You might also like
- Hien Tuong Khi Dong Tren Canh May BayDocument35 pagesHien Tuong Khi Dong Tren Canh May BayTrần TàiNo ratings yet
- Lession ODE PDE Chapter9 Sort CreditDocument63 pagesLession ODE PDE Chapter9 Sort CreditHiếu Nguyễn TrungNo ratings yet
- De Cuong K12-Tap 1.2 HK1 NCTDocument69 pagesDe Cuong K12-Tap 1.2 HK1 NCTD DungNo ratings yet
- CH 1Document35 pagesCH 1Tiến TạNo ratings yet
- Bai Tap Chuong 3 - Dieu Khien MoDocument10 pagesBai Tap Chuong 3 - Dieu Khien MoTri thức trong tầm tayNo ratings yet
- Chương 3 Dong Hoc Chat LuuDocument42 pagesChương 3 Dong Hoc Chat Luumb080204No ratings yet
- Chuyên Đề Dạy Thêm Vật Lý 11 - Năm Học 2023-2024 Lí Thuyết & Bài Tập Phân Theo Logic Bám Sát Chương Trình Gdpt Mới (Đang Cập Nhật) (Bản Hs-gv)Document33 pagesChuyên Đề Dạy Thêm Vật Lý 11 - Năm Học 2023-2024 Lí Thuyết & Bài Tập Phân Theo Logic Bám Sát Chương Trình Gdpt Mới (Đang Cập Nhật) (Bản Hs-gv)Dạy Kèm Quy Nhơn Official100% (1)
- BÀI 1. KHÁI NIỆM DAO ĐỘNG ĐIỀU HOÀ - HSDocument6 pagesBÀI 1. KHÁI NIỆM DAO ĐỘNG ĐIỀU HOÀ - HSnatuan111222333No ratings yet
- Chinh Phục Bài Tập Dao Động CơDocument36 pagesChinh Phục Bài Tập Dao Động Cơ23010607No ratings yet
- Tài Liệu Điều Khiển LogicDocument51 pagesTài Liệu Điều Khiển Logichuy nguyễnNo ratings yet
- Mô hình hóa các hệ thống vật lýDocument23 pagesMô hình hóa các hệ thống vật lýhoang btNo ratings yet
- Bai 7 Song Co Va Su Truyen Song CoDocument43 pagesBai 7 Song Co Va Su Truyen Song Coleducthienhvt_475228No ratings yet
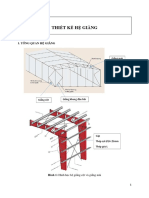
- 1.2 - Thiết kế hệ giằngDocument6 pages1.2 - Thiết kế hệ giằngHuy Truong Nguyen GiaNo ratings yet
- 8- DAO ĐỘNG TẮT DẦN-CƯỠNG BỨCDocument7 pages8- DAO ĐỘNG TẮT DẦN-CƯỠNG BỨCThanh Minh LêNo ratings yet
- CHƯƠNG 8. CHUYỂN VỊ CỦA DẦM CHỊU UỐNDocument17 pagesCHƯƠNG 8. CHUYỂN VỊ CỦA DẦM CHỊU UỐNhovantai080697No ratings yet
- Tailieuxanh 8 Chinh Kythuatdieukhien Dientu 6575Document9 pagesTailieuxanh 8 Chinh Kythuatdieukhien Dientu 6575Cường Nguyễn MạnhNo ratings yet
- Li 12 - Noi Dung On Tap KT Cuoi Ki I 2022 2023Document18 pagesLi 12 - Noi Dung On Tap KT Cuoi Ki I 2022 2023Nguỹn EnhNo ratings yet
- Mach Dien C2-DPF-Mach Xac Lap Dieu HoaDocument90 pagesMach Dien C2-DPF-Mach Xac Lap Dieu Hoatrantritam170720No ratings yet
- BF3534 Đo lường và ĐK nhiệt độ lưu thểDocument10 pagesBF3534 Đo lường và ĐK nhiệt độ lưu thểchineu2802No ratings yet
- Chuong 5-P1 - Bo Nghich Luu ApDocument16 pagesChuong 5-P1 - Bo Nghich Luu ApLê ĐạtNo ratings yet
- Ly 12 On Luyen Chuong IIDocument19 pagesLy 12 On Luyen Chuong IIhinhcongNo ratings yet
- 02-2023 Đề Cương Ôn Tập Môn Vật LíDocument19 pages02-2023 Đề Cương Ôn Tập Môn Vật LíVu Xuan Tien (FPL CT)No ratings yet
- VẬT LÝ 2 .2THỰC HÀNHDocument5 pagesVẬT LÝ 2 .2THỰC HÀNHHân vũNo ratings yet
- BT CHD-03Document23 pagesBT CHD-03dangphunguyen2102No ratings yet
- Bài 1 - Lý IDocument36 pagesBài 1 - Lý IĐăng DươngNo ratings yet
- Dao Dong Ky Thuat - 1718 - 0Document72 pagesDao Dong Ky Thuat - 1718 - 0Nguyễn Quý TấnNo ratings yet
- Ly Thuyet Mach Chuong 2Document42 pagesLy Thuyet Mach Chuong 2Anh NguyenNo ratings yet
- Tinh Toan Thiet Ke Thiet Bi Dien Tu Cong Suat Tran Van Thinh p2 8737Document125 pagesTinh Toan Thiet Ke Thiet Bi Dien Tu Cong Suat Tran Van Thinh p2 8737Ha Ngo HuyNo ratings yet
