You might also like
- White Lies - Core RulebookDocument136 pagesWhite Lies - Core RulebookThiago AlmeidaNo ratings yet
- Fitness RX For Women - December 2013Document124 pagesFitness RX For Women - December 2013renrmrm100% (2)
- SVT GreskeDocument17 pagesSVT GreskePeter100% (6)
- 3512 Throttle Position Error 91-8Document13 pages3512 Throttle Position Error 91-8harikrishnanpd3327100% (3)
- Assignment in English Plus Core 11 Full CircleDocument76 pagesAssignment in English Plus Core 11 Full CircleRitu Maan68% (38)
- PAForge D20 Weapons CompendiumDocument29 pagesPAForge D20 Weapons Compendiumdjbonefish100% (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- RE5R05A Overview 2007 - 1 - 12Document4 pagesRE5R05A Overview 2007 - 1 - 12Chee Bai100% (6)
- Sprinter MY2020 Fuse SupplementDocument20 pagesSprinter MY2020 Fuse SupplementmausingerNo ratings yet
- Still r70Document86 pagesStill r70mateiola83% (35)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- EE208 Lab ManualDocument38 pagesEE208 Lab Manualsakib shaukatNo ratings yet
- Actual Freedom - Made Easy (Print Friendly Edition)Document186 pagesActual Freedom - Made Easy (Print Friendly Edition)Justine100% (5)
- Rensselaer Polytechnic Institute ECSE-4760 Real-Time Applications in Control & Communications ANALOG AND DIGITAL CONTROL OF A DC MOTORDocument23 pagesRensselaer Polytechnic Institute ECSE-4760 Real-Time Applications in Control & Communications ANALOG AND DIGITAL CONTROL OF A DC MOTORsara_ogl7No ratings yet
- Analog Layout Design (Industrial Training)Document10 pagesAnalog Layout Design (Industrial Training)Shivaksh SharmaNo ratings yet
- 3rd Periodic Test in English4Document7 pages3rd Periodic Test in English4Santa Dela Cruz Naluz100% (1)
- Modatek Level 2 Robot Training Course OverviewDocument166 pagesModatek Level 2 Robot Training Course OverviewIvan Paul Medellin CastroNo ratings yet
- MID 039 - CID 1847 - FMI 09: Pantalla AnteriorDocument6 pagesMID 039 - CID 1847 - FMI 09: Pantalla AnteriorWalterNo ratings yet
- Vag Immo Emulator Schematics V.1: CX: 10ufDocument5 pagesVag Immo Emulator Schematics V.1: CX: 10ufwilliamrojasmendozaNo ratings yet
- Codigo 0070-02 de D6N AkmDocument5 pagesCodigo 0070-02 de D6N AkmMiguel LopezNo ratings yet
- Implement elevator controller using microcontrollerDocument38 pagesImplement elevator controller using microcontrollerRajesh Aaitha100% (2)
- Tau k205m Boomgate ManualDocument11 pagesTau k205m Boomgate ManualPenta GuardNo ratings yet
- Intake and Exhaust Manifolds Emission Control SystemDocument47 pagesIntake and Exhaust Manifolds Emission Control SystemGreg HannaNo ratings yet
- Traffic Control System Using 89C51: Project TitleDocument27 pagesTraffic Control System Using 89C51: Project TitleHafza GhafoorNo ratings yet
- UntitledDocument20 pagesUntitledJuanma DoceNo ratings yet
- Railway Gate Control ProjectDocument42 pagesRailway Gate Control ProjectTathagataNo ratings yet
- Automatic Power Factor Controller Using MicrocontrollerDocument29 pagesAutomatic Power Factor Controller Using Microcontrollervallery1100% (3)
- Unit-V 8051 Microcontroller Applications by S.Sayeekumar, AP/RMDEEEDocument43 pagesUnit-V 8051 Microcontroller Applications by S.Sayeekumar, AP/RMDEEEKiran NeogNo ratings yet
- CNC Interface Board CM101 ManualDocument17 pagesCNC Interface Board CM101 ManualZorica SolunacNo ratings yet
- Fast automatic sizing of charge pump phase-locked loop based on behavioral modelsDocument22 pagesFast automatic sizing of charge pump phase-locked loop based on behavioral modelsGc VeereshNo ratings yet
- 3UF5 SIMOCODE-DP System Motor Protection and Control DeviceDocument20 pages3UF5 SIMOCODE-DP System Motor Protection and Control DeviceKamal TomarNo ratings yet
