Professional Documents
Culture Documents
AP4111 Manual Electronic System Design
Uploaded by
hmpudur1968Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
AP4111 Manual Electronic System Design
Uploaded by
hmpudur1968Copyright:
Available Formats
lOMoARcPSD|35477619
AP4111 Manual
Electronics & Communication Engineering (Anna University)
Studocu is not sponsored or endorsed by any college or university
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 1 Design of a 4-20 mA transmitter for a bridge type
transducer.
DATE :
AIM:
To design an Instrumentation amplifier with the bridge type transducer and
convert the amplified voltage from the instrumentation amplifier to 4 – 20 mA current
using op-amp.
APPARATUS REQUIRED:
S.No Name of the Apparatus Range Quantity
1 Operational Amplifier IC741 4
10KΩ 10
2 Resistor 1kΩ 4
150Ω 1
3 DRB - 1
4 Dual Power Supply (0-24V) 1
5 Rheostat (0-100Ω) 1
6 Ammeter (0-250µA) 1
7 Multimeter - 1
THEORY:
INSTUMENTATION AMPLIFIER:
Instrumentation amplifier is generally required in any measurement system using
electrical transducers to enhance signal levels often in low voltage less than mV. Also it
is required to provide impedance matching and isolation. When the desired input rides
over a common mode signal special amplifier are needed so that difference signals get
amplified to an acceptable level while the common mode signals get attenuated.
The physical quantities can be converted into electrical quantities by using
transducer. The output of the transducer needs to be amplified to get the meter
readings. This amplification is done by using instrumentation amplifier. The output of
instrumentation amplifier drives of indicator or display system. The important features
of an instrumentation amplifier are high gain accuracy, high CMRR, high gain stability
with low temperature co-efficient, low dc offset, low output impedance.
Low input impedance may load the signal source heavily. Therefore high
resistance buffer is used preceding each input to avoid this loading effect. For V1 =V2
under common mode condition. If V’2 =V2 and V’1 =V1 both the operational amplifiers
act as voltage follower. If V1 V2 the circuit has differential gain by the formula VO/ (V2-
V1)=1+(2R/R‘).
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
CIRCUIT DIAGRAM:
BRIDGE CIRCUIT:
INSTRUMENTATION AMPLIFIER:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
DESIGN:
Output voltage VO = (1 + ( 2R / R‘)) (V2 -V1)
Differential gain Ad = VO / (V2 - V1)
= 1 + (2R / R‘)
Choose R = 10kΩ
For Ad max = 100
100 = 1 + (20k/R‘)
R’ = 20K Ω / 99
R’ max = 200Ω.
For Ad min = 10
10 = 1 + (20k/R‘)
R’ min = 2.2KΩ.
IL = I1+I2
I1 = (V-(V0/2)) / R
I2 = (V0-(V0/2)) / R
IL = (V-(V0/2) + (V0-(V0/2)) / R
= (V-V0+V0) / R = V/R
IL is independent of RL. If R is constant, then IL αV
PROCEDURE:
1. The connections are made as per the circuit diagram.
2. The bridge circuit was balanced by varying 100Ω Rheostat.
3. The output voltage V1 and V2 of balanced circuit were given as input to the op-amp
A1 and A2.
4. Varying the resistance R1 the bridge circuit the voltage V1 and V2 were varied.
5. Varying the R’ the output voltage was measured then the differential gain was
calculated using formula,
=20 log (VO/(V2 -V1)).
V to I CONVERTER:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PIN DIAGRAM:
MODEL GRAPH:
TABULAR COLUMN:
Displacement
Output Voltage Output Voltage
from initial Gain (dB)
(V) (mA)
place (cm)
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
RESULT:
Thus the Instrumentation amplifier was designed with the bridge type transducer and
the output was verified successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 2 DESIGN OF AC/DC VOLTAGE REGULATOR USING SCR
DATE :
AIM:
(i)To design, construct and test a AC voltage regulator using SCR.
(ii)To design, construct and test a DC voltage regulator using SCR.
APPARATUS REQUIRED:
AC VOLTAGE REGULATOR:
S.No Name of the Apparatus Range Quantity
1 Transformer 230V/12V 1
2 SCR 2P4M 2
3 Diode BY 127 2
100kΩ 2
4 Resistor
12K 1
5 Bread Board 1
6 Connecting Wires As Required
7 CRO 1
8 DRB 1
DC VOLTAGE REGULATOR:
S.No Name of the Apparatus Range Quantity
1 Transformer 230V/24V 1
2 SCR TYN 604 2
3 Diode IN4001 2
4 Resistor 10k 2
5 Bread Board 1
6 Connecting Wires As Required
7 CRO 1
8 DRB 1
9 IC 7812 1
1000uf 1
10 Capacitors
100uf 1
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
CIRCUIT DIAGRAM:
AC VOLTAGE REGULATOR:
DC VOLTAGE REGULATOR:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
THEORY:
The SCR is switched ON and OFF to regulate the output voltage in AC and DC voltage
regulator.
AC VOLTAGE REGULATOR:
If the SCR is connected to AC supply and load, the power flow can be controlled
by varying the RMS value of AC voltage applied to the load and this type of power circuit
is caused as AC voltage regulator. Applications of AC voltage regulator are in heating on
load transformers for changing light controls, speed controls and polyphase controls,
induction motors and AC magnet controls for power transfer. Two types of power control
are normally used.
i)ON-OFF control
ii)Polyphase Angle control
AC regulators are those converter which converts fixed ac voltage directly to
variable ac voltage of the same frequency. The load voltage is regulated by controlling
the firing angle of SCRs. AC voltage controllers are thyristor based devices. The most
common circuit is the inverse parallel SCR pair in which two isolated gate signals are
applied. Each of the two SCRs are triggered at alternate half cycles of the supply and
the load voltage is part of input sine wave. The SCR is an unidirectional device like
diode, it allows current flow in only one direction but unlike diode, it has built-in feature
to switch ON and OFF. The switching of SCR is controlled by gate and biasing condition.
This switching property of SCR allows to control the ON periods thus controlling average
power delivered to the load.
In this circuit SCR1 is forward biased during positive half cycle and SCR2 is
forward biased during negative half cycle. SCR1 is triggered at the firing angle ωt=α and
supply voltage is impressed on the load resistance(RL). It conducts from the remaining
positive half cycle, turning OFF when the anode voltage becomes zero at ωt=π.
SCR2 is triggered at the firing angle ωt=α+π and conducts till ωt=2π. Hence the
load is alternating in polarity and is part of sine wave. The firing angle of both SCRs is
controlled by gate circuit. The conduction period of SCR is controlled by varying gate
signals within specified values of maximum and minimum gate currents.
For gate triggering, a signal is applied between the gate and cathode of the device.
AC sources are normally used as gate signals. This provides proper isolation
between power.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PIN DETAILS:
AC VOLTAGE REGULATOR:
DC VOLTAGE REGULATOR:
MODEL GRAPH:
AC VOLTAGE REGULATOR:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
DC VOLTAGE REGULATOR:
If SCR’s are used to convert an AC voltage into DC voltage then they are known
as DC voltage regulators. Eg. Battery changes for high current capacity batteries in DC
voltage control only phase control is used. The transformer is used to step down the
voltage from 230V to 24V. This is given as input to bridge rectifier. The bridge rectifier
converts incoming ac signal to unidirectional wave. Therefore we get full wave rectifier
output at the output of bridge rectifier. This is given as input to SCR. The gate of SCR
is triggered with firing angle of α. During positive half cycle, diode D1 and D2 conducts
and during negative half cycle, diode D3 and D4 conducts. The full wave rectified output
is given to capacitive filter. The output of capacitor is dc that it eliminates ripple contents
of bridge rectifier output. The dc input is given to regulator IC. The unregulated output
must be 2V greater than regulated output voltage. The load current may vary from 0 to
rated maximum output current. The output voltage is regulated dc.
