You might also like
- Betafpv hx115 FixedDocument4 pagesBetafpv hx115 FixedPradeep RaajNo ratings yet
- Betfpvhx 115Document4 pagesBetfpvhx 115Pradeep RaajNo ratings yet
- BTFL - Cli - Backup - Nazgul - Evoque F5D 2023 - 06 - 26 16 - 03 - 27Document4 pagesBTFL - Cli - Backup - Nazgul - Evoque F5D 2023 - 06 - 26 16 - 03 - 27maximilianmartin87No ratings yet
- BTFL 1Document4 pagesBTFL 1Rizky TantyoNo ratings yet
- Apex Frame Voor JimmyDocument3 pagesApex Frame Voor JimmyJoep van der MeijdenNo ratings yet
- DiffDocument4 pagesDiffWernerNo ratings yet
- BTFL Cli Backup Mobula6 ELRS 20230628 185520Document3 pagesBTFL Cli Backup Mobula6 ELRS 20230628 185520WilcoNo ratings yet
- BTFL Cli Backup Mobula6 ELRS 20230704 082151Document4 pagesBTFL Cli Backup Mobula6 ELRS 20230704 082151WilcoNo ratings yet
- Diff all command batch for FURYF4OSDDocument3 pagesDiff all command batch for FURYF4OSDLepoulpeNo ratings yet
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - Lumenier - 20230917 - 004634Document6 pages(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - Lumenier - 20230917 - 004634Dan MultiNo ratings yet
- BTFL Cli Backup Mobula6 ELRS 20230705 165406Document4 pagesBTFL Cli Backup Mobula6 ELRS 20230705 165406WilcoNo ratings yet
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230910 - 161732Document5 pages(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230910 - 161732Dan MultiNo ratings yet
- BTFL Cli Mobula6 ELRS 20230628 184302Document3 pagesBTFL Cli Mobula6 ELRS 20230628 184302WilcoNo ratings yet
- BTFL Cli Backup 20220514 155409Document3 pagesBTFL Cli Backup 20220514 155409Achmad DutaNo ratings yet
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230916 - 172123Document6 pages(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230916 - 172123Dan MultiNo ratings yet
- Diff and Config for Protek 35Document3 pagesDiff and Config for Protek 35Luciano Perez CaminosNo ratings yet
- BTFL Cli Mobula7 HD 20191016 183740Document3 pagesBTFL Cli Mobula7 HD 20191016 183740Luminix RunningtextNo ratings yet
- Flight Controller ParjoDocument3 pagesFlight Controller ParjoRizky TantyoNo ratings yet
- Apexdiffo 3Document2 pagesApexdiffo 3JGM Jaguś Goods MakerNo ratings yet
- F4OSD Default SettingsDocument2 pagesF4OSD Default SettingsJonas Pinheiro de LimaNo ratings yet
- Betaflight HendraDocument3 pagesBetaflight HendraRizky TantyoNo ratings yet
- Tmotor ft5 Tune Back UpDocument2 pagesTmotor ft5 Tune Back UpJoep van der MeijdenNo ratings yet
- Betafpv 95xv3Document3 pagesBetafpv 95xv3Joep van der MeijdenNo ratings yet
- BTFL_cli_Diatone_20190501_210153 540 TYRANTDocument3 pagesBTFL_cli_Diatone_20190501_210153 540 TYRANThacklifeaiNo ratings yet
- BTFL Cli 20210227 105932Document2 pagesBTFL Cli 20210227 105932Joep van der MeijdenNo ratings yet
- Apex Dumpo3Document22 pagesApex Dumpo3JGM Jaguś Goods MakerNo ratings yet
- File CLI Naze 32Document114 pagesFile CLI Naze 32Muhammad Mohd DinNo ratings yet
- WA-602232B4AFC0 CFGDocument6 pagesWA-602232B4AFC0 CFGJosé Luis García BarreraNo ratings yet
- De2 - 115 User ManualDocument27 pagesDe2 - 115 User ManualKenan Emre Üstündağ100% (1)
