You might also like
- EST ResumenDocument3 pagesEST ResumenAshNo ratings yet
- CME-2223 T1 IntrodDocument16 pagesCME-2223 T1 IntrodNuria Pla VallesNo ratings yet
- 1-DiAM Examen 2017Document5 pages1-DiAM Examen 2017IvanRosellAgustíNo ratings yet
- Examen Final Teoria 17 18Document5 pagesExamen Final Teoria 17 18Fineas GrozaNo ratings yet
- Teoría 3Document5 pagesTeoría 3marcodelarcoNo ratings yet
- Formulari Oleohidràulica Circuits de CADocument4 pagesFormulari Oleohidràulica Circuits de CAlucmirferNo ratings yet
- PRACTRI1 15 16 v1Document3 pagesPRACTRI1 15 16 v1Pol Martin VergésNo ratings yet
- 1 Introduccion PDFDocument82 pages1 Introduccion PDFJosé Luis García CubasNo ratings yet
- Resum Camps MagnèticsDocument4 pagesResum Camps MagnèticsjosefisasNo ratings yet
- Examen Parcial QT2122 SoluciąDocument4 pagesExamen Parcial QT2122 SoluciąMar VilaNo ratings yet
- Prova Avaluadora 03Document4 pagesProva Avaluadora 03Roger Martínez PardellNo ratings yet
- Memo PDFDocument1 pageMemo PDFMiguel Murciano CoboNo ratings yet
- Carta ILS SalvadorDocument1 pageCarta ILS SalvadorCélio LinharesNo ratings yet
- ET7b 09 10 Q1 PaperDocument8 pagesET7b 09 10 Q1 Paperrc7pablorNo ratings yet
- Camp Magnètic IIDocument14 pagesCamp Magnètic IIelenaperadlpNo ratings yet
- Teoria F2-UD4Document3 pagesTeoria F2-UD4Arnau PlanaNo ratings yet
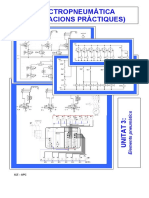
- Unitat 1 Electropneum TicaDocument7 pagesUnitat 1 Electropneum TicaMarc GordoNo ratings yet
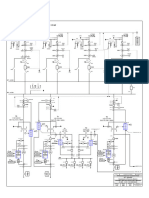
- Schema Monofilara SCURTU IONUT-GABRIELDocument1 pageSchema Monofilara SCURTU IONUT-GABRIELionelal44207No ratings yet
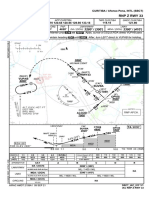
- SBTF RNP Rwy 33Document1 pageSBTF RNP Rwy 33azx72No ratings yet
- 3.3 Díodes D - Únio PNDocument2 pages3.3 Díodes D - Únio PNEsther Lozano RomeroNo ratings yet
- Unitat 7 Electropneum TicaDocument21 pagesUnitat 7 Electropneum Ticalluís llevatNo ratings yet
- Diagrama Unifilar Pym Dbc-115Document1 pageDiagrama Unifilar Pym Dbc-115Abel SilvaNo ratings yet
- Barrera de Hormigon 4Document1 pageBarrera de Hormigon 4instalaciones1asistenciasNo ratings yet
- SBCT Ils U or Loc U Cat I II Rwy 15 Iac 20220908Document1 pageSBCT Ils U or Loc U Cat I II Rwy 15 Iac 20220908junior a,oiNo ratings yet
- ELCTRICA 1fDocument1 pageELCTRICA 1fsandra paolaNo ratings yet
- Rectes Denisa Maria Mocan3Document1 pageRectes Denisa Maria Mocan3maria.deniseee0No ratings yet
- SBPV - Ils W or Loc W Rwy 19 - Iac - 20210225Document1 pageSBPV - Ils W or Loc W Rwy 19 - Iac - 20210225João Pedro Santos da CruzNo ratings yet
- SBSR Rnp-Rwy-25 Iac 20221201Document1 pageSBSR Rnp-Rwy-25 Iac 20221201Valiense FilmesNo ratings yet
- 03a - Casos ParticularsDocument13 pages03a - Casos ParticularsDaniel Trias MansillaNo ratings yet
- FOR Mat 313Document3 pagesFOR Mat 313LNo ratings yet
- U2 Relatran Palanques CorriolesDocument6 pagesU2 Relatran Palanques CorriolesegarciaNo ratings yet
- Wuolah Free Practica 4CMDocument9 pagesWuolah Free Practica 4CMhdsavasgamingNo ratings yet
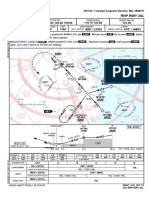
- Sbbe Rnp-Rwy-24 Iac 20211202Document1 pageSbbe Rnp-Rwy-24 Iac 20211202Luiz SantosNo ratings yet
- Analisis 2 Vigas Metodo MatricialDocument1 pageAnalisis 2 Vigas Metodo MatricialMisael BustamanteNo ratings yet
- Joc Escacs Ismael BorjaDocument8 pagesJoc Escacs Ismael BorjaOneil Macias MoraNo ratings yet
- SBDN Rnp-Rwy-12 Iac 20221229Document1 pageSBDN Rnp-Rwy-12 Iac 20221229TI PIRESNo ratings yet
- SBCT - RNP Z Rwy 33 - Iac - 20211007Document1 pageSBCT - RNP Z Rwy 33 - Iac - 20211007Paulo SilvaNo ratings yet
- SBTV Rnp-Rwy-15 Iac 20211202Document1 pageSBTV Rnp-Rwy-15 Iac 20211202alastair kenwayNo ratings yet
- Unitat 3Document26 pagesUnitat 3Sergio KastNo ratings yet
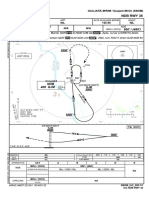