DESIGN:
AC VOLTAGE REGULATOR USING SCR:
Triggering circuit for SCR:
12 V ac is rectified by diode BY 127. SCR 2P4M is used to trigger.
Let the current be 1mA. R=V/I=12V/1mA=12KΩ.
DC VOLTAGE REGULATOR USING SCR:
Triggering circuit for SCR:
24 V ac is rectified by diode 1N4001. SCR TYN604 is used to trigger.
Let the current be 1mA. R=V/I=12V/1mA=12KΩ
PROCEDURE:
AC VOLTAGE REGULATOR USING SCR:
1. Connections are made as shown in the circuit diagram.
2. The supply is given by means of step down transformer.
3. Anode terminal of SCR1 is connected to the anode terminal of diode, is connected
to cathode of SCR1 by means of resistor as the load.
4. Hence the voltage regulation is verified at load terminal.
DC VOLTAGE REGULATOR USING SCR:
1. Connect the two terminals at the top of bridge rectifier.
2. The positive terminal of the bridge rectifier is connected to one terminal at the
load and at the other terminal to anode terminal of SCR.
3. The pin 15 connected from the power supply to the load.
4. Then the DC voltage regulation is checked and verified.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
TABULAR COLUMN:
AC VOLTAGE REGULATOR:
DRB 1 value(KΩ) Amplitude (V) TON(ms)
DC VOLTAGE REGULATOR:
DRB value(KΩ) Amplitude (V) TON(ms)
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
RESULT:
Thus AC and DC voltage regulators were designed, constructed and the output
waveforms were drawn.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
CIRCUIT DIAGRAM:
Full Wave Rectifier Circuit
PCB LAYOUT TOP LAYER:
PCB LAYOUT BOTTOM LAYER:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 3 PCB LAYOUT DESIGN USING CAD
DATE :
AIM:
To design a PCB layout using CAD software for a Simple Electronic Circuit.
COMPONENTS REQUIRED:
1. Personal Computer
2. NI Multisim Software
PROCEDURE:
Multisim:- It is a schematic capture and simulation application that assists you in
carrying out the major steps in the circuit design flow. Multisim can be used for both
analog and digital circuits and also includes mixed analog/digital simulation capability,
and microcontroller co-simulation. Simulating the circuits before building them,
catches errors early in the design flow, saving time and money.
Ultiboard:- Ultiboard is fed from Multisim, is used to design printed circuit boards,
perform certain basic mechanical CAD operations, and prepare them for manufacturing.
Ultiboard also provides automated parts placement and layout
Steps:
1. In this exercise, you will place and wire the components in the circuit
2. Double click on the component and select ‘Edit footprint’.
3. Then click on ‘Select from Data base’.
4. Now Select the footprint [RES1300 – 7000C2500], and click [Select].
5. Transfer the schematic design to Ultiboard 10 by selecting Transfer » Transfer
to Ultiboard 10.
6. Select [Transfer] / [Transfer to Ultiboard 10]. A standard Windows Save As
dialog box appears. Specify the name and location of the files to be created and
click [Save]. Multisim creates files that can then be loaded into Ultiboard.
7. Enter the desired parameters and click [OK].
8. After click [OK] new window will pop-up
9. The dialog should appear after select [Transfer] / [Transfer to Ultiboard 10].
Change the width to 10 mils, and the clearance to 10 mils. Click [OK] to close
dialog box.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
10. Make sure all fields are selected in Import Netlist Action selection and click
[OK].
11. A board outline (a yellow rectangular) is placed on the workplace with the
components (above the board outline) ready to be placed
12. Working with the Board Outline. Right-click the edge of yellow rectangle
and select Properties from the menu. This launch a Rectangular Properties
dialog.
13. Under the rectangular tab, set the Units to mil, the Width to 1000 and the
Height to 900. Click OK to close the dialog box and the board outline becomes
much smaller
14. Now u can see the board outline becomes much smaller
15. Select the components and drag them until they are above the board
outline.
16. Select ‘view’ and click on ‘3D preview’.
17. Now you can see the 3D view dialog box
18. Select ‘Auto route’ and then select ‘Start/Resume Auto router’
19. Now the circuit become auto routed.
20. Place the components in preferred location and then check the design rule.
21. Select ‘start auto router trace optimisation’
22. After ‘start auto router trace optimisation’ the board will appear
23. Ultiboard Configuration. Select [Options] >> [Global Preferences], and then
select the General Settings tab. Make sure it matches below settings.
24. Select PCB Design tab and make sure you choose Auto trace narrowing and
Auto add teardrop. Click OK to close the dialog box.
25. Select [Options] >> [PCB Properties], and then go to Copper Layers tab.
Change Board thickness to 59.00 mil.
26. Next, go to the Pad/Vias tab, and modify the settings as shown. How to
calculate annular ring? For example, a 50 mil drill hole (radius of 25 mils) with
a relative value of .6 (60%) will create an annular ring of 15 mils (60% of 25
mils).
27. Go to Design Rules tab, and the “Use multiple clearances” checkbox must
be selected. Otherwise, only clearance to traces will be operational. Set the
“Clearance to Traces” parameter to 40.000000 mils; “Clearance to Pads”,
“Clearances to Vias” and Clearance to” Copper Areas” parameters to
32.000000 mils. Click OK to close dialog box.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
28. Power and Ground Planes. Select [Place] >> [Power plane]. Select net 0 for
Copper Bottom Layer. Click [OK] to close the dialog box. The bottom layer fills
in red color plane.
29. Now select ‘File’» ‘Print’ and then this dialog window will pop-up
30. Select ‘copper top’ alone then select ‘preview’.
31. Select ‘Tool’» view 3D. Then select full screen option.
RESULT:
Thus the schematic of simple electronic circuit and design of PCB layout using
CAD was done successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 4 HDL based design entry and simulation of Parameterizable
cores of Counters, Shift registers, State machines, 8-bit Parallel
adders and 8 –Bit multipliers.
DATE :
4.1 SIMPLE COUNTER
AIM:
To design and verify its output of 4-bit Counter in Verilog HDL Code.
TOOLS REQUIRED:
i) PC
ii) Xilinx ISE 9.1i
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File -> New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
COUNTER DIAGRAM:
4 BIT COUNTER GRAPH:
4 BIT COUNTER TRUTH TABLE:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM CODING:
module cnt
(
input clk,
input rst,
output reg [3:0] count
);
always @ (posedge clk)
begin
if (rst)
count <= "0000";
else
count <=count+1;
end
endmodule
SIMULATION GRAPH:
RESULT:
Thus the design of 4-bit counter in Verilog HDL Code is done and its output is
verified successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
4.2 Universal Shift Register
AIM:
To design and implement FPGA based Universal Shift Register using
VHDL.
TOOLS REQUIRED:
i) PC
ii) Xilinx ISE 9.1i
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File -> New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
THEORY:
Universal shift register is capable of converting input data to parallel or
serial which also does shifting of data bidirectional, unibirectional (SISO, SIPO,
PISO, PIPO) and also parallel load this is called Universal shift register.
