You might also like
- M.Tech ProjectDocument89 pagesM.Tech Projectsharath kumarNo ratings yet
- Capacitor Switching Transients ProblemsDocument5 pagesCapacitor Switching Transients Problemsaris09yekofNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Pid 4309039Document10 pagesPid 4309039Solo AnonNo ratings yet
- Radial Distribution Test FeedersDocument5 pagesRadial Distribution Test FeedersAbhishek KukrejaNo ratings yet
- Medium Voltage Industrial VSDDocument11 pagesMedium Voltage Industrial VSDAhmed El SebaiiNo ratings yet
- Hand Book ProteccionesDocument356 pagesHand Book ProteccionesFrozen TgrNo ratings yet
- Simulation and Implementation of FC-TCR: Sumit K Rathor (IEEE Member), Chintan Patel, Mithila S ZodapeDocument10 pagesSimulation and Implementation of FC-TCR: Sumit K Rathor (IEEE Member), Chintan Patel, Mithila S Zodapehamza mandlwiNo ratings yet
- Title: Differential Pair Handling in CADSTAR/P.R.Editor XR HS/SI VerifyDocument14 pagesTitle: Differential Pair Handling in CADSTAR/P.R.Editor XR HS/SI VerifyBorad AlpeshNo ratings yet
- Variable High Voltage DC Power Supply: Design Team 2Document56 pagesVariable High Voltage DC Power Supply: Design Team 2tvs_krishnavarmaNo ratings yet
- 5204 - Assign - 09 BDocument6 pages5204 - Assign - 09 Bveljal6317No ratings yet
- 1MRG014321 en Practical Experience With Differential Protection For Converter TransformersDocument10 pages1MRG014321 en Practical Experience With Differential Protection For Converter TransformersFrancisco MartinezNo ratings yet
- Variable Shunt Reactors Cigre2014 A2 211 2014Document8 pagesVariable Shunt Reactors Cigre2014 A2 211 2014StrahinjaNo ratings yet
- 3 DG Auto Load Sharing SchemeDocument9 pages3 DG Auto Load Sharing Schemeuump100% (1)
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsFrom EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsNo ratings yet
- Interview QuestionsDocument4 pagesInterview Questionsjunaid_ali_10No ratings yet
- Sizing CircuitsDocument130 pagesSizing Circuitsinhenyeronerb100% (17)
- Obstacles Associated With Winding Resistance Measurements of Power TransformersDocument13 pagesObstacles Associated With Winding Resistance Measurements of Power TransformersplutoatkNo ratings yet
- T R 1 - Testing Distance RelaysDocument20 pagesT R 1 - Testing Distance RelaysCarlos Cordero HerreraNo ratings yet
- Benefits of FACTS For Transmission SystemsDocument3 pagesBenefits of FACTS For Transmission SystemsSergio Fonseca RochaNo ratings yet
- Choosing Between Resistor and ReactorDocument8 pagesChoosing Between Resistor and ReactorRaod2No ratings yet
- Low Power ThesisDocument6 pagesLow Power Thesistiffanybarbermobile100% (2)
- Current-Sharing in Power Expansion ArraysDocument5 pagesCurrent-Sharing in Power Expansion ArrayshexbiNo ratings yet
- Double Tail Dynamic CompDocument10 pagesDouble Tail Dynamic CompBhura AnushaNo ratings yet
- Electrical Interview Questions AnswersDocument17 pagesElectrical Interview Questions AnswersSagar Yera91% (11)
- The PSX-1,2,3,4: SeriesDocument10 pagesThe PSX-1,2,3,4: SeriesKURBULDKNo ratings yet
- Damping of Power System Oscillations by VSC-HVDC Multi-Terminal Transmission NetworksDocument49 pagesDamping of Power System Oscillations by VSC-HVDC Multi-Terminal Transmission Networksksg9731No ratings yet
- Career1737 ElectronicsDocument6 pagesCareer1737 Electronicsbabu balochNo ratings yet
- TP Zhen CapacitorsDocument5 pagesTP Zhen Capacitorsauuser2011No ratings yet
- Fault Level CalculationDocument43 pagesFault Level Calculationdrjonesg19585102100% (2)
