You might also like
- Probabilistic Robotics: Bayes Filter ImplementationsDocument61 pagesProbabilistic Robotics: Bayes Filter Implementationsnis13moNo ratings yet
- Lecture 7 - Steady State ErrorDocument15 pagesLecture 7 - Steady State ErrorAfiq AzharNo ratings yet
- Non-Seasonal Box-Jenkins ModelsDocument50 pagesNon-Seasonal Box-Jenkins ModelsCarl AlbNo ratings yet
- Seminar 10 - Sol PDFDocument4 pagesSeminar 10 - Sol PDFRaya Najiba TroyeeNo ratings yet
- Chapter 10-Frequency ResponseDocument67 pagesChapter 10-Frequency Responseعمر الفهدNo ratings yet
- Chapter 7 - Bode Plot and Gain Compensation (Part 1)Document19 pagesChapter 7 - Bode Plot and Gain Compensation (Part 1)Thanes WaranNo ratings yet
- Lect13 PDFDocument9 pagesLect13 PDFSHAIK MUSTHAFANo ratings yet
- The DC Power Flow EquationsDocument25 pagesThe DC Power Flow EquationsDaryAntoNo ratings yet
- Frequency Domain Analysis Using Bode Plot: Swagat Kumar July 11, 2005Document57 pagesFrequency Domain Analysis Using Bode Plot: Swagat Kumar July 11, 2005ishann123No ratings yet
- BE Physics-Solution PDFDocument235 pagesBE Physics-Solution PDFRajeev PaudelNo ratings yet
- Page1 2Document2 pagesPage1 2Abdul RaufNo ratings yet
- Online Control Lecture - 8.pdfDocument13 pagesOnline Control Lecture - 8.pdfAmylia NatashaNo ratings yet
- Dynamic Behavior of Ideal SystemsDocument31 pagesDynamic Behavior of Ideal SystemsRabya SanaNo ratings yet
- 2011 RF OscillatorDocument27 pages2011 RF OscillatordjordjesivcevNo ratings yet
- A. When O/p Is Across Capacitor: Type of ResponseDocument8 pagesA. When O/p Is Across Capacitor: Type of ResponseAhmed BilalNo ratings yet
- Linear Quadratic (LQG) ControlDocument18 pagesLinear Quadratic (LQG) ControlbalkyderNo ratings yet
- ECE530 Fall2015 Lect4Document42 pagesECE530 Fall2015 Lect4robertovm2002No ratings yet
- Partial Autocorrelations: Timotheus Darikwa SSTA031: Time Series AnalysisDocument26 pagesPartial Autocorrelations: Timotheus Darikwa SSTA031: Time Series AnalysisMaggie Kalembo100% (1)
- Load Flow 2Document23 pagesLoad Flow 2Fawzi RadwanNo ratings yet
- NR Application To Power FlowDocument23 pagesNR Application To Power FlowFawzi RadwanNo ratings yet
- ES386 Slides 06 N DOF LectureDocument28 pagesES386 Slides 06 N DOF Lecturejimawsd569No ratings yet
- Eca 2 Lab ReportDocument10 pagesEca 2 Lab ReportMuhammad SohaibNo ratings yet
- Program Studi Teknik Elektro Universitas UdayanaDocument26 pagesProgram Studi Teknik Elektro Universitas UdayanaWidi ArjanaNo ratings yet
- محاضرة رقم 38Document2 pagesمحاضرة رقم 38Ghazy alshyalNo ratings yet
- EEC 140B: MOSFTE: Modern DevicesDocument18 pagesEEC 140B: MOSFTE: Modern DevicesGerardo SanchezNo ratings yet
- Sistem Kendali Digital - Week 2-1-1Document35 pagesSistem Kendali Digital - Week 2-1-1Dedi BobNo ratings yet
- Lab 5Document8 pagesLab 5Smshihab ShararNo ratings yet
- Nuclear ChemistryDocument32 pagesNuclear ChemistryJingWeybzNo ratings yet
- Ifv (T) V Sin (T) A Sin, Derive The Expressions For A andDocument12 pagesIfv (T) V Sin (T) A Sin, Derive The Expressions For A andWESTLY JUCONo ratings yet
- DB CalculationsDocument6 pagesDB CalculationsJenny ArutaNo ratings yet
- EquipartDocument1 pageEquipartSachin ShekhawatNo ratings yet
- Equipart PDFDocument1 pageEquipart PDFJack AndrewNo ratings yet
