You might also like
- Differential Calculus (Of FunctionDocument7 pagesDifferential Calculus (Of FunctionTanglaysun N SangmaNo ratings yet
- CHE 301 HW 2 Abdulaziz AlhoutiDocument3 pagesCHE 301 HW 2 Abdulaziz AlhoutiTimelessNo ratings yet
- Game Programming For T.Y. Computer Science StudentsDocument57 pagesGame Programming For T.Y. Computer Science StudentsAartiNo ratings yet
- 07 Lesson-4-Longitudinal-Vehicle-Modeling C1M4L4 - Longitudinal Vehicle ModelDocument9 pages07 Lesson-4-Longitudinal-Vehicle-Modeling C1M4L4 - Longitudinal Vehicle ModelprogisNo ratings yet
- +1 - Vol-2 - em l6-l10 PrintDocument21 pages+1 - Vol-2 - em l6-l10 PrintNiharika ChouhanNo ratings yet
- EN.535.426 Kinematics and Dynamics of Robots Module 3: Review of Linear AlgebraDocument13 pagesEN.535.426 Kinematics and Dynamics of Robots Module 3: Review of Linear AlgebraJonathan MichaelNo ratings yet
- Semi-Implicit Method For Pressure-Linked Equations (SIMPLE) - Solution in MATLAB®Document14 pagesSemi-Implicit Method For Pressure-Linked Equations (SIMPLE) - Solution in MATLAB®jackimNo ratings yet
- 3D Solid Element FEMDocument25 pages3D Solid Element FEMKaran PatelNo ratings yet
- 26 Dec Himanshu BinomialDocument54 pages26 Dec Himanshu BinomialKinjal JainNo ratings yet
- Scalars and VectorsDocument18 pagesScalars and VectorsTAHA QAZINo ratings yet
- Folmula SheetDocument6 pagesFolmula SheetMariam MahmoudNo ratings yet
- Sesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument22 pagesSesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauNo ratings yet
- Physics 1 Vectors: Eng. Louay KarakerDocument10 pagesPhysics 1 Vectors: Eng. Louay KarakerlouayNo ratings yet
- Physics 1 - L4Document10 pagesPhysics 1 - L4louayNo ratings yet
- Physics 1 - L4Document10 pagesPhysics 1 - L4louayNo ratings yet
- Vehicle Cooling Load Calculation (Part I)Document6 pagesVehicle Cooling Load Calculation (Part I)Saurabh BhorNo ratings yet
- Equation SheetDocument2 pagesEquation SheetStevenNo ratings yet
- Chapter 4 - PermeabilityDocument31 pagesChapter 4 - PermeabilityAhmad MammadovNo ratings yet
- Chapter 4 - PermeabilityDocument31 pagesChapter 4 - PermeabilityAhmad MammadovNo ratings yet
- Binomial TheoremDocument19 pagesBinomial TheoremTonikay MillerNo ratings yet
- Basic Maths For Civil Engineering - Sandeep JyaniDocument45 pagesBasic Maths For Civil Engineering - Sandeep JyaniVenkata RamanaNo ratings yet
- Notes On Trig Identities Part 3Document10 pagesNotes On Trig Identities Part 3dustinosugodNo ratings yet
- Integrative Engineering A: Algebra and Advance AlgebraDocument40 pagesIntegrative Engineering A: Algebra and Advance Algebralynser chuaNo ratings yet
- Rate laws for hydrolysis of ethyl acetate and reactions of nitric oxideDocument2 pagesRate laws for hydrolysis of ethyl acetate and reactions of nitric oxideJosé Kaisor Angara100% (1)
- 17 FluidsimDocument28 pages17 FluidsimShahid IslamNo ratings yet
- CIRCUITOS ELÉCTRICOS Conceptos y LeyesDocument43 pagesCIRCUITOS ELÉCTRICOS Conceptos y LeyesNOCTURN & NIGHT BLACKNo ratings yet
- Solved Problems On L.C and BasisDocument2 pagesSolved Problems On L.C and BasisAnas EldenNo ratings yet
- BL Session 03Document5 pagesBL Session 03shanoon77No ratings yet
- SPP positioning with pseudorangesDocument2 pagesSPP positioning with pseudorangesFelix JaimesNo ratings yet
- BASCALQ4Document5 pagesBASCALQ4Marjuline De GuzmanNo ratings yet
- Algebra Formulas and TricksDocument7 pagesAlgebra Formulas and Tricksimvikasverma1997No ratings yet
