You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Diodo Emisor de Luz (LED) : Fibra ÓpticaDocument1 pageDiodo Emisor de Luz (LED) : Fibra ÓpticaDario Vasco MeleroNo ratings yet
- Geochemistry FormulaeDocument4 pagesGeochemistry FormulaePrayas DuttaNo ratings yet
- Microwave Resonators NotesDocument31 pagesMicrowave Resonators Notesameya1981No ratings yet
- Dynamics FULL Equation SheetDocument2 pagesDynamics FULL Equation SheetZachNo ratings yet
- Design & Control of Excitation System For Sync Generator: Mid Project PresentationDocument33 pagesDesign & Control of Excitation System For Sync Generator: Mid Project PresentationMuhammad Raheel TariqNo ratings yet
- Final Exam Formula SheetDocument3 pagesFinal Exam Formula Sheetjanaka100% (1)
- 1.dynamics of Relativistic Particles and Electromagnetic FieldsDocument15 pages1.dynamics of Relativistic Particles and Electromagnetic FieldsAyushman BishwasNo ratings yet
- A 4 TH Order 7-Dimensional Polynomial WHDocument11 pagesA 4 TH Order 7-Dimensional Polynomial WHAkshaya Kumar RathNo ratings yet
- Final Formula SheetDocument4 pagesFinal Formula SheetBerkay EkenNo ratings yet
- Reac Ii 2023 CH 4Document37 pagesReac Ii 2023 CH 4hagt813No ratings yet
- Universityof Surrey EnglandDocument5 pagesUniversityof Surrey EnglandPhinah RoseNo ratings yet
- Nuclear Reactor AnalysisDocument30 pagesNuclear Reactor AnalysisSandamali SanchalaNo ratings yet
- Rates of Chemical ReactionDocument48 pagesRates of Chemical ReactionAlexis Justin YapNo ratings yet
- Super Regenerative ReceiversDocument21 pagesSuper Regenerative ReceiversAyoub KamalNo ratings yet
- PMS Theory Chapter2Document42 pagesPMS Theory Chapter2moulitechNo ratings yet
- Q1. The Equivalent Circuit in The Laplace DomainDocument23 pagesQ1. The Equivalent Circuit in The Laplace DomainumarsaboNo ratings yet
- Corriente Eficaz en El Condensador 2: 20Khz A 50KhzDocument1 pageCorriente Eficaz en El Condensador 2: 20Khz A 50KhzdojiligNo ratings yet
- Oxidation of o-XyleneDocument19 pagesOxidation of o-XyleneIvan Sanchez100% (2)
- Cheat - Sheet - Exam 1Document2 pagesCheat - Sheet - Exam 1LoganNo ratings yet
- Chapter 1. Time - Domain Analysis of Electric Circuits PDFDocument42 pagesChapter 1. Time - Domain Analysis of Electric Circuits PDFThùy Dung Nguyễn ThịNo ratings yet
- DC and AC Power Fundamentals SAPDocument51 pagesDC and AC Power Fundamentals SAPPaul Danniel AquinoNo ratings yet
- 09-24-21 Lecture 14 and CEP 13-14Document20 pages09-24-21 Lecture 14 and CEP 13-14Rose ChenNo ratings yet
- Lecture 39-41 Oscillators - SDACDocument15 pagesLecture 39-41 Oscillators - SDACRahul Kumar sahaniNo ratings yet
- Design of Single ReactionsDocument18 pagesDesign of Single ReactionsKartik IyerNo ratings yet
- 42001233 - Trần Văn Phúc - NV6 PDFDocument1 page42001233 - Trần Văn Phúc - NV6 PDFNguyễn Ngọc KhánhNo ratings yet
- Stresses in Eccentric Hollow CylinderDocument21 pagesStresses in Eccentric Hollow CylinderJayNo ratings yet
- Module Iii - Elastic Design of PrestressedDocument28 pagesModule Iii - Elastic Design of PrestressedJonas Fernandez100% (2)
- PHYS2002 Thermal Physics Q&ADocument3 pagesPHYS2002 Thermal Physics Q&ASaraNo ratings yet
- Ideal Gas Equation SheetDocument1 pageIdeal Gas Equation SheetIsaac HanssenNo ratings yet
- Lembar Perhitungan ReagaenDocument8 pagesLembar Perhitungan ReagaenZahra AlifiaNo ratings yet
- Reac Ii 2023 CH 5Document30 pagesReac Ii 2023 CH 5fikadubiruk87No ratings yet
- Physiological monitoring circuit design and analysisDocument11 pagesPhysiological monitoring circuit design and analysisMaissa HassanNo ratings yet
