathematical Modelling of Multirotor UAVchernet tayeNo ratings yet
- Robust control inverted pendulumDocument7 pagesRobust control inverted pendulumDr Saba TareqNo ratings yet
- Discrete Time Terminal Sliding Mode Control for Linear SystemsDocument5 pagesDiscrete Time Terminal Sliding Mode Control for Linear SystemsWaj DINo ratings yet
- Quantized Feedback Sliding Mode Control of Linear Uncertain SystemsDocument5 pagesQuantized Feedback Sliding Mode Control of Linear Uncertain SystemsWaj DINo ratings yet
- Linear Time-Delay ObserverDocument6 pagesLinear Time-Delay Observerghassen marouaniNo ratings yet
- FYP PresentationDocument81 pagesFYP PresentationTarek Bmr100% (1)
- EnergyDocument15 pagesEnergyKumardeep MukhopadhyayNo ratings yet
- Chapter 8 ControlDocument96 pagesChapter 8 ControlDESHMUKH ANKIT PRAKASHRAONo ratings yet
- Aircraft Mathematical ModelDocument44 pagesAircraft Mathematical Modelkathan Irish RNo ratings yet
- Chapter 3 - Control System ModellingDocument21 pagesChapter 3 - Control System ModellingMustafa ManapNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- 06 Coupled Aeroelastic ModelsDocument11 pages06 Coupled Aeroelastic ModelsRubén NavasNo ratings yet
- Hickman SDocument21 pagesHickman SHoàng GiangNo ratings yet
- Lecture 3 - 2Document42 pagesLecture 3 - 2faruktokuslu16No ratings yet
- MECH 450 Lab Assignment 2...Document15 pagesMECH 450 Lab Assignment 2...fu MozaNo ratings yet
- Class 2 - Mathematical Modeling Using Transfer Function ApproachDocument14 pagesClass 2 - Mathematical Modeling Using Transfer Function Approachapi-26676616No ratings yet
- Adrc Arm ControlDocument12 pagesAdrc Arm ControlSaurabh SinghNo ratings yet
- EEPC102 Module IDocument27 pagesEEPC102 Module IElizabeth GomezNo ratings yet
- Mathematical Modeling TechniquesDocument51 pagesMathematical Modeling TechniquesSeid DeguNo ratings yet
- L4 - Feedback Principle and Linear Systems IIDocument7 pagesL4 - Feedback Principle and Linear Systems IIchandersuresh9800No ratings yet
- Lab 03 Simulink 2018 Part 2Document12 pagesLab 03 Simulink 2018 Part 2Reem GheithNo ratings yet
- Modeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentDocument13 pagesModeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentLittle_skipNo ratings yet
- Linear Control 0Document44 pagesLinear Control 0areeb ahmadNo ratings yet
- D'Alembert-Lagrange!s Principal Equations, Their Origin and ApplicationsDocument45 pagesD'Alembert-Lagrange!s Principal Equations, Their Origin and ApplicationsBagulSurabhiNo ratings yet
- Discrete Model of Hybrid Stepper Motor by Optimal State Space ControlDocument8 pagesDiscrete Model of Hybrid Stepper Motor by Optimal State Space ControlJhon Bairon Velásquez MiraNo ratings yet
- Discrete Event Systems in Dioid Algebra and Conventional AlgebraFrom EverandDiscrete Event Systems in Dioid Algebra and Conventional AlgebraNo ratings yet
- Bnds BDV: Curl 2 (B) Div 0Document1 pageBnds BDV: Curl 2 (B) Div 0Jagat Dada 2.0No ratings yet
- Lecture 3, 4 & 5Document16 pagesLecture 3, 4 & 5Jagat Dada 2.0No ratings yet
- Modeling and Simulation of Mechatronic SystemsDocument15 pagesModeling and Simulation of Mechatronic SystemsJagat Dada 2.0No ratings yet
- 2178Document72 pages2178Jagat Dada 2.0No ratings yet
- MH 504: Modelling and Simulation of Mechatronic SystemsDocument23 pagesMH 504: Modelling and Simulation of Mechatronic SystemsJagat Dada 2.0No ratings yet
- Home Page: Click On Notification Button To Know About Important Dates, Advertisement, Latest Notices EtcDocument31 pagesHome Page: Click On Notification Button To Know About Important Dates, Advertisement, Latest Notices EtcJagat Dada 2.0No ratings yet
- InterpolatorsDocument21 pagesInterpolatorsJagat Dada 2.0No ratings yet
- ME542-Lecture1-2pp End SemDocument24 pagesME542-Lecture1-2pp End SemJagat Dada 2.0No ratings yet
- 2017 (E.s.)Document3 pages2017 (E.s.)Jagat Dada 2.0No ratings yet
- Class-8 Science Chapter-11 6 Pages PDFDocument6 pagesClass-8 Science Chapter-11 6 Pages PDFAyushmanNo ratings yet