- FLUID MECHANICS QUESTIONSDocument12 pagesFLUID MECHANICS QUESTIONSnaiaraNo ratings yet
- Math 3 (Conic Sections & Circle)Document27 pagesMath 3 (Conic Sections & Circle)John Benedict AlardeNo ratings yet
- Mechanical Vibrations CEP-1Document10 pagesMechanical Vibrations CEP-1Muhib FarooquiNo ratings yet
- P10 11bDocument4 pagesP10 11bPrayoga AgustoNo ratings yet
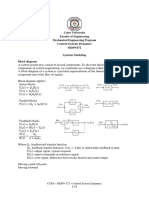
- System dynamic reportDocument3 pagesSystem dynamic report7mooooody979No ratings yet
- Notes On Trig EquationsDocument11 pagesNotes On Trig EquationsdustinosugodNo ratings yet
- Sesion 15Document11 pagesSesion 15Diego ValerioNo ratings yet
- Lecture 3Document5 pagesLecture 3akhbar elyoum academyNo ratings yet
- Online Class 1 23.01.22Document17 pagesOnline Class 1 23.01.22Abdul QuddusNo ratings yet
- Vector Calculus-Lec-1 & 2Document41 pagesVector Calculus-Lec-1 & 2Subhan MansoorNo ratings yet
- MMC 2019 Grade 8 Division Elimination Round Questions With SolutionsDocument51 pagesMMC 2019 Grade 8 Division Elimination Round Questions With SolutionsNoreen100% (1)
- Identidades Trigonometricas para Arcos CompuestosDocument25 pagesIdentidades Trigonometricas para Arcos CompuestosVilma Rimarachin SanchezNo ratings yet
- 7 IntegrationDocument7 pages7 Integrationأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- 7 IntegrationDocument7 pages7 Integrationأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- INEQTR1Document1 pageINEQTR1ibibibbNo ratings yet
- INEQTR1Document1 pageINEQTR1ibibibbNo ratings yet
- INEQTR1Document1 pageINEQTR1ibibibbNo ratings yet
- INEQTR1Document1 pageINEQTR1ibibibbNo ratings yet
- Rohini 93493285136Document7 pagesRohini 93493285136Kavi SanjaiNo ratings yet
- 1576423697825_1- AlgebraDocument22 pages1576423697825_1- AlgebrasultanbekzhumagalievNo ratings yet
- Fluid Kinematics ExplainedDocument30 pagesFluid Kinematics ExplainedMohammad SaabNo ratings yet
- Rate Limiting StepDocument4 pagesRate Limiting Stepanak tengikNo ratings yet
- Design Optimization (ME41613) + Engineering Design Optimization (ME60079)Document21 pagesDesign Optimization (ME41613) + Engineering Design Optimization (ME60079)HarishNandanNo ratings yet
- 6 Differentiation Rules 2024Document23 pages6 Differentiation Rules 2024alliztairgabriellabartolome18No ratings yet
- PR - Alexia 14.0Document3 pagesPR - Alexia 14.0Piero yosip Basilio AylasNo ratings yet
- Caida LibreDocument12 pagesCaida Librefredy chozo tunoqueNo ratings yet
- Egyptian Russian University, Faculty of Engineering, Mechatronics Department, 4 YearDocument7 pagesEgyptian Russian University, Faculty of Engineering, Mechatronics Department, 4 YearSam Mohammed AliNo ratings yet
- Lecture No 19Document7 pagesLecture No 19GGCTTS BooksNo ratings yet
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- s.5 Ire1 Notes The Collection and Compilation of The Holy Qur'AnDocument16 pagess.5 Ire1 Notes The Collection and Compilation of The Holy Qur'Anabubakari meregulwaNo ratings yet
- Bio For Olevel PDFDocument422 pagesBio For Olevel PDFNalweyiso JoyceNo ratings yet
- Continental Drifting Theory ExplainedDocument71 pagesContinental Drifting Theory ExplainedAndrew mulabbiNo ratings yet
- Business Notes Ent OlevelDocument164 pagesBusiness Notes Ent Olevelkaziba stephenNo ratings yet
- Poincaré Bendixson Theorem. Liénard SystemsDocument13 pagesPoincaré Bendixson Theorem. Liénard Systemsabubakari meregulwaNo ratings yet