- ( ) : Analytic Inside and Along Closed Contour CDocument4 pages( ) : Analytic Inside and Along Closed Contour CAdnan NajemNo ratings yet
- Second-Order Circuits ExplainedDocument32 pagesSecond-Order Circuits ExplainedBrandon CilNo ratings yet
- Other RLC Resonant Circuits and Bode Plots 2024Document14 pagesOther RLC Resonant Circuits and Bode Plots 2024str0261No ratings yet
- Resonancia Circuitos RLCDocument9 pagesResonancia Circuitos RLCEddyNo ratings yet
- LT3 C2 L2 Handout FinalDocument15 pagesLT3 C2 L2 Handout FinalSabNo ratings yet
- Exponential Fourier SeriesDocument4 pagesExponential Fourier SeriesVincent KiptanuiNo ratings yet
- EL5107 M1-b: Reviu Dasar Sistem KendaliDocument62 pagesEL5107 M1-b: Reviu Dasar Sistem KendaliDyah Ayu AnggreiniNo ratings yet
- Rotary Inverted PendulumDocument2 pagesRotary Inverted PendulumDuvanJahirBetancourtNo ratings yet
- 02 - Chapter 10 Sinusoidal Steady State AnalysisDocument15 pages02 - Chapter 10 Sinusoidal Steady State AnalysisUmar BazafNo ratings yet
- Electric Circuits 1: The Overdamped Parallel RLC CircuitDocument17 pagesElectric Circuits 1: The Overdamped Parallel RLC CircuitIbrahim GhunaimNo ratings yet
- Sistem Kendali Digital - Week 2-1-1Document35 pagesSistem Kendali Digital - Week 2-1-1Dedi BobNo ratings yet
- Formulario1 161024013717 PDFDocument2 pagesFormulario1 161024013717 PDFLuis Alfonso CueNo ratings yet
- 1.05 Atomic StructureDocument41 pages1.05 Atomic StructureRustin PurplemanNo ratings yet
- Control Lec 2 SolvedDocument16 pagesControl Lec 2 SolvedMhabad ZebariNo ratings yet
- To Plot The Step Response of A Fist Order RL CircuitDocument2 pagesTo Plot The Step Response of A Fist Order RL CircuitdaudNo ratings yet
- If t4 PPTX Flujo Fluidos CompresiblesDocument27 pagesIf t4 PPTX Flujo Fluidos CompresiblesHugo de la FuenteNo ratings yet
- Introductory Quantum Mechanics: Why Quantum Theory and the Wave-Particle DualityDocument20 pagesIntroductory Quantum Mechanics: Why Quantum Theory and the Wave-Particle Dualitysourav gangulyNo ratings yet
- Lab 2Document4 pagesLab 2hosaam123No ratings yet
- Rate and Rate ConstantDocument8 pagesRate and Rate ConstantSai Vishnu GainiNo ratings yet
- Engr302 - Lecture 2 - Coulombs - LawDocument23 pagesEngr302 - Lecture 2 - Coulombs - LawHasanNo ratings yet
- Insem 1 - PE - Handbook - 2023Document3 pagesInsem 1 - PE - Handbook - 2023Ananya VNo ratings yet
- Wave Nature of ParticlesDocument8 pagesWave Nature of ParticlesLinNo ratings yet
- Process Types: Classifying Thermodynamic EventsDocument2 pagesProcess Types: Classifying Thermodynamic EventsSTUDY BEASTNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101From EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101No ratings yet
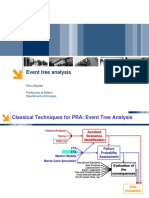
- 2023 Lecture 15 ETDocument17 pages2023 Lecture 15 ETGuy FawkesNo ratings yet
- 1Document109 pages1Guy FawkesNo ratings yet
- Lesson 34Document4 pagesLesson 34Guy FawkesNo ratings yet
- Lesson 35Document25 pagesLesson 35Guy FawkesNo ratings yet
- Final Results 19 05 2023Document1 pageFinal Results 19 05 2023Guy FawkesNo ratings yet
- Lab 5Document8 pagesLab 5Guy FawkesNo ratings yet
- Tees Valley 2 Commissioning Plan Rev0Document22 pagesTees Valley 2 Commissioning Plan Rev0NabilBouabanaNo ratings yet
- Biomass Energy: 2 May 2015 Al Jumlat Ahmed Dept of EEE, CER, UIUDocument28 pagesBiomass Energy: 2 May 2015 Al Jumlat Ahmed Dept of EEE, CER, UIUMontosh RoyNo ratings yet
