You might also like
- Cisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3From EverandCisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3No ratings yet
- Offshore Electrical Engineering ManualFrom EverandOffshore Electrical Engineering ManualRating: 4 out of 5 stars4/5 (9)
- Power On Sequence IntroductionDocument8 pagesPower On Sequence Introductionmimelendeza100% (1)
- Staad - LC GeneratorDocument35 pagesStaad - LC GeneratorRizky TantyoNo ratings yet
- Ericsson Radio Node Retu Troubleshooting GuideDocument10 pagesEricsson Radio Node Retu Troubleshooting Guiderifki nurazmi100% (4)
- X6 ManualDocument1 pageX6 ManualRizky Tantyo100% (1)
- ECDIS Model Course 1 27 2012 EditionDocument249 pagesECDIS Model Course 1 27 2012 EditionМИЛЕН ДОЛАПЧИЕВ100% (3)
- Kenya Urban Roads Authority: Office of The Regional Manager - CoastDocument19 pagesKenya Urban Roads Authority: Office of The Regional Manager - Coastzewo13No ratings yet
- Betafpv hx115 FixedDocument4 pagesBetafpv hx115 FixedPradeep RaajNo ratings yet
- BTFL Cli Phoenix 20220713 184952Document4 pagesBTFL Cli Phoenix 20220713 184952Pradeep RaajNo ratings yet
- DiffDocument4 pagesDiffWernerNo ratings yet
- BTFL - Cli - Backup - Nazgul - Evoque F5D 2023 - 06 - 26 16 - 03 - 27Document4 pagesBTFL - Cli - Backup - Nazgul - Evoque F5D 2023 - 06 - 26 16 - 03 - 27maximilianmartin87No ratings yet
- Betfpvhx 115Document4 pagesBetfpvhx 115Pradeep RaajNo ratings yet
- BTFL Cli Backup Mobula6 ELRS 20230628 185520Document3 pagesBTFL Cli Backup Mobula6 ELRS 20230628 185520WilcoNo ratings yet
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230910 - 161732Document5 pages(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230910 - 161732Dan MultiNo ratings yet
- Apex Frame Voor JimmyDocument3 pagesApex Frame Voor JimmyJoep van der MeijdenNo ratings yet
- XL5 30-11-2021Document3 pagesXL5 30-11-2021LepoulpeNo ratings yet
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - Lumenier - 20230917 - 004634Document6 pages(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - Lumenier - 20230917 - 004634Dan MultiNo ratings yet
- BTFL Cli Mobula6 ELRS 20230628 184302Document3 pagesBTFL Cli Mobula6 ELRS 20230628 184302WilcoNo ratings yet
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230916 - 172123Document6 pages(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230916 - 172123Dan MultiNo ratings yet
- BTFL Cli Backup 20220514 155409Document3 pagesBTFL Cli Backup 20220514 155409Achmad DutaNo ratings yet
- BTFL Cli Backup Mobula6 ELRS 20230705 165406Document4 pagesBTFL Cli Backup Mobula6 ELRS 20230705 165406WilcoNo ratings yet
- BTFL Cli Protek 35 20210307 202914Document3 pagesBTFL Cli Protek 35 20210307 202914Luciano Perez CaminosNo ratings yet
- BTFL Cli Backup Mobula6 ELRS 20230704 082151Document4 pagesBTFL Cli Backup Mobula6 ELRS 20230704 082151WilcoNo ratings yet
- Flight Controller ParjoDocument3 pagesFlight Controller ParjoRizky TantyoNo ratings yet
- Apexdiffo 3Document2 pagesApexdiffo 3JGM Jaguś Goods MakerNo ratings yet
- BTFL Cli Backup Jonasfpv 20221003 204911Document2 pagesBTFL Cli Backup Jonasfpv 20221003 204911Jonas Pinheiro de LimaNo ratings yet
- BTFL Cli Mobula7 HD 20191016 183740Document3 pagesBTFL Cli Mobula7 HD 20191016 183740Luminix RunningtextNo ratings yet
- Tmotor ft5 Tune Back UpDocument2 pagesTmotor ft5 Tune Back UpJoep van der MeijdenNo ratings yet