- Lecture3 2023 AnnotatedDocument28 pagesLecture3 2023 AnnotatedproddutkumarbiswasNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument76 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu Singh0% (1)
- Pole-Placement by State-Space MethodsDocument36 pagesPole-Placement by State-Space MethodsbalkyderNo ratings yet
- AE Clase 67Document81 pagesAE Clase 67Daniel StiepovichNo ratings yet
- Control L2aDocument17 pagesControl L2avibhore mendirattaNo ratings yet
- Aic Lec 08 Freq1 v01Document46 pagesAic Lec 08 Freq1 v01Mustafa NasserNo ratings yet
- IBM Research Report: An Approximate Fourier Transform Useful in Quan-Tum FactoringDocument9 pagesIBM Research Report: An Approximate Fourier Transform Useful in Quan-Tum FactoringFariz AwiNo ratings yet
- 2049 Ch31a PDFDocument16 pages2049 Ch31a PDFGIngaaNo ratings yet
- Final Exam Formula SheetDocument3 pagesFinal Exam Formula Sheetjanaka100% (1)
- Nyquist I Bode ZadaciDocument29 pagesNyquist I Bode ZadaciNikola HardiNo ratings yet
- Cre Gate QuestionsDocument31 pagesCre Gate QuestionsSandeep CharanNo ratings yet
- Unit Iii Frequency ResponseDocument28 pagesUnit Iii Frequency ResponseRaghu RamNo ratings yet
- Lecture5 InverterchainDocument42 pagesLecture5 Inverterchain조동올No ratings yet
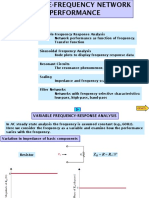
- Ch12 VariableFrequencyResponseAnalysis8EdDocument105 pagesCh12 VariableFrequencyResponseAnalysis8EdThinh Nguyen TanNo ratings yet
- Econometrics Eviews 8Document19 pagesEconometrics Eviews 8Farid SchikhamiroffNo ratings yet
- Exp 7.absorberDocument17 pagesExp 7.absorberمصطفى سعيد سعد برغوث 201810526No ratings yet
- Lecture 15 - Energy Bands For Electrons - ContinuedDocument6 pagesLecture 15 - Energy Bands For Electrons - Continuedمريم صباNo ratings yet
- Chapter 6 SRDocument137 pagesChapter 6 SRMadhusmita BarikNo ratings yet
- Beat Phenomenon - Vibration - Sys. Analys.Document5 pagesBeat Phenomenon - Vibration - Sys. Analys.Miguel CervantesNo ratings yet
- Module 2 - Mechanical Stability Models PDFDocument36 pagesModule 2 - Mechanical Stability Models PDFJoana Marie PercianoNo ratings yet
- NR Application To Power FlowDocument17 pagesNR Application To Power FlowSrinivas YelisettiNo ratings yet
- Control - System - Chapter 6 - 8EDocument51 pagesControl - System - Chapter 6 - 8EE24089046林雯琪No ratings yet
- CAPE2024 Assignment2Document2 pagesCAPE2024 Assignment2Vedant SharmaNo ratings yet
- Dynamic Analysis of Manipulators: Newtonian Approach: Berke GürDocument30 pagesDynamic Analysis of Manipulators: Newtonian Approach: Berke GürOmar Seraj Ed-DeenNo ratings yet
- EE3101 Communication Engineering: Chapter 3-1, SynchronizationDocument16 pagesEE3101 Communication Engineering: Chapter 3-1, SynchronizationfishkantNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- DAC AnalysisDocument19 pagesDAC Analysisమురళీధర్ ఆది ఆంధ్రుడుNo ratings yet
- MP65557-1 Manual Técnico - 4900Document371 pagesMP65557-1 Manual Técnico - 4900Tecnico IncoderNo ratings yet
- Missouri Department of Transportation: Standard Inspection and Testing Plan (ITP)Document32 pagesMissouri Department of Transportation: Standard Inspection and Testing Plan (ITP)mohamedamine.zemouriNo ratings yet
- Modul MarketingDocument5 pagesModul MarketingDeni IrvandaNo ratings yet