- I Cuong Dao Dong Hs Phong Chu 12.thuvienvatly - Com.f92c0.46763Document30 pagesI Cuong Dao Dong Hs Phong Chu 12.thuvienvatly - Com.f92c0.46763Anh NguyễnNo ratings yet
- Tuyển Tập Đồ Thị Sóng Cơ - Sóng Dừng - Thầy VNADocument14 pagesTuyển Tập Đồ Thị Sóng Cơ - Sóng Dừng - Thầy VNAPhac NguyenNo ratings yet
- Phuc Chat 2 5312Document195 pagesPhuc Chat 2 5312Trung ThiệnNo ratings yet
- PiezoelectricityDocument3 pagesPiezoelectricityQuang Chính PhạmNo ratings yet
- Chuong 1 - Dao Dong CoDocument13 pagesChuong 1 - Dao Dong Codat quocNo ratings yet
- CASD 2017. ĐIỀU KHIỂN CHỐNG RUNG CHO CẦU TRỤC THÁPDocument7 pagesCASD 2017. ĐIỀU KHIỂN CHỐNG RUNG CHO CẦU TRỤC THÁPNam Hoang ThanhNo ratings yet
- Chuyen de Do Thi Trong Dao Dong Dieu Hoa Va Tong Hop Dao Dong Dieu HoaDocument12 pagesChuyen de Do Thi Trong Dao Dong Dieu Hoa Va Tong Hop Dao Dong Dieu HoaRÔn RÔnNo ratings yet
- TH y L C Công TrìnhDocument12 pagesTH y L C Công Trìnhleduat100% (1)
- Nguyen Dinh TungDocument21 pagesNguyen Dinh Tungnam NguyễnNo ratings yet
- Ky Thuat Dien - Chuong 2Document19 pagesKy Thuat Dien - Chuong 2Nguyễn TrungNo ratings yet
- File - 20211024 - 204819 - Dao Đ NG Cư NG B C T NG H P Dao Đ NG - 2Document10 pagesFile - 20211024 - 204819 - Dao Đ NG Cư NG B C T NG H P Dao Đ NG - 2Tuấn Nam ĐoànNo ratings yet
- 6. Giáo trình kỹ thuật điện chương 2Document21 pages6. Giáo trình kỹ thuật điện chương 2Tịnh TrầnNo ratings yet
- Tiêu Năng Theo Hình TH C Phun XaDocument19 pagesTiêu Năng Theo Hình TH C Phun Xalekhang22011997No ratings yet
- LTDH 2019 5 Sóng CơDocument8 pagesLTDH 2019 5 Sóng Cơ10CL1-22- Cao Hà Yến NhiNo ratings yet
- ts247 DT Tong Hop Kien Thuc Chuong Dao Dong Co 377 1638526752Document10 pagests247 DT Tong Hop Kien Thuc Chuong Dao Dong Co 377 1638526752Chi NgoNo ratings yet
- Vat Li 12Document38 pagesVat Li 12c9nn6s6r7jNo ratings yet
- Donghoc (Compatibility Mode)Document42 pagesDonghoc (Compatibility Mode)lNo ratings yet
- Tóm Tắt Lý Thuyết Môn Vật Lý Lớp 12Document22 pagesTóm Tắt Lý Thuyết Môn Vật Lý Lớp 1241Như ÝNo ratings yet
- On Tap SBVLDocument34 pagesOn Tap SBVLThắng PhạmNo ratings yet
- Do Thi Dao Dong CoDocument12 pagesDo Thi Dao Dong Cophamanhkhoa01012009No ratings yet
- Công TH CDocument4 pagesCông TH Cnvtrung193No ratings yet
- Thêm cả năm vật lí 12Document134 pagesThêm cả năm vật lí 12Le Quoc DuyNo ratings yet
- De-Tinh-22 8 2021Document4 pagesDe-Tinh-22 8 2021Hoàng ViệtNo ratings yet
- #2 - Dao Đ NGDocument16 pages#2 - Dao Đ NGAnh BùiNo ratings yet
- CHUYEN DE SONG CO Doan Van LuongDocument126 pagesCHUYEN DE SONG CO Doan Van LuongBich Thuy100% (1)
- EE6283 - Chuong 2 - Pho Cua Tin Hieu Bien ThienDocument8 pagesEE6283 - Chuong 2 - Pho Cua Tin Hieu Bien ThienNguyễn Minh ĐứcNo ratings yet
- CHƯƠNG 2. LÝ THUYẾT NỘI LỰCDocument22 pagesCHƯƠNG 2. LÝ THUYẾT NỘI LỰChovantai080697No ratings yet
- (2) Bài Giảng Dao Động Kỹ ThuậtDocument31 pages(2) Bài Giảng Dao Động Kỹ ThuậtQuang MỹNo ratings yet
- C3 CLC VTTGiang BkelDocument11 pagesC3 CLC VTTGiang BkelPhương Liên Hoàng NamNo ratings yet
- Cơ sở lý thuyếtDocument11 pagesCơ sở lý thuyếtHOÀNG VƯƠNG NHẬTNo ratings yet
- Chuong 2 - Tai Trong Tac Dung Len Cong Trinh Ngoai KhoiDocument41 pagesChuong 2 - Tai Trong Tac Dung Len Cong Trinh Ngoai Khoitruebeauty Vn'sNo ratings yet