Shift Register are used as: Data storage device, Delay element,
Communication lines, Digital Electronics devices (Temporary data storage, data
transfer, data manipulation, counter), etc.
PROCEDURE:
The ALU circuit is designed and the Boolean function is found out.
The Verilog Module Source for the circuit is written.
It is implemented in Model Sim and Simulated.
Signals are provided and Output Waveforms are viewed.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
CIRCUIT DIAGRAM
TABLE:
MODE CONTROL REGISTER
S1 S0 OPERATION
0 0 NO CHANGE
0 1 SHIFT LEFT
1 0 SHIFT RIGHT
PARALLEL
1 1
LOAD
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM
module uni_shift_8b(op,clk,rst_a, load,sh_ro_lt_rt,ip);
output reg [7:0] op;
input load;
input [1:0] sh_ro_lt_rt;
input [7:0] ip;
input clk, rst_a;
reg [7:0]temp;
always @(posedge clk or posedge rst_a)
begin
if (rst_a)
op = 0;
else
case(load)
1'b1:
begin //Load Input
temp = ip;
end
1'b0: //Operation
case (sh_ro_lt_rt)
2'b00: op = temp<<1; //Left Shift
2'b01: op = temp>>1; //Right Shift
2'b10: op = {temp[6:0],temp[7]}; //Rotate Left
2'b11: op = {temp[0], temp[7:1]}; //Rotate Right
default: $display("Invalid Shift Control Input");
endcase
default: $display("Invalid Load Control Input");
endcase
end
endmodule
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
OUTPUT
RESULT
Thus the Verilog programs for universal shift register were written,
synthesized, simulated and implemented using Xilinx tools and FPGA.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
4.3 FINITE STATE MACHINE
AIM:
To design a Finite State Machine and to verify its simulation results.
TOOLS REQUIRED:
iii) PC
iv) Xilinx ISE 9.1i
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File -> New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM CODING:
modulefsm(input wire clk,rst,
input wire a,b,
output wire y0,y1 );
localparam [1:0] s0 = 2'b00,
s1 = 2'b01,
s2 = 2'b10;
reg [1:0]state_reg,state_next;
always @ (posedgeclk,posedgerst)
if (rst)
state_reg<=s0;
else
state_reg<= state_next;
always @ *
case (state_reg)
s0: if(a)
if(b)
state_next =s2;
else
state_next =s1;
,else
state_next =s0;
s1:if (a)
state_next =s0;
else
state_next = s1;
s2:state_next = s0;
default:state_next =s0;
endcase
//Mealy state machine
assign y1 = (state_reg ==s0)||(state_reg ==s1);
//Moore state machine
assign y0 = (state_reg==s0) & a & b;
endmodule
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
SIMULATION OUTPUT:
RESULT:
Thus the design of finite state machine in Verilog HDL Code is done and its
output is verified successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
4.4 ADDER 8-BIT
AIM:
To design and verify its output of a 8-bit adder in Verilog HDL Code.
TOOLS REQUIRED:
i) PC
ii) Xilinx ISE 9.1i
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File -> New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
FULL ADDER CIRCUIT:
FULL ADDER TRUTH TABLE:
8-BIT ADDER:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM CODING:
module adder(a, b, ci, sum, co);
input ci;
input [7:0] a;
input [7:0] b;
output [7:0] sum;
output co;
wire [8:0] tmp;
assign tmp = a + b + ci;
assign sum = tmp [7:0];
assign co = tmp [8];
endmodule
SIMULATION OUTPUT:
RESULT:
Thus the design of 8-bit adder in Verilog HDL Code is done and its output is
verified successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
4.4 MULTIPLIER (4-Bit)
AIM:
To design a 4 Bit Multiplier and to verify its simulation results.
TOOLS REQUIRED:
i) PC
ii) Xilinx ISE 9.1i
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
BLOCK DIAGRAM:
TRUTH TABLE:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM CODING:
module fg(a, b, res);
input [3:0] a;
input [3:0] b;
output [7:0] res;
reg [7:0] res;
always @(a or b )
begin
res=a * b;
end
endmodule
SIMULATION OUTPUT:
RESULT:
Thus the simulation of 4 –bit Multiplier is done and the output is verified.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Simple Distributed Arithmetic System
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 5 HDL based design entry and simulation of Parameterizable cores
on the simple Distributed Arithmetic system. Test vector
generation and timing analysis.
DATE :
AIM:
To design and implement HDL based Distributed Arithmetic System using
Verilog and to obtain timing analysis report.
TOOLS REQUIRED:
i) PC
ii) Xilinx ISE 9.1i
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Distributed Arithmetic System
Distributed Arithmetic (DA) is a technique that is bit serial in nature. It can
therefore appear to be slow
It turns out that when the number of elements in a vector is nearly the same as
the word size, DA is quite fast
DA `replaces’ the explicit multiplications by ROM look-ups Æ an efficient
technique to implement on Field Programmable Gate Arrays (FPGAs)
In DA, multiplications are reordered and mixed such that the arithmetic
becomes “distributed” through the structure rather than being “lumped”
Area savings from using DA can be up to 80% in DSP hardware designs
While distributed arithmetic technique itself has been around for more than 30
years (Peled and Liu, 1974), interest in this has been revived by the use of Field
Programmable Gate Arrays (FPGAs) for DSP
When DA is implemented in FPGAs, one can take advantage of memory in
FPGAs to implement the Multiply and Accumulate (MAC) operation
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Program:
module da (clk_80, rst_80, x_in_80, y_out_80);
input clk_80,rst_80;
input [3:0] x_in_80;
output [5:0] y_out_80;
reg [3:0] x0_80, x1_80, x2_80, x3_80, x4_80, x5_80;
wire [5:0] a0,a1,a2,a3;
reg [5:0] y_out_80;
wire cout0_80, cout1_80, cout2_80, cout00_80, oflow00_80, oflow0_80,
oflow1_80, oflow2_80;
wire [6:0] result0_80, result1_80, a3_comp_80, a3_sat_80;
wire [6:0] sat_result0_80, sat_result1_80;
wire [8:0] result2_80, sat_result2_80;
wire [5:0] y_rounded_80;
always @(posedge clk_80 or posedge rst_80)
begin
if (rst_80) begin
x0_80 <= 0;
x1_80 <= 0;
x2_80 <= 0;
x3_80 <= 0;
x4_80 <= 0;
x5_80 <= 0;
end
else begin
x0_80 <= x_in_80;
x1_80 <= x0_80;
x2_80 <= x1_80;
x3_80 <= x2_80;
x4_80 <= x3_80;
x5_80 <= x4_80;
end
end
//LookUp Table
lut l3
(.in_80({x5_80[3],x4_80[3],x3_80[3],x2_80[3],x1_80[3],x0_80[3]}),.out_80(a3));
lut l2
(.in_80({x5_80[2],x4_80[2],x3_80[2],x2_80[2],x1_80[2],x0_80[2]}),.out_80(a2));
lut l1
(.in_80({x5_80[1],x4_80[1],x3_80[1],x2_80[1],x1_80[1],x0_80[1]}),.out_80(a1));
lut l0
(.in_80({x5_80[0],x4_80[0],x3_80[0],x2_80[0],x1_80[0],x0_80[0]}),.out_80(a0));
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
add a_1 (.dataa({a1,1'b0}), .datab({{a0[5]},a0}), .cout(cout0_80), .overflow(oflow0_80),
.result(result0_80));
add a_00 (.dataa({~a3[5:0],1'b1}), .datab({7'b1}), .cout(cout00_80),
.overflow(oflow00_80), .result(a3_comp_80));
add a_2 (.dataa(a3_sat_80), .datab({{a2[5]},a2}), .cout(cout1_80),
.overflow(oflow1_80), .result(result1_80));
add9 a (.dataa({sat_result1_80,2'b00}),
.datab({{2{sat_result0_80[6]}},sat_result0_80}), .cout(cout2_80), .overflow(oflow2_80),
.result(result2_80));
//Saturation Logic
saturation_logic s0 ( .sum_saturated_80(sat_result0_80), .sum_80(result0_80),
.carry_80(cout0_80), .oflow_80(oflow0_80) );
saturation_logic s00 ( .sum_saturated_80(a3_sat_80),
.sum_80({(rst_80)?7'b0:a3_comp_80}), .carry_80(cout00_80), .oflow_80(oflow00_80) );
saturation_logic s1 ( .sum_saturated_80(sat_result1_80), .sum_80(result1_80),
.carry_80(cout1_80), .oflow_80(oflow1_80) );
saturation_logic s2 ( .sum_saturated_80(sat_result2_80), .sum_80(result2_80),
.carry_80(cout2_80), .oflow_80(oflow2_80) );
defparam
s0.WIDTH_SUM = 7;
defparam
s00.WIDTH_SUM = 7;
defparam
s1.WIDTH_SUM = 7;
defparam
s2.WIDTH_SUM = 9;
rounding_logic r1( .prod_rounded_80(y_rounded_80), .prod_80(sat_result2_80) );
defparam
r1.WIDTH_PROD = 9,
r1.WIDTH_PROD_ROUNDED = 6;
always @(posedge clk_80 or posedge rst_80)
begin
if (rst_80) begin
y_out_80 <= 0;
end
else begin
y_out_80 <= y_rounded_80;
end
end
endmodule
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Result:
Thus the design and implementation of HDL based Distributed Arithmetic
System using Verilog was done and iming analysis was done successfully. .
