You might also like
- Eimt Ncii Set - BDocument23 pagesEimt Ncii Set - BEdgar Martin Guevarra100% (3)
- Bang and Olufsen Beosound 3000 Service ManualDocument68 pagesBang and Olufsen Beosound 3000 Service ManualCarloNo ratings yet
- Load Test On Series GeneratorDocument3 pagesLoad Test On Series Generatorkudupudinagesh88% (8)
- Experiment 8 Synchronous Generator Line SynchronizationDocument10 pagesExperiment 8 Synchronous Generator Line SynchronizationMd Rodi Bidin100% (1)
- Ame 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMDocument7 pagesAme 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMCeline Kate BentayaoNo ratings yet
- Front PageDocument8 pagesFront PageKristoff GermainNo ratings yet
- Ashish Singh 2K20CEEE11 Exp-6Document6 pagesAshish Singh 2K20CEEE11 Exp-6Ashish SinghNo ratings yet
- Report PT 4 (F1002)Document8 pagesReport PT 4 (F1002)Kosigar ChelladoraiNo ratings yet
- Ame 3L Experiment 3 Speed Control of DC Motor by Field Resistance Control AIMDocument7 pagesAme 3L Experiment 3 Speed Control of DC Motor by Field Resistance Control AIMCeline Kate BentayaoNo ratings yet
- CS7Document8 pagesCS7zubairashrafNo ratings yet
- SimulsheshhDocument13 pagesSimulsheshhPaul Brian ferrarisNo ratings yet
- Electrical Machines-I Lab ManualDocument24 pagesElectrical Machines-I Lab Manualankur_sharma_95No ratings yet
- Machine by BhimraDocument5 pagesMachine by BhimraAnonymous m8oCtJBNo ratings yet
- Experiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheoryDocument7 pagesExperiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheorySur ShriNo ratings yet
- Experiment 2Document4 pagesExperiment 2dhruvmistry300No ratings yet
- DC Gen CharactersticsDocument4 pagesDC Gen CharactersticsnyarambabrianNo ratings yet
- Lab 34Document3 pagesLab 34Hilmy AwadNo ratings yet
- Cycle 1 Experiment No. 4 Study of The Steady State Performance of A Separately Excited DC GeneratorDocument4 pagesCycle 1 Experiment No. 4 Study of The Steady State Performance of A Separately Excited DC GeneratorVIJAY KUMARNo ratings yet
- Machines II ManualsDocument37 pagesMachines II ManualsAtharv ParanjpeNo ratings yet
- DC Generator Characteristics Lab ManualDocument5 pagesDC Generator Characteristics Lab ManualVivek RoyNo ratings yet
- D.C Machines. Q&ADocument8 pagesD.C Machines. Q&AVishal SawhNo ratings yet
- Laboratory Session 5 Magnetization Curve of A DC GeneratorDocument7 pagesLaboratory Session 5 Magnetization Curve of A DC GeneratorNatan Bravo GarridoNo ratings yet
- Electric MachineDocument24 pagesElectric Machinemakram.22en498No ratings yet
- Exp 2Document4 pagesExp 2Avneesh KarNo ratings yet
- Lab 3 - DC Motor Speed Control (MANUAL)Document6 pagesLab 3 - DC Motor Speed Control (MANUAL)kimiNo ratings yet
- 02 DC Machines LabDocument8 pages02 DC Machines LabAndubekaNo ratings yet
- Boosted MLIDocument8 pagesBoosted MLIAjmal FarooqNo ratings yet
- Manual Ee IVDocument56 pagesManual Ee IVAkhilesh Kumar MishraNo ratings yet
- Pulse August 2014Document16 pagesPulse August 2014lets_share_sthNo ratings yet
- DC GeneratorDocument6 pagesDC GeneratorUditya K100% (1)
- Total 363 Lab ManualDocument67 pagesTotal 363 Lab ManualBisal Sarker JoyNo ratings yet
- Exp. - 4 Machine LabDocument7 pagesExp. - 4 Machine LabAbdelrahman MuadiNo ratings yet