- Betaflight HendraDocument3 pagesBetaflight HendraRizky TantyoNo ratings yet
- Betafpv 95xv3Document3 pagesBetafpv 95xv3Joep van der MeijdenNo ratings yet
- BTFL - Cli - Diatone - 20190501 - 210153 540 TYRANTDocument3 pagesBTFL - Cli - Diatone - 20190501 - 210153 540 TYRANThacklifeaiNo ratings yet
- BTFL Cli 20210227 105932Document2 pagesBTFL Cli 20210227 105932Joep van der MeijdenNo ratings yet
- Apex Dumpo3Document22 pagesApex Dumpo3JGM Jaguś Goods MakerNo ratings yet
- Asus Eee PC 701Document47 pagesAsus Eee PC 701Rosangela MariaNo ratings yet
- File CLI Naze 32Document114 pagesFile CLI Naze 32Muhammad Mohd DinNo ratings yet
- Terminal Content 1686279044780Document3 pagesTerminal Content 1686279044780jhon henrri garcera garcesNo ratings yet
- Auto FantásticoDocument3 pagesAuto FantásticoVictor DomínguezNo ratings yet
- CIV LogFileDocument125 pagesCIV LogFileיוסף קNo ratings yet
- Nvram Ap6255Document2 pagesNvram Ap6255haget36081No ratings yet
- Acer Aspire 6530 ZK3Document43 pagesAcer Aspire 6530 ZK3Jose A LachiondoNo ratings yet
- E7 Printer CFGDocument5 pagesE7 Printer CFGDavid FilipeNo ratings yet
- Zadaci Sa Vjezbi AMIRADocument43 pagesZadaci Sa Vjezbi AMIRAsandraNo ratings yet
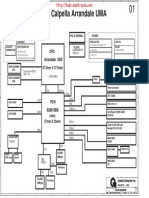
- Fujitsu Siemens Lifebook Ah530 Quanta Fh2 Intel Calpella Arrandale Uma Rev 1a SCHDocument34 pagesFujitsu Siemens Lifebook Ah530 Quanta Fh2 Intel Calpella Arrandale Uma Rev 1a SCHdutu590No ratings yet
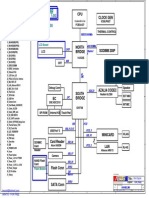
- Asus EeePC 1000HE Schematic DiagramsDocument48 pagesAsus EeePC 1000HE Schematic DiagramsMicu Adrian DanutNo ratings yet
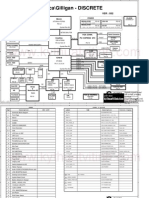
- Dell Inspiron 1520 1720 Quanta Fm5 Corsica Gilligan Discrete Rev x02 SCHDocument51 pagesDell Inspiron 1520 1720 Quanta Fm5 Corsica Gilligan Discrete Rev x02 SCHJtzabalaNo ratings yet
- E:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hDocument7 pagesE:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hVinícius Lopes Sampaio100% (1)
- Acer TravelMate 8572 8572Z Quanta ZR9 Rev1ADocument47 pagesAcer TravelMate 8572 8572Z Quanta ZR9 Rev1AContreras CarlosNo ratings yet
- Colegio de San Juan de Letran - Calamba: Bo. Bucal Calamba City, LagunaDocument8 pagesColegio de San Juan de Letran - Calamba: Bo. Bucal Calamba City, LagunaELLAINE DE CLARONo ratings yet
- Solicitud DocumentosDocument5 pagesSolicitud DocumentosSantiago GuarinNo ratings yet
- CIV LogFileDocument2 pagesCIV LogFilejason quispeNo ratings yet
- Robin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidDocument7 pagesRobin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidMarc AlamoNo ratings yet
- APN Problem TroubleshootingDocument6 pagesAPN Problem TroubleshootingAh M EdNo ratings yet
- 03-10-2022 TN - Swap - SRTNR1 Pre LogDocument12 pages03-10-2022 TN - Swap - SRTNR1 Pre Logyou are awesomeNo ratings yet
- Printer CFGDocument17 pagesPrinter CFGFiras Al-KanaaniNo ratings yet
- UntitledDocument5 pagesUntitledCarlos JúniorNo ratings yet
- De2 - 115 User ManualDocument27 pagesDe2 - 115 User ManualKenan Emre Üstündağ100% (1)
- LogDocument955 pagesLogIza ServiceNo ratings yet
- GlitchDocument1,780 pagesGlitchMohd MoinuddinNo ratings yet
- UntitledDocument3 pagesUntitledkappaNo ratings yet
- CDMA Signaling and Data ServicesDocument90 pagesCDMA Signaling and Data ServicesMohammed GhalebNo ratings yet
- دوك imu تءارق للاخ نم هنم دكاتلاو ليدعتلا لازم يبي لدعم scoopDocument33 pagesدوك imu تءارق للاخ نم هنم دكاتلاو ليدعتلا لازم يبي لدعم scoopDemon KrNo ratings yet