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 6 HDL based design entry and simulation of Parameterizable
cores on memory design and 4 – bit ALU. Synthesis, P&R and
post P&R simulation, Critical paths and static timing analysis
results to be identified. FPGA real time programming and I/O
interfacing
DATE :
AIM:
To design and implement FPGA based ALU using Verilog and to obtain
Synthesis, P&R and post P&R simulation, Critical paths and static timing
analysis synthesis report.
APPARATUS REQUIRED:
Synthesis Tools : Xilinx ISE.
Simulation Tools : Model sim Simulator.
Kit : FPGA Board- Spartan 3E
General : Personal Computer (PC).
THEORY:
It is a digital circuit that performs arithmetic and logical operations. The
ALU is a fundamental building block of the CPU of a computer and even the
simplest microprocessors contain of for purposes such as maintaining timers.
The processors found inside modern CPU’s and graphic processing units
accommodate very powerful and very complex ALU’s.
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
CIRCUIT DIAGRAM
OUTPUT
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM
module alu(y,a,b,cin,s);
output [7:0]y;
input [7:0]a,b;
input cin;
input [3:0]s;
reg [7:0]y;
always@(a,b,s)
begin
case(s)
4'b0000:y=a;
4'b0001:y=a+1;
4'b0010:y=a-1;
4'b0011:y=b;
4'b0100:y=b+1;
4'b0101:y=b-1;
4'b0110:y=a+b;
4'b0111:y=a+b+cin;
4'b1000:y=~a;
4'b1001:y=~b;
4'b1010:y=a&b;
4'b1011:y=a/b;
4'b1100:y=~(a&b);
4'b1101:y=~(a/b);
4'b1110:y=a^b;
4'b1111:y=~(a^b);
endcase
end
endmodule
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
SYNTHESIS REPORT:
====================================================
* Final Report *
====================================================
Final Results
RTL Top Level Output File Name : alu.ngr
Top Level Output File Name : alu
Output Format : NGC
Optimization Goal : Speed
Keep Hierarchy : NO
Design Statistics
# IOs : 29
Cell Usage :
# BELS : 208
# GND :1
# INV :1
# LUT1 :7
# LUT2 : 27
# LUT3 : 41
# LUT4 : 28
# MUXCY : 21
# MUXF5 : 34
# MUXF6 : 16
# MUXF7 :8
# VCC :1
# XORCY : 23
# IO Buffers : 29
# IBUF : 21
# OBUF :8
====================================================
Device utilization summary:
---------------------------
Selected Device : 3s250epq208-4
Number of Slices : 54 out of 2448 2%
Number of 4 input LUTs : 104 out of 4896 2%
Number of IOs : 29
Number of bonded IOBs : 29 out of 158 18%
---------------------------
Partition Resource Summary:
---------------------------
No Partitions were found in this design.
---------------------------
====================================================
TIMING REPORT
Clock Information:
------------------
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
No clock signals found in this design
Asynchronous Control Signals Information:
----------------------------------------
No asynchronous control signals found in this design
Timing Summary:
---------------
Speed Grade: -4
Minimum period: No path found
Minimum input arrival time before clock: No path found
Maximum output required time after clock: No path found
Maximum combinational path delay: 11.772ns
Timing Detail:
--------------
All values displayed in nanoseconds (ns)
====================================================
Timing constraint: Default path analysis
Total number of paths / destination ports: 708 / 8
-------------------------------------------------------------------------
Delay : 11.772ns (Levels of Logic = 9)
Source : b<1> (PAD)
Destination: y<7> (PAD)
Data Path : b<1> to y<7>
Gate Net
Cell : in->out fanout Delay Delay Logical Name (Net Name)
---------------------------------------- ------------
IBUF : I->O 12 1.218 1.136 b_1_IBUF
(Madd_y_addsub00022)
LUT4 : I0->O 3 0.704 0.566
Madd_y_addsub0002_xor<4>111 (N172)
LUT3 : I2->O 2 0.704 0.482
Madd_y_addsub0002_xor<6>111 (N6)
LUT3 : I2->O 1 0.704 0.499 Madd_y_addsub0002_xor<7>11
LUT3 : I1->O 1 0.704 0.000 Mmux_y_722 (N55)
MUXF5 : I0->O 1 0.321 0.000 Mmux_y_5_f5_14
(Mmux_y_5_f515)
MUXF6 : I1->O 1 0.521 0.000 Mmux_y_4_f6_6
(Mmux_y_4_f67)
MUXF7 : I0->O 1 0.521 0.420 Mmux_y_2_f7_6 (y_7_OBUF)
OBUF : I->O 3.272 y_7_OBUF (y<7>)
----------------------------------------
Total 11.772ns (8.669ns logic, 3.103ns route)
(73.6% logic, 26.4% route)
====================================================
CPU : 5.67 / 6.31 s | Elapsed : 5.00 / 6.00 s
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PLACE AND ROUTE ANALYSIS:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
POWER ANALYSIS:
Power summary: I(mA) P(mW)
----------------------------------------------------------------
Total estimated power consumption : 52
---
Vccint 1.20V : 15 19
Vccaux 2.50V : 12 30
Vcco25 2.50V : 2 4
---
Inputs : 0 0
Logic : 0 0
Outputs:
Vcco25 0 0
Signals : 0 0
---
Quiescent Vccint 1.20V : 15 19
Quiescent Vccaux 2.50V : 12 30
Quiescent Vcco25 2.50V : 2 4
Thermal summary:
----------------------------------------------------------------
Estimated junction temperature : 27C
Ambient temp : 25C
Case temp : 26C
Theta J-A : 37C/W
STATIC TIMING ANALYSIS:
Data Sheet report:
-----------------
All values displayed in nanoseconds (ns)
Pad to Pad
---------------+---------------+---------+
Source Pad |Destination Pad| Delay |
---------------+---------------+---------+
a<0> |y<0> | 12.114|
a<0> |y<1> | 13.434|
a<0> |y<2> | 13.182|
a<0> |y<3> | 13.898|