- Eee 1Document3 pagesEee 1Mustafa AlhumayreNo ratings yet
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Article 169765Document8 pagesArticle 169765خلدون مهند الحديثيNo ratings yet
- Experiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierDocument4 pagesExperiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierMohammed Dyhia Ali100% (3)
- A Novel Dynamic Voltage Restorer Based On Matrix ConvertersDocument7 pagesA Novel Dynamic Voltage Restorer Based On Matrix ConvertersAbdulwahid Al-safanyNo ratings yet
- Improving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshDocument5 pagesImproving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshsarathNo ratings yet
- Objective: Fig 1. Left Hand RuleDocument11 pagesObjective: Fig 1. Left Hand RuleShahir Afif IslamNo ratings yet
- Facts Devices - Solution ManualDocument16 pagesFacts Devices - Solution ManualBirendra Kumar DebtaNo ratings yet
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaNo ratings yet
- EMMPRA3 PracticalGuide - 2021Document14 pagesEMMPRA3 PracticalGuide - 2021Tshepo MolotoNo ratings yet
- No Load and Load Test On A DC Shunt GeneratorDocument3 pagesNo Load and Load Test On A DC Shunt GeneratorHazoorAhmadNo ratings yet
- EE2683 Electric Circuits & Machines Experiment #4: Alternating Current MotorsDocument4 pagesEE2683 Electric Circuits & Machines Experiment #4: Alternating Current Motorsrapahel1819No ratings yet
- Laboratory Experiment 3 TA-AY MEE31Document11 pagesLaboratory Experiment 3 TA-AY MEE31JayNo ratings yet
- Synchronous Motor Test TestDocument5 pagesSynchronous Motor Test TestChidamparam PalaniyappanNo ratings yet
- EECT Experiment 8 Report (Manika Jain 2K19-EE-151)Document5 pagesEECT Experiment 8 Report (Manika Jain 2K19-EE-151)2K19/EE/151 MANIKA JAINNo ratings yet
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşNo ratings yet
- 1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorDocument5 pages1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorRajalakshmi TVNo ratings yet
- Experiment - 06 To Study Magnetisation Characteristics of DC Shunt Generator.Document9 pagesExperiment - 06 To Study Magnetisation Characteristics of DC Shunt Generator.charanrck10No ratings yet
- Define The "Phase Shift"?: Resistance Ohm's LawDocument6 pagesDefine The "Phase Shift"?: Resistance Ohm's LawMuhammad Shahid LatifNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Field Control of DC Shunt Machine IN MATLABDocument7 pagesField Control of DC Shunt Machine IN MATLABabdullNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- EASA, India, Nepal, Pakistan Accelerated 100hr PIC. CPL-SE - ME AddOn P141 2023Document2 pagesEASA, India, Nepal, Pakistan Accelerated 100hr PIC. CPL-SE - ME AddOn P141 2023abheetpethe.scoe.entcNo ratings yet
- India Cadet ProgramDocument3 pagesIndia Cadet Programabheetpethe.scoe.entcNo ratings yet
- Remote Sensing 5Document16 pagesRemote Sensing 5abheetpethe.scoe.entcNo ratings yet
- IC Joshi Meteorology (1) - Paper2Document4 pagesIC Joshi Meteorology (1) - Paper2abheetpethe.scoe.entcNo ratings yet
- Exp No 7Document3 pagesExp No 7abheetpethe.scoe.entcNo ratings yet
- Sarker 2016Document5 pagesSarker 2016abheetpethe.scoe.entcNo ratings yet
- Keith Williams CP PNRDocument78 pagesKeith Williams CP PNRabheetpethe.scoe.entcNo ratings yet