- Load CombinationDocument2 pagesLoad CombinationRizky TantyoNo ratings yet
- Possessed-Blade: Set 6000 (Hasan) 29 AprilDocument2 pagesPossessed-Blade: Set 6000 (Hasan) 29 AprilRizky TantyoNo ratings yet
- Crest Audio LA-901 Schematic PDFDocument7 pagesCrest Audio LA-901 Schematic PDFGuillermo RodriguezNo ratings yet
- YouTube Business - Cheat SheetDocument4 pagesYouTube Business - Cheat SheetChristian WagnerNo ratings yet
- ClusteringDocument7 pagesClusteringRupesh GaurNo ratings yet
- Firebox T80: High-Performance Security That Evolves With Your NetworkDocument2 pagesFirebox T80: High-Performance Security That Evolves With Your NetworkrahmaniqbalNo ratings yet
- Cyber Crime Essay ThesisDocument4 pagesCyber Crime Essay Thesisafcmausme100% (2)
- MI 3125 BT EurotestCOMBODocument2 pagesMI 3125 BT EurotestCOMBOLuis MansillaNo ratings yet
- GV-RX580WF2-8GD - SCH (DIAGRAMAS - COM.BR)Document32 pagesGV-RX580WF2-8GD - SCH (DIAGRAMAS - COM.BR)Ademir BuenoNo ratings yet
- GSM Based Motor Control With 3 Phase DetectionDocument2 pagesGSM Based Motor Control With 3 Phase DetectionSarath MohanNo ratings yet
- Data Science and Bigdata Analytics: Dr. Ali Imran JehangiriDocument20 pagesData Science and Bigdata Analytics: Dr. Ali Imran Jehangirisyed hamzaNo ratings yet
- Excel VBA InStr FunctionDocument6 pagesExcel VBA InStr FunctionYamini ShindeNo ratings yet
- NT00378-11-En PowerLogic T300 User ManualDocument460 pagesNT00378-11-En PowerLogic T300 User ManualmsiantexNo ratings yet
- VISSIM 520 eDocument576 pagesVISSIM 520 eSuriel UrielNo ratings yet
- Trescientos Uno Flanger: Resistors Trim Pots Parts ListDocument1 pageTrescientos Uno Flanger: Resistors Trim Pots Parts ListYeremia OyaNo ratings yet
- 2019-0313 PNJ PM Pertemuan 1Document44 pages2019-0313 PNJ PM Pertemuan 1David Arlas RumapeaNo ratings yet
- Forward/Backward Sweep Method Based On Map Structure For Power Flow Calculation of Distribution SystemDocument4 pagesForward/Backward Sweep Method Based On Map Structure For Power Flow Calculation of Distribution SystemSugar RayNo ratings yet
- Yash Karan Singh RathoreDocument2 pagesYash Karan Singh RathoreYash Karan Singh RathoreNo ratings yet
- What Is A Computer VirusDocument2 pagesWhat Is A Computer VirusRhea MontemayorNo ratings yet
- Troubleshooting User Messages RC TC MCDocument7 pagesTroubleshooting User Messages RC TC MCАлексей ДаниленкоNo ratings yet
- CH 8Document12 pagesCH 8TahirNo ratings yet
- Evolution of Wireless and Mobile CommunicationDocument42 pagesEvolution of Wireless and Mobile Communicationwicked_not_meNo ratings yet
- C Library FunctionsDocument62 pagesC Library FunctionsHarish S KiranNo ratings yet
- GNSS3Document30 pagesGNSS3DheerajKaushalNo ratings yet
- ARINCDirect FOS Brochure-001Document4 pagesARINCDirect FOS Brochure-001kallepalliNo ratings yet
- Wireless Site SurveyDocument52 pagesWireless Site SurveyMSA Systems100% (1)
- Date Tracking in Oracle HRMSDocument3 pagesDate Tracking in Oracle HRMSBick KyyNo ratings yet
- Essbase ASO ImplementationDocument3 pagesEssbase ASO ImplementationAmit SharmaNo ratings yet
- Mobile Computing Assignment: Submitted by Sakaanaa M 2017115583Document31 pagesMobile Computing Assignment: Submitted by Sakaanaa M 2017115583Sakaanaa MohanNo ratings yet
- Computerised Accounting SystemDocument11 pagesComputerised Accounting SystemSatwikNo ratings yet