a<0> |y<4> | 13.927|
a<0> |y<5> | 13.342|
a<0> |y<6> | 13.354|
a<0> |y<7> | 14.080|
a<1> |y<1> | 12.826|
a<1> |y<2> | 12.811|
a<1> |y<3> | 13.524|
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
a<1> |y<4> | 13.592|
a<1> |y<5> | 13.114|
a<1> |y<6> | 13.054|
a<1> |y<7> | 13.729|
a<2> |y<2> | 11.459|
a<2> |y<3> | 12.349|
a<2> |y<4> | 12.650|
a<2> |y<5> | 12.065|
a<2> |y<6> | 12.125|
a<2> |y<7> | 12.803|
a<3> |y<3> | 11.963|
a<3> |y<4> | 12.691|
a<3> |y<5> | 12.149|
a<3> |y<6> | 12.197|
a<3> |y<7> | 12.764|
a<4> |y<4> | 13.375|
a<4> |y<5> | 12.800|
a<4> |y<6> | 13.327|
a<4> |y<7> | 13.555|
a<5> |y<5> | 12.420|
a<5> |y<6> | 12.953|
a<5> |y<7> | 13.679|
a<6> |y<6> | 12.856|
a<6> |y<7> | 13.258|
a<7> |y<7> | 12.448|
b<0> |y<0> | 11.869|
b<0> |y<1> | 13.658|
b<0> |y<2> | 13.406|
b<0> |y<3> | 14.122|
b<0> |y<4> | 14.151|
b<0> |y<5> | 13.566|
b<0> |y<6> | 13.578|
b<0> |y<7> | 14.304|
b<1> |y<1> | 12.136|
b<1> |y<2> | 12.121|
b<1> |y<3> | 12.834|
b<1> |y<4> | 13.040|
b<1> |y<5> | 12.651|
b<1> |y<6> | 12.759|
b<1> |y<7> | 13.368|
b<2> |y<2> | 11.375|
b<2> |y<3> | 12.545|
b<2> |y<4> | 13.065|
b<2> |y<5> | 12.316|
b<2> |y<6> | 12.571|
b<2> |y<7> | 12.799|
b<3> |y<3> | 12.111|
b<3> |y<4> | 12.661|
b<3> |y<5> | 12.371|
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
b<3> |y<6> | 12.509|
b<3> |y<7> | 13.295|
b<4> |y<4> | 11.862|
b<4> |y<5> | 11.375|
b<4> |y<6> | 11.814|
b<4> |y<7> | 12.342|
b<5> |y<5> | 11.194|
b<5> |y<6> | 11.970|
b<5> |y<7> | 12.198|
b<6> |y<6> | 11.576|
b<6> |y<7> | 12.064|
b<7> |y<7> | 12.238|
cin |y<0> | 12.673|
cin |y<1> | 13.026|
cin |y<2> | 13.635|
cin |y<3> | 14.631|
cin |y<4> | 14.879|
cin |y<5> | 14.130|
cin |y<6> | 14.385|
cin |y<7> | 14.613|
s<0> |y<0> | 11.005|
s<0> |y<1> | 10.529|
s<0> |y<2> | 10.972|
s<0> |y<3> | 12.755|
s<0> |y<4> | 11.764|
s<0> |y<5> | 12.522|
s<0> |y<6> | 11.937|
s<0> |y<7> | 11.965|
s<1> |y<0> | 10.323|
s<1> |y<1> | 10.524|
s<1> |y<2> | 10.508|
s<1> |y<3> | 11.030|
s<1> |y<4> | 11.779|
s<1> |y<5> | 11.269|
s<1> |y<6> | 11.811|
s<1> |y<7> | 11.822|
s<2> |y<0> | 10.556|
s<2> |y<1> | 10.144|
s<2> |y<2> | 10.121|
s<2> |y<3> | 10.643|
s<2> |y<4> | 11.222|
s<2> |y<5> | 10.714|
s<2> |y<6> | 10.783|
s<2> |y<7> | 11.038|
s<3> |y<0> | 9.914|
s<3> |y<1> | 9.231|
s<3> |y<2> | 9.254|
s<3> |y<3> | 9.763|
s<3> |y<4> | 10.134|
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
s<3> |y<5> | 9.301|
s<3> |y<6> | 10.120|
s<3> |y<7> | 10.374|
---------------+---------------+---------+
Analysis completed Mon Mar 21 10:57:12 2022
--------------------------------------------------------------------------------
Peak Memory Usage: 112 MB
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
RESULT
Thus the design and implement FPGA based ALU using VHDL was done
successfully and Synthesis, P&R and post P&R simulation, Critical paths and
static timing analysis synthesis report was obtained.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO :7 DESIGN OF FPGA BASED MEMORIES (RAM)
DATE :
AIM
To design and implement FPGA based memories (RAM) using Verilog.
APPARATUS REQUIRED
Synthesis Tools : Xilinx ISE.
Simulation Tools : Model sim Simulator.
Kit : FPGA Board- Spartan 3E
General : Personal Computer (PC) with Parallel to JTAG
cable.
THEORY
Random Access Memory (RAM) is a type of computer data storage. Its
mainly used as main memory of a computer. RAM allows to access the data
in any order, i.e random. The word random thus refers to the fact that any
piece of data can be returned in a constant time, regardless of its physical
location and whether or not it is related to the previous piece of data. You
can access any memory cell directly if you know the row and column that
intersect at that cell. Most of the RAM chips are volatile types of memory,
where the information is lost after the power is switched off. There are some
non-volatile types such as, ROM, NOR-Flash.
PROCEDURE
Go to xilinx ISE 9.1i software
Go to File New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation ->
Click on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
CIRCUIT DIAGRAM
PROGRAM
module rammod (clk, we, addr, din, dout);
input clk;
input we;
input [4:0] addr;
input [3:0] din;
output [3:0] dout;
reg [3:0] ram [31:0];
reg [3:0] dout;
always @(clk)
begin
if (we)
ram[addr] <= din;
else
dout <= ram[addr];
end
endmodule
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
OUTPUT
RESULT
Thus the Verilog programs for memories (RAM) were written, synthesized,
simulated and implemented using Xilinx tools and FPGA.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 8 Realization of Discrete Fourier transform/Fast Fourier
Transform algorithm in HDL and observing the spectrum in
simulation.
DATE :
AIM:
To realize a Fast Fourier Transform algorithm in HDL and observe the spectrum
in simulation.
TOOLS REQUIRED:
iii) PC
iv) Xilinx ISE 9.1i
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File -> New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Fast Fourier Transform:
The FFT is a fast algorithm for computing the DFT. If we take the 2-point DFT and 4-
point DFT and generalize them to 8-point, 16-point, ..., 2r -point, we get the FFT
algorithm. To compute the DFT of an N-point sequence using equation (1) would take
O(N2 ) multiplies and adds. The FFT algorithm computes the DFT using O(N log N)
multiplies and adds.