- Co-Ordination of Overcurrent Relay For Chemical Industrial Plant Using ETAPDocument5 pagesCo-Ordination of Overcurrent Relay For Chemical Industrial Plant Using ETAPHimdad Tahir0% (1)
- P9 Materials For Discussion and ConclusionsDocument8 pagesP9 Materials For Discussion and Conclusionslinkin_slayerNo ratings yet
- RC CircuitsDocument6 pagesRC CircuitsSusan KNo ratings yet
- Application of Capacitors To Power SystemsDocument32 pagesApplication of Capacitors To Power SystemsfvicunaeNo ratings yet
- S&C Bankgard Relays - Types LUC and LGCDocument3 pagesS&C Bankgard Relays - Types LUC and LGCmdc2013No ratings yet
- Simulation and Case Study of AC-DC Hybrid Microgrid PDFDocument27 pagesSimulation and Case Study of AC-DC Hybrid Microgrid PDFsravankotlasNo ratings yet
- EE ckts3Document33 pagesEE ckts3Darren BernardoNo ratings yet
- 400 K VDocument40 pages400 K VsdmtsndNo ratings yet
- 19IPST152Document6 pages19IPST152Faridahmad AziziNo ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Busbar ProtectionDocument10 pagesBusbar ProtectionMohd Taufiq IshakNo ratings yet
- HVDC PHD ThesisDocument6 pagesHVDC PHD Thesisdwt65fcw100% (2)
- New Triacs - Is The Snubber Circuit NecessaryDocument7 pagesNew Triacs - Is The Snubber Circuit NecessaryAlexa DjokicNo ratings yet
- Tips ProtecciónDocument6 pagesTips ProtecciónOscar GarciaNo ratings yet
- Electrical Circuits III PDFDocument42 pagesElectrical Circuits III PDFRolando Cruz50% (2)
- RADSS 3-Phase Busbar Protection (ABB)Document12 pagesRADSS 3-Phase Busbar Protection (ABB)majid_abkoohiNo ratings yet
- E 270 ContentDocument18 pagesE 270 ContentRodel PelimianoNo ratings yet
- ELEC4612-12 Exp 2 Power FlowDocument5 pagesELEC4612-12 Exp 2 Power FlowDavid VangNo ratings yet
- Pitfalls and Fallacies: T DD T DDDocument1 pagePitfalls and Fallacies: T DD T DDCarlos SaavedraNo ratings yet
- Power System Case StudyDocument18 pagesPower System Case Studysmurf aldous100% (1)
- Voltage Profile Improvement by Capacitor Placement and Control in Unbalanced Distribution Systems Using Differential Evolution AlgorithmDocument8 pagesVoltage Profile Improvement by Capacitor Placement and Control in Unbalanced Distribution Systems Using Differential Evolution Algorithmswapna44No ratings yet
- Partial Discharge TestDocument9 pagesPartial Discharge Testsadeeskumar.dNo ratings yet
- !!est Practice Guidelines For Computational Fluid Dynamics of Dispersed Multiphase FlowsDocument131 pages!!est Practice Guidelines For Computational Fluid Dynamics of Dispersed Multiphase FlowsjymmyneutronnNo ratings yet
- CT Class Very ImportantDocument6 pagesCT Class Very ImportantEngr Fahimuddin QureshiNo ratings yet
- 05624580Document13 pages05624580kannanrk1984No ratings yet
- SKM Systems Analysis - Three Winding Transformer Application GuideDocument4 pagesSKM Systems Analysis - Three Winding Transformer Application GuidejamesbitsasNo ratings yet
- NI Tutorial Loads and Pressure MeasurementsDocument4 pagesNI Tutorial Loads and Pressure MeasurementsIvette RamírezNo ratings yet
- Simplified Short-Circuit CalculationsDocument18 pagesSimplified Short-Circuit CalculationsWallie BillingsleyNo ratings yet
- Commutation-Torque-Ripple Minimization in Direct-Torque-Controlled PM Brushless DC DrivesDocument10 pagesCommutation-Torque-Ripple Minimization in Direct-Torque-Controlled PM Brushless DC DrivesmitulNo ratings yet
- 9187 DataBook - REV1Document64 pages9187 DataBook - REV1Sergio HernandezNo ratings yet
- Datasheet LM317 LMDocument17 pagesDatasheet LM317 LMAnonymous nQ4z7PNo ratings yet