- WA-788A20EC643B CFGDocument6 pagesWA-788A20EC643B CFGJuan Ce Juan Ce Ramos RodríguezNo ratings yet
- Asus Eee PC 701Document47 pagesAsus Eee PC 701Rosangela MariaNo ratings yet
- Bugreport 2015 08 22 22 55 05Document4,142 pagesBugreport 2015 08 22 22 55 05Gelson Raizer AlvesNo ratings yet
- Contoh TopologiDocument7 pagesContoh Topologiirwan junaidiNo ratings yet
- E7 Printer CFGDocument5 pagesE7 Printer CFGDavid FilipeNo ratings yet
- Litebeam Ac Gen 2 Unlock Frequency ConfigurationDocument4 pagesLitebeam Ac Gen 2 Unlock Frequency ConfigurationkalsomNo ratings yet
- Claves Equipos y Comandos Mas UsadosDocument6 pagesClaves Equipos y Comandos Mas UsadosDIEGO FERNANDO VASQUEZ FARFANNo ratings yet
- Ts 7500 SchematicDocument4 pagesTs 7500 Schematicimransiddiquiatvxt100% (1)
- Bug ReportDocument4,473 pagesBug ReportVijaypalu BoldheadNo ratings yet
- The Signature Display (12-19-2019 4 - 09 - 07 PM)Document31 pagesThe Signature Display (12-19-2019 4 - 09 - 07 PM)darwin paulo dela cruzNo ratings yet
- WA-68D79AAECAF6 CFGDocument5 pagesWA-68D79AAECAF6 CFGRita GuedezNo ratings yet
- CIV LogFileDocument128 pagesCIV LogFileKamezo 先輩 GamingNo ratings yet
- Intel Calpella Block Diagram GuideDocument34 pagesIntel Calpella Block Diagram Guidedutu590No ratings yet
- NVRAM settings for AP6255Document2 pagesNVRAM settings for AP6255haget36081No ratings yet
- RmtRmtsideLatest-114036 OptDocument5 pagesRmtRmtsideLatest-114036 OptRizal LulNo ratings yet
- I 3 CDocument3 pagesI 3 CKiran AlladaNo ratings yet
- Bugreport 2019 07 06 17 41 35Document1,766 pagesBugreport 2019 07 06 17 41 35Diarie TItan'jeNo ratings yet
- FGT100F firewall trace logsDocument9 pagesFGT100F firewall trace logsJuan Carlos YepezNo ratings yet
- UntitledDocument3 pagesUntitledkappaNo ratings yet
- Acer Aspire 6530 ZK3Document43 pagesAcer Aspire 6530 ZK3Jose A LachiondoNo ratings yet
- Bugreport 2017 05 07 21 35 57Document3,025 pagesBugreport 2017 05 07 21 35 57hasan arifNo ratings yet
- Create 9806H Via RemoteDocument4 pagesCreate 9806H Via RemotepenipungeweNo ratings yet
- UntitledDocument3 pagesUntitledkappaNo ratings yet
- Pil1 Hua 6330 Cor A01 01-Huawei3Document11 pagesPil1 Hua 6330 Cor A01 01-Huawei3Yldemar PerezNo ratings yet
- Log2 - Shutdown Not VisibleDocument11 pagesLog2 - Shutdown Not VisibleSparco MNo ratings yet
- x86 StderrDocument3 pagesx86 StderrAnirudha RaneNo ratings yet
- dumpstate report analysisDocument3,729 pagesdumpstate report analysishasan arifNo ratings yet
- CubeDocument40 pagesCubeShantanu DhalNo ratings yet
- Cisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3From EverandCisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3No ratings yet
- Forecast Time Series-NotesDocument138 pagesForecast Time Series-NotesflorinNo ratings yet
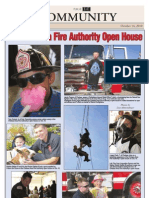
- CAFA Open House HighlightsDocument1 pageCAFA Open House HighlightsDaniel LaiNo ratings yet
- F FS1 Activity 3 EditedDocument15 pagesF FS1 Activity 3 EditedRayshane Estrada100% (1)
- Constructivism improves a lesson on nounsDocument6 pagesConstructivism improves a lesson on nounsOlaniyi IsaacNo ratings yet
- Unit 5 EstándarDocument2 pagesUnit 5 EstándardechillbroNo ratings yet