Below is a diagram of an 8-point FFT, where W = W8 = e−iπ/4 = (1 − i)/√2
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM:
module four_fft( a,b,c,d,A,Ai,B,Bi,C,Ci,D,Di);
input [3:0] a;
input[3:0] b;
input[3:0] c;
input[3:0] d;
output [5:0] A;
output [5:0] Ai;
output[5:0] B;
output [5:0] Bi;
output[5:0] C;
output [5:0] Ci;
output[5:0] D;
output [5:0] Di;
assign A = a+b+c+d;
assign Ai=0;
assign B=a-c;
assign Bi=b-d;
assign C= a+c-b-d;
assign Ci=0;
assign D=a-c;
assign Di= b-d;
endmodule
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
WAVEFORM:
RESULT:
Thus a Fast Fourier Transform algorithm in HDL was realized and the spectrum
was observed successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Program:
module sdpll(i_clk, i_ld, i_step, i_ce, i_input, i_lgcoeff, o_phase, o_err);
parameter PHASE_BITS = 32;
parameter [0:0] OPT_TRACK_FREQUENCY = 1'b1;
localparam MSB=PHASE_BITS-1;
//
input wire i_clk;
//
input wire i_ld;
input wire [(MSB-1):0] i_step;
//
input wire i_ce;
input wire i_input;
input wire [4:0] i_lgcoeff;
output wire [PHASE_BITS-1:0] o_phase;
output reg [1:0] o_err;
endmodule
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EXP. NO: 9 Invoke PLL module and demonstrate the use of the PLL for clock
generation in FPGAs. Verify design functionality implemented in
FPGA by capturing the signal in Oscilloscope
DATE :
AIM:
To Invoke PLL module and demonstrate the use of the PLL for clock generation in
FPGAs
TOOLS REQUIRED:
PC
Xilinx ISE 9.1i
FPGA Kit
CRO
PROCEDURE:
Go to xilinx ISE 9.1i software
Go to File -> New project -> Project name-> next -> New source -> Verilog
module -> File name -> next -> set i/p & o/p ports -> Finish
Type the program in the space
After the program is written go to Synthesis XST -> Check Syntax
If the syntax is correct, proceed
Go to Project -> New source -> Test bench waveform -> Save
Click on combinational internal clock -> Set the input -> Save
Towards left hand side change the source for behavioral simulation -> Click
on the file name which you saved for test bench waveform
Go to Processes -> Xilinx ISE simulator -> Simulator behavioral mode ->
Generate Self checking test bench
Go to (or) click on Simulate Behavioral mode
Now the output waveform is displayed in the simulation dialog box
Phase Locked Loop (PLL)
A phase-locked loop (PLL) is an electronic circuit with a voltage or voltage-driven
oscillator that constantly adjusts to match the frequency of an input signal. PLLs are
used to generate, stabilize, modulate, demodulate, filter or recover a signal from a
"noisy" communications channel where data has been interrupted. At its simplest, a
phase-locked loop is a closed-loop feedback control circuit that's both frequency- and
phase-sensitive
The main goal of a PLL is to synchronize the output oscillator signal with a
reference signal. Even if the two signals have the same frequency, their peaks and
troughs may not occur in the same place.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Output Waveform:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
A PLL reduces phase errors between output and input frequencies. When the
phase difference between these signals is zero, the system is said to be "locked." And
this locking action depends on the PLL's ability to provide negative feedback
A PLL consists of three key components:
Phase detector (also known as a phase comparator or mixer) - It compares the
phases of two signals, and generates a voltage according to the phase difference.
It multiplies the reference input and the voltage-controlled oscillator output.
Voltage-controlled oscillator - Generates a sinusoidal signal, whose frequency
closely matches the center frequency provided by the low-pass filter.
Low-pass filter - A kind of loop filter that attenuates the high-frequency
alternating current (AC) component of the input signal to smoothen and flatten
the signal to make it more DC-like.
PLLs are used in dozens of applications; among them are:
•telecommunications systems
•computers
•radio
•other electronic systems
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Results:
Thus the PLL module designed and use of the PLL for clock generation in FPGAs
was demonstrated successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Flowchart:
START
Include header file
Define DIP switch
EXECUTE
NO
If LED turns
on when
switch on
YE
END
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EX.NO: 10 INTERFACING DIP SWITCH WITH ARM 7 PROCESSOR
DATE:
Aim:
To write an embedded C program for interfacing DIP switch with ARM Processor
using Keil-C.
Apparatus Required:
1. PC
2. Keil – C Software
3. Flash Magic Software
4. ARM Processor Kit
Algorithm:
1. Start the program.
2. Include LPC2148 header file.
3. Define GPIO
4. Define DIP Switch
5. Define Delay
6. Execute the program
7. End the program.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Program:
#include<LPC214x.h> // Define LPC2148 Header File
#define LED 16 // Define LED to Port1 // LED start @ p1.16 ( total led -> 8 no.
#define Switch 24 // Define SWITCH TO Port1 // SWITCH start @ p1.23 (total switch -> 8 no.
Void delay (int x);
int main(void)
{
unsigned char Status=1;
PINSEL2 = 0x00000FF0; // Define p1.16... P1.31 port lines as GPIO (DIP SW - I/O))
IO1DIR = 0x00 << Switch; //Configure P1.24 - P1.31 as Input -> (0)
IO1DIR|= 0xFF << LED; //Configure P1.16 - P1.23 as Output -> (1)
While (1) // Loop forever
{
Status = 1;
IOSET1 = 0xFF << LED;
delay (10);
IOCLR1 = 0xFF << LED;
delay (30);
while (~Status)
{
Status = ((IO1PIN & (0xFF << Switch)) >> Switch);
IO1PIN = ((~Status) << LED);
}
}
}
Void delay (int x) // Delay function
{
Unsigned int y, z;
For(y = x; y > 0; y--)
For (z = 0; z < x; z++);
}
PIN DETAILS:
Connect J15 & J16 using 10 pin FRC cable
SWITCH PORT PIN CONFIGURATION
Sw 1 P1.24 uC PIN -> 32
Sw 2 P1.25 uC PIN -> 28
Sw 3 P1.26 uC PIN -> 24
Sw 4 P1.27 uC PIN -> 64
Sw 5 P1.28 uC PIN -> 60
Sw 6 P1.29 uC PIN -> 56
Sw 7 P1.30 uC PIN -> 52
Sw 8 P1.31 uC PIN -> 20
OUTPUT:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Inference:
With this experiment, concept of interfacing the DIP Switch with LPC 2148
ARM Processor kit can be understood.
Result:
Thus embedded C program for interfacing of Buzzer were written and it was
executed in LPC2148 ARM Processor and its output was verified successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Flowchart:
START
Include header file
Define Buzzer
Set Delay
EXECUTE
NO
If motor
rotates
YE
END
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EX.NO: 11 INTERFACING BUZZER WITH ARM 7 PROCESSOR
DATE:
Aim:
To write an embedded C program for interfacing Buzzer with ARM Processor using
Keil-C.