- Instrumentation QP 3Document16 pagesInstrumentation QP 3abheetpethe.scoe.entc100% (1)
- FOC DecodeDocument28 pagesFOC Decodeabheetpethe.scoe.entcNo ratings yet
- IFR Made EasyDocument15 pagesIFR Made Easyabheetpethe.scoe.entcNo ratings yet
- CVDocument4,270 pagesCVAryan Nhemaphuki100% (1)
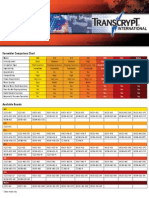
- Transcrypt - ComparacionDocument1 pageTranscrypt - ComparacionLeonardo SantosNo ratings yet
- STRAMADocument6 pagesSTRAMAClaude PeñaNo ratings yet
- MIS Assignmnet by Rakibul IslamDocument15 pagesMIS Assignmnet by Rakibul IslamMD Arafat RahmanNo ratings yet
- PARKER PS1 DatasheetDocument2 pagesPARKER PS1 Datasheetxteam_hosurNo ratings yet
- MSL Manual 2561403Document24 pagesMSL Manual 2561403Gene LiNo ratings yet
- Ananya Chakraborty: BjectiveDocument2 pagesAnanya Chakraborty: BjectiveHRD CORP CONSULTANCYNo ratings yet
- Snaken Ladder DOCDocument23 pagesSnaken Ladder DOCÊvîl ÂttïtùðeNo ratings yet
- TMAG5170A1EDGKRQ1 (TI Hall Effect Sensor)Document61 pagesTMAG5170A1EDGKRQ1 (TI Hall Effect Sensor)Vikaas PansheriaNo ratings yet
- Make-to-Order Production With Variant Configuration (1YT - IN)Document47 pagesMake-to-Order Production With Variant Configuration (1YT - IN)sowjanyaNo ratings yet
- Manual SDC 3.5Document290 pagesManual SDC 3.5Tp LinkNo ratings yet
- Transducers and Signal ConditionersDocument157 pagesTransducers and Signal Conditionersrohit pooniaNo ratings yet
- (HBR 1960 10 Must Read) Marketing MyopiaDocument2 pages(HBR 1960 10 Must Read) Marketing MyopiaChangKwon ChungNo ratings yet
- Safer Cyberspace Masterplan 2020Document32 pagesSafer Cyberspace Masterplan 2020adinaNo ratings yet
- Fix DNS Probe Finished No Internet Windows 10 - by Windows101tricks - MediumDocument6 pagesFix DNS Probe Finished No Internet Windows 10 - by Windows101tricks - Mediumabdalkadr abdalahNo ratings yet
- Varia DorDocument296 pagesVaria DorGabriel Esteban VenegasNo ratings yet
- Shahbaz FinalDocument86 pagesShahbaz FinalShahbaz AnwarNo ratings yet
- Developmentof Bilateral Teleoperation Systemswith Force FeedbackDocument76 pagesDevelopmentof Bilateral Teleoperation Systemswith Force FeedbackMUSTAFA ÖZKİPRİTNo ratings yet
- Data Sheet 6ES7214-1HF40-0XB0: General InformationDocument8 pagesData Sheet 6ES7214-1HF40-0XB0: General InformationZélia OrnelasNo ratings yet
- Digital Timer: V0Ddts1, V0Ddts V0Ddtd1, V0Ddtd Cat. NoDocument2 pagesDigital Timer: V0Ddts1, V0Ddts V0Ddtd1, V0Ddtd Cat. NoLuis Manuel100% (1)
- 7340 ServiceManual RevBDocument159 pages7340 ServiceManual RevBSergio Alejandro CastroNo ratings yet
- Traverse Reading Testing FormDocument1 pageTraverse Reading Testing FormJHON CHRISTOPHER CENTINONo ratings yet
- Job Description - Technology and Research AssociateDocument2 pagesJob Description - Technology and Research Associateavi0073No ratings yet
- Overview of AngularDocument13 pagesOverview of AngularRofak Vkm1No ratings yet
- 6SE B SEGP48 Manual VER1Document103 pages6SE B SEGP48 Manual VER1Hrishita MavaniNo ratings yet
- Eendv 110001 - dv11 EngineDocument178 pagesEendv 110001 - dv11 EnginenpachecorecabarrenNo ratings yet
- Datasheet FAP2602 EnglishDocument2 pagesDatasheet FAP2602 EnglishMina BarsoomNo ratings yet
- What Is A Bioclimatic Chart - EHowDocument2 pagesWhat Is A Bioclimatic Chart - EHowonkhgfg kjhh jghNo ratings yet