- Cloud Computing 101 TutorialDocument203 pagesCloud Computing 101 TutorialYunis Iklil100% (1)
- Detector Demetales Manuel 103Document6 pagesDetector Demetales Manuel 103wilfredoNo ratings yet
- Pilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolDocument10 pagesPilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolCher GeriNo ratings yet
- Present Simple Present ContinuousDocument3 pagesPresent Simple Present ContinuousFernando SabinoNo ratings yet
- The Child and Adolescent Learners and Learning PrinciplesDocument8 pagesThe Child and Adolescent Learners and Learning PrinciplesAragon KhailNo ratings yet
- ( (2004) Yamamuro & Wood) - Effect of Depositional Method On The Undrained Behavior and Microstructure of Sand With SiltDocument10 pages( (2004) Yamamuro & Wood) - Effect of Depositional Method On The Undrained Behavior and Microstructure of Sand With SiltLAM TRAN DONG KIEMNo ratings yet
- Fujikura FSM40S Service Manual PDFDocument67 pagesFujikura FSM40S Service Manual PDFAndrey Nikollas BuckoNo ratings yet
- 48 Sociology: B.A./B.Sc.: Elective and OptionalDocument4 pages48 Sociology: B.A./B.Sc.: Elective and OptionalMNo ratings yet
- Slot 22-23-24 Real Time CommunicationDocument50 pagesSlot 22-23-24 Real Time CommunicationLinh BuiNo ratings yet
- Fragility Curves For Mixed Concrete-Steel Frames Subjected To SeismicDocument5 pagesFragility Curves For Mixed Concrete-Steel Frames Subjected To SeismicJulián PovedaNo ratings yet
- Minimum Leak Path For TTJDocument3 pagesMinimum Leak Path For TTJparikshitpadture100% (2)
- Bc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreDocument60 pagesBc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreSimonaMauna33% (3)
- Engineers House Fire Fighting Course FP 01Document54 pagesEngineers House Fire Fighting Course FP 01Muhammad ElbarbaryNo ratings yet
- WEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEDocument6 pagesWEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEMuhd Alif MikhailNo ratings yet
- 3393 - Supervision of Concrete Construction Volume 2Document271 pages3393 - Supervision of Concrete Construction Volume 2Oum ChhayNoy100% (11)
- Ai R16 - Unit-6Document36 pagesAi R16 - Unit-6RakeshNo ratings yet
- Saudi Arabia Companies Contact DetailsDocument64 pagesSaudi Arabia Companies Contact DetailsYAGHMOURE ABDALRAHMAN86% (69)
- Komatsu Wheel Loaders Wa250pz 5 Shop ManualDocument20 pagesKomatsu Wheel Loaders Wa250pz 5 Shop Manualmarcia100% (48)
- P16mba7 1Document4 pagesP16mba7 1Vishalatchi MNo ratings yet
- Stylus - Pro - 4400 201 300 (067 100)Document34 pagesStylus - Pro - 4400 201 300 (067 100)Joso CepuranNo ratings yet
- Winter Student Enrichment PacketDocument9 pagesWinter Student Enrichment PacketshelleyallynNo ratings yet
- Understanding Terrorism and Political Violence PDFDocument304 pagesUnderstanding Terrorism and Political Violence PDFmihaela buzatuNo ratings yet
- FWD Week 47 Learning Material For Alaric YeoDocument7 pagesFWD Week 47 Learning Material For Alaric YeoarielNo ratings yet
- Huawei FusionServer RH2288 V3 Data Sheet PDFDocument2 pagesHuawei FusionServer RH2288 V3 Data Sheet PDFMartenMattisenNo ratings yet
- Daikin LXE10E-A - Service Manual (TR 01-09B) PDFDocument238 pagesDaikin LXE10E-A - Service Manual (TR 01-09B) PDFmail4ksnNo ratings yet