Apparatus Required:
1. PC
2. Keil – C Software
3. Flash Magic Software
4. ARM Processor Kit
Algorithm:
1. Start the program.
2. Include LPC2148 header file.
3. Define GPIO
4. Define Buzzer pin
5. Execute the program
6. End the program.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
PROGRAM:
#include<LPC214x.h> // Define LPC2148 Header File
void delay(int x);
int main(void)
{
PINSEL0 = 0x00021000; // Define port lines as GPIO
IO0DIR = 0x00000400; // IOPIN0 Define P0.10 as dirction -> o/p
IOPIN0 = 0x00000000; // IOPIN0 Define P0.10 as zero
while(1) // Loop forever
{
IOPIN0 = 0x00000400; // Turn ON P0.10
delay(2000); // delay(2000) ; 2000 -> means delay time, if you want you have to change delay
time
IOPIN0 = 0x00000000; // Turn OFF P0.10
delay(2000); // delay(2000) ; 2000 -> means delay time, if you want you have to change
delay time
}
}
void delay(int x) // Delay function
{
unsigned int y,z;
for(y = x;y > 0;y--)
for(z = 0;z < x;z++);
}
PIN DETAILS:
PIN DETAILS: connect J17 & J19 using 10 pin FRC cable
PORT PIN CONFIGURATION
Buzzer P0.10 uC PIN -> 35
OUTPUT:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Inference:
With this experiment, concept of interfacing the Buzzer with LPC 2148 ARM
Processor kit can be understood.
Result:
Thus embedded C program for interfacing of DIP Switch were written and
it was executed in LPC2148 ARM Processor and its output was verified successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Flowchart:
START
SET integer int x;
SET GPIO PINS NO
YES
If DELAY
value is set
EXECUTION
END
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
EX.NO : 12 INTERFACING OF LED WITH ARM 7 PROCESSOR
DATE :
Aim:
To write an embedded C program for Blinking LED in LPC2148 ARM Processor using
Keil-C.
Apparatus Required:
1. PC
2. Keil – C Software
3. Flash Magic Software
4. ARM Processor Kit
Algorithm:
1. Start the program.
2. Include LPC2148 header file.
3. Define GPIO pins
4. Define port lines
5. Set delay value for ON and OFF.
6. Execute the program
7. End the program.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Program:
#include<LPC214x.h> // Define LPC2148 Header File
void delay(int x);
int main (void)
{
PINSEL2 = 0x00000000; // Define port lines as GPIO
IO1DIR = 0x00FF0000; // Define P1.16 - P1.23 as O/P
IOPIN1 = 0x00000000; // Define P1.16 - P1.23 as zero
While (1) // Loop forever
{
IOPIN1 = 0x000FF000; // Turn ON P1.16 - P1.23
Delay (2000); // delay (2000); 2000 -> means delay time, if you want
you have to change delay time
IOPIN1 = 0x00000000; // Turn OFF P1.16 - P1.23
Delay (2000); // delay (2000); 2000 -> means delay time, if you want you
have to change delay time
}
}
Void delay (int x) // Delay function
{
Unsigned int y, z;
For(y = x;y > 0;y--)
For (z = 0; z < x; z++);
}
PIN DETAILS:
PIN DETAILS: connect J8 & J9 using 10 pin FRC cable
LED PORT PIN CONFIGURATION
LED1 P1.16 uC PIN -> 16
LED2 P1.17 uC PIN -> 12
LED3 P1.18 uC PIN -> 8
LED4 P1.19 uC PIN -> 4
LED5 P1.20 uC PIN -> 48
LED6 P1.21 uC PIN -> 44
LED7 P1.22 uC PIN -> 40
LED8 P1.23 uC PIN -> 36
Output:
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Inference:
With this basic LED Blinking experiments, basic steps in LPC2148 ARM
Processor can be understood easily. And concept of setting delay value for blinking LED
can be understood.
Result:
Thus embedded C program for Blinking LED were written and it was
executed in LPC2148 ARM Processor and its output was verified successfully.
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
lOMoARcPSD|35477619
Downloaded by keerthana subramani (hmpudur1968@gmail.com)
You might also like
- Ie ManualDocument49 pagesIe ManualPURUSHOTHAMAN MNo ratings yet
- Digital Experiments 22-6-19Document111 pagesDigital Experiments 22-6-19allanjwilsonNo ratings yet
- Ee694 Power Electronics Lab Manual PDFDocument24 pagesEe694 Power Electronics Lab Manual PDFSabeeh HasnainNo ratings yet
- Op-Amp Tester Project ReportDocument6 pagesOp-Amp Tester Project ReportEeshan UpadhyayNo ratings yet
- 19ec401 - Ec1 - 2021 - 2022 Lab Manual PDFDocument53 pages19ec401 - Ec1 - 2021 - 2022 Lab Manual PDFKarthi&coNo ratings yet
- DatasheetDocument17 pagesDatasheetAlaa Ibrahem AhmedNo ratings yet
- Electrical and ElectronicsDocument63 pagesElectrical and ElectronicsMr. P. Muthuvel EIE-RESEARCH FACULTYNo ratings yet
- Agsie - Johnmark Exp1Document7 pagesAgsie - Johnmark Exp1CloudFarmInnovations IncorporatedNo ratings yet
- SN 65 HVD 33Document32 pagesSN 65 HVD 33craigslist_nNo ratings yet
- Dept. of Electrical and Electronics Gogte Institute of Technology, Belagavi Linear IC's and Applications Laboratory (18EEL46)Document30 pagesDept. of Electrical and Electronics Gogte Institute of Technology, Belagavi Linear IC's and Applications Laboratory (18EEL46)BaakdNo ratings yet
- Power Electronics ManualDocument61 pagesPower Electronics ManualS Piyush Piyush0% (1)
- Gate Driver For N-Channel Mosfet: Experiment 6Document34 pagesGate Driver For N-Channel Mosfet: Experiment 6Noona MigleiNo ratings yet
- ESD Lab Manual PDFDocument67 pagesESD Lab Manual PDFAnonymous mg0FcO1xjNo ratings yet
- Lab Manual EC II Format 2Document53 pagesLab Manual EC II Format 2nishavs100% (1)
- ReportDocument2 pagesReportArka EnergyNo ratings yet
- AEC Manual 2018-2019Document99 pagesAEC Manual 2018-2019Raza SikandarNo ratings yet
- Design of DC Power Supply Circuit: Experiment No - 5Document3 pagesDesign of DC Power Supply Circuit: Experiment No - 5Gautam Kumar DeepakNo ratings yet
- Electronics Circuit I Lab Manual FinalDocument46 pagesElectronics Circuit I Lab Manual FinalSanjay KumarNo ratings yet
- GE Fanuc IC694MDL940: Output Module, Relay 2 Amp 16 Point, Non Isolated. IC694M IC694MD IC694MDLDocument4 pagesGE Fanuc IC694MDL940: Output Module, Relay 2 Amp 16 Point, Non Isolated. IC694M IC694MD IC694MDLomarlgonzNo ratings yet
- 3rd Semester Lab 201Document36 pages3rd Semester Lab 201Noor HussainNo ratings yet
- 17-Ee6611 Power Electronics LabDocument79 pages17-Ee6611 Power Electronics Labvign3840No ratings yet
- LIC Lab ManualDocument89 pagesLIC Lab ManualTAMILAN XEROX VtmNo ratings yet