- PERTURBATION THEORYDocument18 pagesPERTURBATION THEORYzcaptNo ratings yet
- q2 q3 Solution 9709 - w21 - QP - 11Document2 pagesq2 q3 Solution 9709 - w21 - QP - 11SC CHIMNo ratings yet
- Exercises Debye ShieldingDocument6 pagesExercises Debye ShieldingnjalalianmNo ratings yet
- Iapws If97Document48 pagesIapws If97appar1982No ratings yet
- Intro to Thermodynamics LawsDocument33 pagesIntro to Thermodynamics LawsJanicz Balderama0% (1)
- Principal Strains and InvariantsDocument8 pagesPrincipal Strains and InvariantsLong Đinh HoàngNo ratings yet
- Gas Laws: Pressure, Volume, and Absolute TemperatureDocument60 pagesGas Laws: Pressure, Volume, and Absolute Temperaturetalhawasim100% (1)
- Notes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias OsborneDocument97 pagesNotes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias Osbornedaniel_teivelisNo ratings yet
- H.E. Puthoff - Casimir Vacuum Energy and The Semiclassical ElectronDocument4 pagesH.E. Puthoff - Casimir Vacuum Energy and The Semiclassical ElectronRtpomNo ratings yet
- TDs 2022 2023Document11 pagesTDs 2022 2023Moiz AmirNo ratings yet
- Expansion of GasesDocument3 pagesExpansion of GasesashaNo ratings yet
- Lorentz and Parity Transformations of the Dirac EquationDocument10 pagesLorentz and Parity Transformations of the Dirac EquationPreetham VarmaNo ratings yet
- Module 5Document8 pagesModule 5Mogbekeloluwa Koye-LadeleNo ratings yet
- Boyce ODEch 7 S 3 P 22Document4 pagesBoyce ODEch 7 S 3 P 22Severus SnapeNo ratings yet
- Bandwidth theorem limits time-frequency resolutionDocument9 pagesBandwidth theorem limits time-frequency resolutionJoel50% (2)
- Goldstein Classical Physics PDFDocument3 pagesGoldstein Classical Physics PDFRyanNo ratings yet
- BTD-Final Lesson PlanDocument22 pagesBTD-Final Lesson PlanSunil BajantriNo ratings yet
- Kech106 PDFDocument32 pagesKech106 PDFPhantomAssaulterNo ratings yet
- Linear Algebra Model Question PapersDocument11 pagesLinear Algebra Model Question PapersNaveenNo ratings yet
- Problems On Symmetrical Parabolic Curve PDFDocument20 pagesProblems On Symmetrical Parabolic Curve PDFJoash Normie DuldulaoNo ratings yet
- Komal Kumar Mallick PDFDocument2 pagesKomal Kumar Mallick PDFKomal KumarNo ratings yet
- Homework 7 - Air Standard Otto Cycle AnalysisDocument7 pagesHomework 7 - Air Standard Otto Cycle AnalysisTitin IrawatiNo ratings yet
- Topic 3 - Thermal Physics - IB PhysicsDocument10 pagesTopic 3 - Thermal Physics - IB PhysicsAzzahra Yeasmin SaikaNo ratings yet
- Bridgman's Thermodynamic Equations: From Wikipedia, The Free EncyclopediaDocument4 pagesBridgman's Thermodynamic Equations: From Wikipedia, The Free EncyclopedialotannaNo ratings yet
- Determination of Changes in Internal Energy and Enthalpy:: Thermodynamics Session - 7Document5 pagesDetermination of Changes in Internal Energy and Enthalpy:: Thermodynamics Session - 7mukesh3021No ratings yet
- CH 11 Compressible FlowDocument76 pagesCH 11 Compressible FlowEssa RasanNo ratings yet
- Tugas 3Document4 pagesTugas 3rarahahaNo ratings yet
- LiouVille's TheoremDocument3 pagesLiouVille's TheoremMuhammad kawish iqbal100% (1)
- 3B Chapter3 Sec.3.5 3.6 ColorDocument50 pages3B Chapter3 Sec.3.5 3.6 ColorAdven SimarmataNo ratings yet
- Chapter 7 (Additional Notes) Thermodynamics Review (Power Plant Technology by M Wakil)Document29 pagesChapter 7 (Additional Notes) Thermodynamics Review (Power Plant Technology by M Wakil)Aries SattiNo ratings yet
- MATH1231 TutorialDocument6 pagesMATH1231 TutorialMr. WayneNo ratings yet