- Emisa SCS20-3G CatalogueDocument5 pagesEmisa SCS20-3G Catalogueemisa.tech.officeNo ratings yet
- Signal Conditioning Audio AmplifiersDocument7 pagesSignal Conditioning Audio AmplifiersalexNo ratings yet
- Basic Electronics Lab ManualDocument47 pagesBasic Electronics Lab ManualAlpesh ThesiyaNo ratings yet
- Converter 120ac 4-20ma YokogawaDocument5 pagesConverter 120ac 4-20ma YokogawaJlavieraNo ratings yet
- U-97 Application Note: Modelling, Analysis and Compensation of The Current-Mode ConverterDocument7 pagesU-97 Application Note: Modelling, Analysis and Compensation of The Current-Mode ConverterPowerranger2.0No ratings yet
- Basic Electrical & Electronics Engineering (6 Yrs FRM Jan 02)Document23 pagesBasic Electrical & Electronics Engineering (6 Yrs FRM Jan 02)Jay PandyaNo ratings yet
- MAX1044/ICL7660 Switched-Capacitor Voltage Converters: General Description FeaturesDocument15 pagesMAX1044/ICL7660 Switched-Capacitor Voltage Converters: General Description FeaturesJuan CarlosNo ratings yet
- User and Installation Manual: Output Filter FN5420 and RWK5420Document54 pagesUser and Installation Manual: Output Filter FN5420 and RWK5420jigsaiNo ratings yet
- AOZ1021AIDocument15 pagesAOZ1021AIJohnny La Mesa100% (1)
- Arduino Based Automatic Pneumatic SystemDocument31 pagesArduino Based Automatic Pneumatic Systemnklharish1No ratings yet
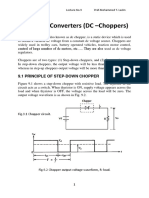
- DC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperDocument18 pagesDC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperSaif UddinNo ratings yet
- Operation and Maintenance Manual With Illustrated Parts List ForDocument154 pagesOperation and Maintenance Manual With Illustrated Parts List ForFred WestlingNo ratings yet
- Unit I and IIDocument46 pagesUnit I and IIYg SonuNo ratings yet
- BC 245 M - DataDocument2 pagesBC 245 M - DataHany AhmedNo ratings yet
- RectifierDocument5 pagesRectifierpreethiNo ratings yet
- Datasheet Ic - Ba5415Document10 pagesDatasheet Ic - Ba5415master -DvNo ratings yet
- Part II" Converter Dynamics and Control!: Fundamentals of Power Electronics! Chapter 7: AC Equivalent Circuit Modeling!Document15 pagesPart II" Converter Dynamics and Control!: Fundamentals of Power Electronics! Chapter 7: AC Equivalent Circuit Modeling!Angie EstupiñanNo ratings yet
- Users Manual: Battery AnalyzerDocument68 pagesUsers Manual: Battery AnalyzerCarlos Cucanchon CardenasNo ratings yet
- Rectifier Power Factor and Pulse-Width Modultion Controlled Rectifier CircuitsDocument23 pagesRectifier Power Factor and Pulse-Width Modultion Controlled Rectifier CircuitsChristopher RoblesNo ratings yet
- DC-DC ChoppersDocument24 pagesDC-DC ChoppersAbdullah NasirNo ratings yet
- TC120 PWM/PFM Step-Down Combination Regulator/Controller: Features General DescriptionDocument12 pagesTC120 PWM/PFM Step-Down Combination Regulator/Controller: Features General DescriptionRijal SaifurNo ratings yet
- Ee460 Lab Manual 2006Document80 pagesEe460 Lab Manual 2006F0x123No ratings yet
- 4.5V To 25V Input, 1ch Synchronous Buck DC/DC Controller: DatasheetDocument24 pages4.5V To 25V Input, 1ch Synchronous Buck DC/DC Controller: DatasheetYnejjamNo ratings yet
- Datasheet HV9910 Universal High Brightness LED DriverDocument11 pagesDatasheet HV9910 Universal High Brightness LED Driverthierry42No ratings yet
- CD11GH FkeDocument2 pagesCD11GH Fkemarina anastasovaNo ratings yet
- 24VACDocument3 pages24VACPankaj RawatNo ratings yet
- Sem 3 Module 2Document5 pagesSem 3 Module 2shubhendra2No ratings yet