- Power Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuDocument50 pagesPower Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuhodeeesvcetNo ratings yet
- 19bee109d - Riya Chauhan - Pec Exp-1 To 10Document51 pages19bee109d - Riya Chauhan - Pec Exp-1 To 10Harshit SolankiNo ratings yet
- Regulated Power SupplyDocument19 pagesRegulated Power SupplyRonn Albert GabucayNo ratings yet
- Pec - Exp 1 To 10Document49 pagesPec - Exp 1 To 10Harshit SolankiNo ratings yet
- Small Size, Light Weight, Great Features, Best Value!: Blueplanet 2.0 TL1 - 3.0 TL1 4.0 TL1 - 5.0 TL1 Data SheetDocument3 pagesSmall Size, Light Weight, Great Features, Best Value!: Blueplanet 2.0 TL1 - 3.0 TL1 4.0 TL1 - 5.0 TL1 Data SheetYongki Adi Pratama PutraNo ratings yet
- Cycle 2Document28 pagesCycle 2gokulmpm2No ratings yet
- Ex5 (Ra2111003010611)Document15 pagesEx5 (Ra2111003010611)shubhamNo ratings yet
- DC MCCB Switch Disconnectors Ex9MSDDocument19 pagesDC MCCB Switch Disconnectors Ex9MSDMarkicNo ratings yet
- Power Electronics Lab PLC Lab 5th SemDocument76 pagesPower Electronics Lab PLC Lab 5th SemSEELAM NAGA DURGA SRINo ratings yet
- Lab2) Power-ElectronicsDocument42 pagesLab2) Power-ElectronicsMehmet DALNo ratings yet
- Clap Control IOT LightDocument5 pagesClap Control IOT LighttayzarlwintunNo ratings yet
- LIC Lab ManualDocument94 pagesLIC Lab Manualmamathasuvarna1121No ratings yet
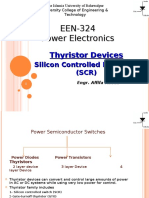
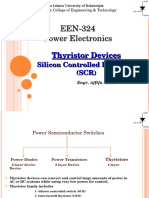
- EEN-324 Power ElectronicsDocument53 pagesEEN-324 Power ElectronicsTe NgNo ratings yet
- Exp1 - SCR IGBT and MOSFET CharacteristicsDocument24 pagesExp1 - SCR IGBT and MOSFET CharacteristicsAaaa DdddNo ratings yet
- Wireless RC Car With 3-AXIS Accelerometer Based ControllerDocument27 pagesWireless RC Car With 3-AXIS Accelerometer Based ControllerTanu JainNo ratings yet
- A Full-Bridge Phase-Shifted Inverter For Induction HeatingDocument78 pagesA Full-Bridge Phase-Shifted Inverter For Induction HeatingCCNo ratings yet
- DC To Pulse Width Modulator: Allows Very Eff Icient Control o FDC Motors, Heate Rs or LightsDocument0 pagesDC To Pulse Width Modulator: Allows Very Eff Icient Control o FDC Motors, Heate Rs or Lightsapostol_menNo ratings yet
- Experiment No. 8 A) Date: Single Phase Half Wave RectifierDocument25 pagesExperiment No. 8 A) Date: Single Phase Half Wave RectifierSAGAR CHAVAN (RA2111003010818)No ratings yet
- Chapter Four: Construction, Testing and ResultsDocument6 pagesChapter Four: Construction, Testing and ResultsNathaniel AdegheNo ratings yet
- Electronics Lab 2019Document37 pagesElectronics Lab 2019Noor HussainNo ratings yet
- Electronics Circuit Design LabDocument34 pagesElectronics Circuit Design Labsrvdhar100% (1)
- Sectos Product Brochure - EN - 140108Document28 pagesSectos Product Brochure - EN - 140108Mario EliasNo ratings yet
- Beee Exp 7Document8 pagesBeee Exp 7aman vermaNo ratings yet
- Power Semiconductor Switches: Power Diodes Power Transistors ThyristorsDocument46 pagesPower Semiconductor Switches: Power Diodes Power Transistors ThyristorsBilal HussainNo ratings yet
- S1F76610 Series CMOS DC/DC Converter (Voltage Doubler / Tripler) & Voltage RegulatorDocument14 pagesS1F76610 Series CMOS DC/DC Converter (Voltage Doubler / Tripler) & Voltage RegulatorAndyNo ratings yet
- Switch Yard & Protection SystemDocument48 pagesSwitch Yard & Protection SystemDharmendra GargNo ratings yet
- Best of Design Ideas - Volume 2Document18 pagesBest of Design Ideas - Volume 2ableseaman100% (3)
- Variable Power Supply With Digital ControlDocument15 pagesVariable Power Supply With Digital ControlSubhash Bajaj100% (1)
- Analog Circuits and Simulation LabDocument77 pagesAnalog Circuits and Simulation LableevasusanNo ratings yet
- Digital Axle Counter: Presented by Chandru.S Sse/Sig/SaDocument90 pagesDigital Axle Counter: Presented by Chandru.S Sse/Sig/Sakaarthik12No ratings yet
- STD3N62K3, STF3N62K3, Stu3n62k3Document27 pagesSTD3N62K3, STF3N62K3, Stu3n62k3David Alberto Lotero AlvarezNo ratings yet
- 2SB631,631K/2SD600,600K: 100V/120V, 1A Low-Frequency Power Amplifier ApplicationsDocument4 pages2SB631,631K/2SD600,600K: 100V/120V, 1A Low-Frequency Power Amplifier ApplicationsYunus Emre ErsanlıNo ratings yet
- 19-Full Wave Rectifier With Filter and Regulator+earth Resistance Measurement-20-12-2022Document3 pages19-Full Wave Rectifier With Filter and Regulator+earth Resistance Measurement-20-12-2022Zack ZackNo ratings yet
- EEN 324 Power ElectronicsDocument53 pagesEEN 324 Power ElectronicsJairo PadronNo ratings yet
- New ST70 Driver BoardDocument13 pagesNew ST70 Driver BoardSergio RiveroNo ratings yet
- NXP Homebrew RF Design Challenge MRF300AN & MRF300BN 144Mhz Linear AmplifierDocument4 pagesNXP Homebrew RF Design Challenge MRF300AN & MRF300BN 144Mhz Linear AmplifierAnonymous cEIJYBqClG100% (4)
- 6 A Prediction ProblemDocument31 pages6 A Prediction Problemhmpudur1968No ratings yet
- Power SpectDocument40 pagesPower Specthmpudur1968No ratings yet
- Multirate Digital Signal ProcessingDocument64 pagesMultirate Digital Signal Processingkishore_k777No ratings yet
- Asynchronous Sequential Circuit NotesDocument15 pagesAsynchronous Sequential Circuit Notessujaganesan200950% (2)
- VLSI Unit-IVDocument87 pagesVLSI Unit-IVUma Maheswari100% (2)
- Reflection Coefficients For Lattice RealizationDocument8 pagesReflection Coefficients For Lattice RealizationGirija VaniNo ratings yet
- MDSP 1Document48 pagesMDSP 1Soundarya SvsNo ratings yet
- Unit 4 VlsiDocument35 pagesUnit 4 Vlsihmpudur1968No ratings yet
- Ec6601 Vlsi DesignDocument58 pagesEc6601 Vlsi DesignRajiv SNo ratings yet
- BMIDocument1 pageBMIhmpudur1968No ratings yet
- Iir and Fir FilterDocument25 pagesIir and Fir Filterhmpudur1968No ratings yet
- Analysis of Clocked Sequential Circuits SynchronousDocument8 pagesAnalysis of Clocked Sequential Circuits Synchronouschahatsri2003No ratings yet
- AP 4153 Semiconductor Devices and ModelingDocument4 pagesAP 4153 Semiconductor Devices and Modelinghmpudur1968No ratings yet