- SBGM NDB Rwy 35Document1 pageSBGM NDB Rwy 35azx72No ratings yet
- Formular IDocument2 pagesFormular IExperlSalmón100% (1)
- Ilovepdf MergedDocument16 pagesIlovepdf MergedYerfri GonzalezNo ratings yet
- 1 MergedDocument10 pages1 MergedYerfri GonzalezNo ratings yet
- CampDocument32 pagesCampPedro Gomez RochNo ratings yet
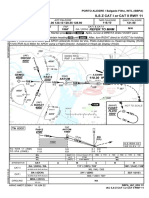
- Sbpa - Ils Z Cat I or Cat II Rwy 11 - Iac - 20220616Document1 pageSbpa - Ils Z Cat I or Cat II Rwy 11 - Iac - 20220616Rodrigo SchneiderNo ratings yet
- Agl II ClaseDocument33 pagesAgl II ClaseCarla Mas SobrinoNo ratings yet
- SBGR Rnp-X-Rwy-27l Iac 20210520Document1 pageSBGR Rnp-X-Rwy-27l Iac 20210520Roberto Nascimento Maia GomesNo ratings yet
- Distributie Energie in Casa - v0Document1 pageDistributie Energie in Casa - v0marianpcbNo ratings yet
- Unitat 2Document14 pagesUnitat 2Sergio KastNo ratings yet
- Practica 1 Canales - 20220905 - 0001Document8 pagesPractica 1 Canales - 20220905 - 0001Ebed Melec Quispe CalleNo ratings yet
- Orar Fie 2023-24 Sem2 An IIDocument1 pageOrar Fie 2023-24 Sem2 An IIdariusNo ratings yet
- P01 FSMDocument16 pagesP01 FSMIsabel BlancoNo ratings yet
- 151 Principis Fonamentals Ex02pDocument1 page151 Principis Fonamentals Ex02pDesirée ÁlvarezNo ratings yet
- Enunciat Pràctica 11. Activitat Presencial - 1Document1 pageEnunciat Pràctica 11. Activitat Presencial - 1mcramgamerNo ratings yet
- Formulari Sistemes Fora EquilibriDocument2 pagesFormulari Sistemes Fora EquilibriLluís TorresNo ratings yet
- Formulari Electricitat RevrevDocument2 pagesFormulari Electricitat RevrevGemmaCollV35No ratings yet
- SBNT Rnp-Rwy-34l Iac 20220224Document1 pageSBNT Rnp-Rwy-34l Iac 20220224Alastair DackNo ratings yet
- Sbpa - Iac Ils V Rwy 11 - Iac - 20171012Document1 pageSbpa - Iac Ils V Rwy 11 - Iac - 20171012Fabricio SoaresNo ratings yet
- Sbip Rnp-Z-Rwy-05 Iac 20210128Document1 pageSbip Rnp-Z-Rwy-05 Iac 20210128gmthiesenNo ratings yet
- Treball AssignaturaDocument1 pageTreball AssignaturaRoger SanclementeNo ratings yet
- Pràctica 3-2Document5 pagesPràctica 3-2Roger SanclementeNo ratings yet
- Termo TreballDocument35 pagesTermo TreballRoger SanclementeNo ratings yet
- Classe 5 Taylor I ExtremsDocument12 pagesClasse 5 Taylor I ExtremsRoger SanclementeNo ratings yet
- Representació NormalitzadaDocument11 pagesRepresentació NormalitzadaRoger SanclementeNo ratings yet
- Examen SistMec 16-17 Modul 3 4-PR - V3resoltDocument6 pagesExamen SistMec 16-17 Modul 3 4-PR - V3resoltRoger SanclementeNo ratings yet
- CV Roger Sanclemente MoralDocument1 pageCV Roger Sanclemente MoralRoger SanclementeNo ratings yet
- Índex Pla de MKTDocument3 pagesÍndex Pla de MKTRoger SanclementeNo ratings yet
- Ex Resolt TermoFonamental2020GenerDocument17 pagesEx Resolt TermoFonamental2020GenerRoger SanclementeNo ratings yet
- Partb P1 Gener2021 Def - Online - SolDocument1 pagePartb P1 Gener2021 Def - Online - SolRoger SanclementeNo ratings yet
- Test Ex Fina Gener - 2021 DEF - Sol - OnlineDocument1 pageTest Ex Fina Gener - 2021 DEF - Sol - OnlineRoger SanclementeNo ratings yet
- Pràctica 3 MecanisesDocument7 pagesPràctica 3 MecanisesRoger SanclementeNo ratings yet
- Examen Exemple TM5-3Document3 pagesExamen Exemple TM5-3Roger SanclementeNo ratings yet
- PRACTICA VIIB CovidDocument7 pagesPRACTICA VIIB CovidRoger SanclementeNo ratings yet
- Ex15 I 16 AbcDocument2 pagesEx15 I 16 AbcRoger SanclementeNo ratings yet
- CONVERSEDocument10 pagesCONVERSERoger SanclementeNo ratings yet
- Activitat 1 (Esquematització de Mecanismes)Document1 pageActivitat 1 (Esquematització de Mecanismes)Roger SanclementeNo ratings yet
- P 1Document1 pageP 1Roger SanclementeNo ratings yet
- Tema 3 2n Principi de la Termodinàmica: Q = γ P V VDocument5 pagesTema 3 2n Principi de la Termodinàmica: Q = γ P V VRoger SanclementeNo ratings yet