- LKPD Proposal Pameran WorksheetDocument5 pagesLKPD Proposal Pameran Worksheetmaulana faqihNo ratings yet
- c60 Cryogenic Gas Processing System (Exterran)Document4 pagesc60 Cryogenic Gas Processing System (Exterran)Martín Diego MastandreaNo ratings yet
- Rooppur Nuclear Power PlantDocument5 pagesRooppur Nuclear Power PlantMurgi kun :3No ratings yet
- DURI-GENTF14GN000-MEC-LST-PHR-2003-00 Rev 0A AFU Equipment List (For Issue)Document10 pagesDURI-GENTF14GN000-MEC-LST-PHR-2003-00 Rev 0A AFU Equipment List (For Issue)Budi KamilNo ratings yet
- FG7 RPTCC7 Annex3.4 Myanmar PresentationDocument27 pagesFG7 RPTCC7 Annex3.4 Myanmar PresentationarakanoilwatchNo ratings yet
- Pyro System - Control Loops V0.0Document2 pagesPyro System - Control Loops V0.0Junaid MazharNo ratings yet
- Hydraulic Cylinder Unit (Jan2015)Document29 pagesHydraulic Cylinder Unit (Jan2015)A.i. StergianosNo ratings yet
- Midea  Product  Lineup Air  ConditionerDocument105 pagesMidea  Product  Lineup Air  Conditionerkian galisimNo ratings yet
- Dash8 MTM Vol 4 PDFDocument446 pagesDash8 MTM Vol 4 PDFShawn el'Diablo100% (1)
- Wartsilla 18V220SGDocument9 pagesWartsilla 18V220SGZohaib AlamNo ratings yet
- Abccomp Corporate Brochure EnglishDocument12 pagesAbccomp Corporate Brochure EnglishnghiaNo ratings yet
- Report of An Industrial Visit To Reliance Thermal Power Plant, DahanuDocument8 pagesReport of An Industrial Visit To Reliance Thermal Power Plant, DahanuAmeya VirkudNo ratings yet
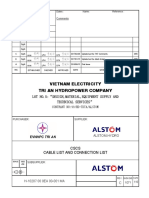
- H-10207 00 0ea 00-001F Ma - CSCS Cable List & Connection Diagram - CDocument110 pagesH-10207 00 0ea 00-001F Ma - CSCS Cable List & Connection Diagram - Cnguyen rinNo ratings yet
- Flexible hybrid power plants for the energy transitionDocument10 pagesFlexible hybrid power plants for the energy transitionWilliam PalozzoNo ratings yet
- Rheem Classic RrnaDocument44 pagesRheem Classic RrnaRedmanJackieNo ratings yet
- Project NTPCDocument43 pagesProject NTPCShubham CronosNo ratings yet
- Thermal Power PlantsDocument24 pagesThermal Power Plantslakshmigsr6610100% (1)
- F Burner Instruction Manual: ModelDocument44 pagesF Burner Instruction Manual: ModelTurgay PolatNo ratings yet
- 600Mw Coal-Fired Power Plant Simulation Model PWRSTND User Help ManualDocument209 pages600Mw Coal-Fired Power Plant Simulation Model PWRSTND User Help ManualBharath KumarNo ratings yet
- Gemini 38AU / 40RU Split System Air Conditioners and Heat PumpsDocument2 pagesGemini 38AU / 40RU Split System Air Conditioners and Heat PumpsINV VENEZUELANo ratings yet
- Performance Correction Chart of Centrifugal Oil Pump For Handling Viscous LiquidsDocument7 pagesPerformance Correction Chart of Centrifugal Oil Pump For Handling Viscous LiquidsalikajbafNo ratings yet
- Controlling Ejector Performance with Steam Bleed ControlDocument9 pagesControlling Ejector Performance with Steam Bleed ControlCan YıldırımNo ratings yet
- 24 Electrical PowerDocument6 pages24 Electrical PowerAhmed Abdoul ZaherNo ratings yet
- #Water PumpsDocument104 pages#Water PumpsfelipeNo ratings yet
- Efficient CombustionDocument1 pageEfficient CombustionDilhara PinnaduwageNo ratings yet
- Mechanical Vapor RecompressionDocument9 pagesMechanical Vapor Recompressionnarayana reddy0% (1)
- The Reference in Surface Treatment EDP-10 ManualDocument4 pagesThe Reference in Surface Treatment EDP-10 ManualYoutube For EducationNo ratings yet
- Valves Q.S For Fire Pump Room - Eng Ahmed HassanDocument1 pageValves Q.S For Fire Pump Room - Eng Ahmed Hassanmujassam noorNo ratings yet