- Q1 W1D2 - Quadratic Equation in Standard FormDocument15 pagesQ1 W1D2 - Quadratic Equation in Standard FormMary Joy ManaoisNo ratings yet
- B2 ListDocument3 pagesB2 ListAreli NavaNo ratings yet
- Newtons de Aere Et Aethere and The IntroDocument37 pagesNewtons de Aere Et Aethere and The IntroArchimedes_287No ratings yet
- RT Review - 6Document25 pagesRT Review - 6Hao TranNo ratings yet
- Elc151 - Listening Sample Test - Jun 2020Document5 pagesElc151 - Listening Sample Test - Jun 2020A'eesya Humaira Binti RumawiNo ratings yet
- Ladder PDFDocument47 pagesLadder PDFkumaravel07No ratings yet
- WEEK-4-Q2-GEN CHEM-Nov 20-24-DLLDocument7 pagesWEEK-4-Q2-GEN CHEM-Nov 20-24-DLLJennette Belliot100% (1)
- Indication of Functional Dimension According Iso Gps - How Shall We Applicate?Document6 pagesIndication of Functional Dimension According Iso Gps - How Shall We Applicate?Carlos AranaNo ratings yet
- T F UA T UA Q: Heat Exchanger EffectivenessDocument8 pagesT F UA T UA Q: Heat Exchanger EffectivenessrinthusNo ratings yet
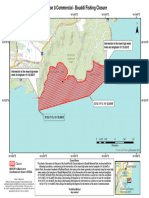
- Bouddi National Park Fishing Exclusion ZoneDocument1 pageBouddi National Park Fishing Exclusion ZonejdhjdhjdhNo ratings yet
- 4 Three-Wire LevelingDocument3 pages4 Three-Wire LevelingBryanHarold BrooNo ratings yet
- Motion in One Dimension ICSE OFFICIALDocument10 pagesMotion in One Dimension ICSE OFFICIALSuviAth MehtaNo ratings yet
- Final Term Assignment for Linear Algebra CourseDocument2 pagesFinal Term Assignment for Linear Algebra CourseMuhammad Ali100% (1)
- An Experimental Investigation of The Effect of Pervious Concrete by Various Shape and Sizes of AggregateDocument10 pagesAn Experimental Investigation of The Effect of Pervious Concrete by Various Shape and Sizes of AggregateIJRASETPublicationsNo ratings yet
- Hob SelectionDocument4 pagesHob SelectionVikas ChauhanNo ratings yet
- Analytic Equations Power Series SolutionsDocument21 pagesAnalytic Equations Power Series SolutionsPop RobertNo ratings yet
- Swing Equation For Generator Rotor Angle StabilityDocument4 pagesSwing Equation For Generator Rotor Angle StabilityEngr Fahimuddin QureshiNo ratings yet
- ME3405 Mechatronics Lab Student Name: Iskander Otorbayev Student Number: 180015732Document12 pagesME3405 Mechatronics Lab Student Name: Iskander Otorbayev Student Number: 180015732Iskander OtorbayevNo ratings yet
- HE ROL Users GuideDocument42 pagesHE ROL Users GuideMiguel RomanNo ratings yet
- Lecture Notes of Engineering MaterialsDocument7 pagesLecture Notes of Engineering Materialsahsan888100% (1)
- PEF University Physics Mcqs on X-Rays, Ultrasound and EM WavesDocument18 pagesPEF University Physics Mcqs on X-Rays, Ultrasound and EM WavesZuhaib AhmedNo ratings yet
- Surface Characterisation and Electrochemical Behaviour of Porous Titanium Dioxide Coated 316L Stainless Steel For Orthopaedic Applications PDFDocument6 pagesSurface Characterisation and Electrochemical Behaviour of Porous Titanium Dioxide Coated 316L Stainless Steel For Orthopaedic Applications PDFRahul MadanNo ratings yet
- The Efficient Niti System: User InformationDocument28 pagesThe Efficient Niti System: User InformationPRDAkNo ratings yet
- St. John Paul II surveying course overviewDocument7 pagesSt. John Paul II surveying course overviewJeffrey SumambotNo ratings yet
- Understanding Philosophy's Academic Meaning & FunctionsDocument6 pagesUnderstanding Philosophy's Academic Meaning & FunctionsJericho whiteNo ratings yet
- Atoms Quiz Game With Answers For Science Educators - Download .PPT atDocument134 pagesAtoms Quiz Game With Answers For Science Educators - Download .PPT atRyan MurphyNo ratings yet
- PE 1000 SuperliningDocument2 pagesPE 1000 SuperliningASHOKNo ratings yet
- ASME MFC - 02M Measurement of Uncertainty in Fluid Flow in Closed ConduitsDocument76 pagesASME MFC - 02M Measurement of Uncertainty in Fluid Flow in Closed ConduitsSallah Omran100% (1)
- Modelling and Simulation of Armature ControlledDocument7 pagesModelling and Simulation of Armature ControlledPrathap VuyyuruNo ratings yet