- 0520 Int OTG P4 MSDocument12 pages0520 Int OTG P4 MSTrévina JosephNo ratings yet
- Computer ViruesDocument19 pagesComputer ViruesMuhammad Adeel AnsariNo ratings yet
- A New Aftercooler Is Used On Certain C9 Marine Engines (1063)Document3 pagesA New Aftercooler Is Used On Certain C9 Marine Engines (1063)TASHKEELNo ratings yet
- Spare Parts List: WarningDocument5 pagesSpare Parts List: WarningÃbdøū Èqúípmeńť MédîcàlNo ratings yet
- Definition and Scope of Public FinanceDocument2 pagesDefinition and Scope of Public FinanceArfiya MubeenNo ratings yet
- Theory and Practice of Crown and Bridge Prosthodontics 4nbsped CompressDocument1,076 pagesTheory and Practice of Crown and Bridge Prosthodontics 4nbsped CompressYuganya SriNo ratings yet
- Amazon Invoice Books 4Document1 pageAmazon Invoice Books 4raghuveer9303No ratings yet
- Consumer Behavior PP Chapter 4Document36 pagesConsumer Behavior PP Chapter 4tuongvyvyNo ratings yet
- FacebookH Cking 1 3 (SFILEDocument10 pagesFacebookH Cking 1 3 (SFILEFitra AkbarNo ratings yet
- Ap4955 PDFDocument4 pagesAp4955 PDFGilvan HenriqueNo ratings yet
- HEC-HMS Tutorials and Guides-V3-20210529 - 140315Document756 pagesHEC-HMS Tutorials and Guides-V3-20210529 - 140315Ervin PumaNo ratings yet
- Gfk-1383a 05012Document108 pagesGfk-1383a 05012occhityaNo ratings yet
- Christos A. Ioannou & Dimitrios A. Ioannou, Greece: Victim of Excessive Austerity or of Severe "Dutch Disease"? June 2013Document26 pagesChristos A. Ioannou & Dimitrios A. Ioannou, Greece: Victim of Excessive Austerity or of Severe "Dutch Disease"? June 2013Christos A IoannouNo ratings yet
- CD 1 - Screening & DiagnosisDocument27 pagesCD 1 - Screening & DiagnosiskhairulfatinNo ratings yet
- 7 - NIBL - G.R. No. L-15380 Wan V Kim - DigestDocument1 page7 - NIBL - G.R. No. L-15380 Wan V Kim - DigestOjie SantillanNo ratings yet
- Senior High School Tracks: Free Powerpoint Templates Free Powerpoint TemplatesDocument11 pagesSenior High School Tracks: Free Powerpoint Templates Free Powerpoint TemplatesGeraldineNo ratings yet
- Nelson Climate Change Plan UpdateDocument37 pagesNelson Climate Change Plan UpdateBillMetcalfeNo ratings yet
- Engr2227 Apr03Document10 pagesEngr2227 Apr03Mohamed AlqaisiNo ratings yet
- Ch10 Stress in Simple WordsDocument7 pagesCh10 Stress in Simple Wordsmanaar munthirNo ratings yet
- 2019 Implementasie-SamsatdiBaliDocument10 pages2019 Implementasie-SamsatdiBaliDiannita SusantiNo ratings yet
- M.Com Second Semester – Advanced Cost Accounting MCQDocument11 pagesM.Com Second Semester – Advanced Cost Accounting MCQSagar BangreNo ratings yet
- A Rail-To-Rail Constant Gain Buffered Op-Amp For Real Time Video ApplicationsDocument8 pagesA Rail-To-Rail Constant Gain Buffered Op-Amp For Real Time Video Applicationskvpk_vlsiNo ratings yet
- HNM Announcement Flyer enDocument2 pagesHNM Announcement Flyer enJali SahiminNo ratings yet
- 2020.07.31 Marchese Declaration With ExhibitsDocument103 pages2020.07.31 Marchese Declaration With Exhibitsheather valenzuelaNo ratings yet
- Creating Literacy Instruction For All Students ResourceDocument25 pagesCreating Literacy Instruction For All Students ResourceNicole RickettsNo ratings yet