- DCS Interview QuestionDocument8 pagesDCS Interview QuestionZulhelmiNo ratings yet
- Fault Codes Cat 12 PDFDocument1 pageFault Codes Cat 12 PDFCarlosNo ratings yet
- ABB SPEM RelayDocument12 pagesABB SPEM Relaysiva_984No ratings yet
- Commissioning Protocol Stacker ReclaimerDocument2 pagesCommissioning Protocol Stacker ReclaimerSagar G ReddyNo ratings yet
- Smart Parking System: A Major Project ReportDocument62 pagesSmart Parking System: A Major Project ReportNikhil RastogiNo ratings yet
- HHP Loco Driver GuideDocument63 pagesHHP Loco Driver GuideDevidatta Satapathy83% (6)
- LT9 Manual Mimoinsa KS1 M6 - Rev01 - inDocument19 pagesLT9 Manual Mimoinsa KS1 M6 - Rev01 - inRezhaNugrahaNo ratings yet
- V.C.U (Vehicle Control Unit) PDFDocument5 pagesV.C.U (Vehicle Control Unit) PDFrahul kNo ratings yet
- PLC QuestionDocument14 pagesPLC QuestionWaseem AhmadNo ratings yet
- FlowCAD An PSpice AutoConvergenceDocument10 pagesFlowCAD An PSpice AutoConvergenceSirish OrugantiNo ratings yet
- ConverterUnit 56426Document2 pagesConverterUnit 56426Carlo GomezNo ratings yet
- MID 039 - CID 1847 - FMI 02: Pantalla AnteriorDocument4 pagesMID 039 - CID 1847 - FMI 02: Pantalla AnteriorWalterNo ratings yet
- DCS Interview QuestionsDocument5 pagesDCS Interview QuestionsHardik MantriNo ratings yet
- Notes: Cam Operated Rotary Switches Cam Operated Rotary SwitchesDocument16 pagesNotes: Cam Operated Rotary Switches Cam Operated Rotary Switchesatanumaster1987No ratings yet
- Guest KlnitDocument42 pagesGuest KlnitmohanNo ratings yet
- Micro 133 Midterm Lecture 2 - IO Interfacing With 8255 & Assembly Language - EditedDocument10 pagesMicro 133 Midterm Lecture 2 - IO Interfacing With 8255 & Assembly Language - EditedKeilla Romabiles LeopandoNo ratings yet
- Unit8-RK 3Document27 pagesUnit8-RK 3sbaNo ratings yet
- GAL16V8: Features Functional Block DiagramDocument22 pagesGAL16V8: Features Functional Block DiagramLharchichi AnissNo ratings yet
- Mercedes-Benz-Sprinter 2021 EN Manual de Taller Diagrama de Fusibles 9067fe22cbDocument18 pagesMercedes-Benz-Sprinter 2021 EN Manual de Taller Diagrama de Fusibles 9067fe22cbOwuell leonardo BelmonteNo ratings yet
- EMTP-RV Nuclear Power Plant StudiesDocument20 pagesEMTP-RV Nuclear Power Plant StudiesAnonymous zfmlsb2GjANo ratings yet
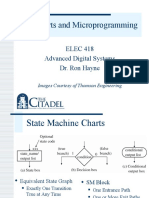
- SM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron HayneDocument38 pagesSM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron Hayneashwani22No ratings yet
- GAL16V8: Features Functional Block DiagramDocument23 pagesGAL16V8: Features Functional Block DiagramWilmar Diaz RodriguezNo ratings yet
- DC Motor Speed Control Part I: Open-Loop CommandDocument5 pagesDC Motor Speed Control Part I: Open-Loop CommandEbd RahmanNo ratings yet
- BN 180 AutroKeeper PDFDocument2 pagesBN 180 AutroKeeper PDFMOHD HAIDARNo ratings yet
- Eocr Total enDocument38 pagesEocr Total enArturo SanchezNo ratings yet
- DC Motor Speed ControlDocument7 pagesDC Motor Speed ControlBiyadglgne Eskezia AyalewNo ratings yet
- 120H Sens Ouput Transm Caf 4Document4 pages120H Sens Ouput Transm Caf 4Miguel Angel Garrido CardenasNo ratings yet
- Effective Study MaterialDocument74 pagesEffective Study MaterialSanthosh AnantharamanNo ratings yet
- Network Cable Tester: User Operation ManualDocument15 pagesNetwork Cable Tester: User Operation Manualsebibv2No ratings yet
- Review The General Troubleshooting Information: Report A Problem With This ArticleDocument4 pagesReview The General Troubleshooting Information: Report A Problem With This ArticleDio ArkanaNo ratings yet
- GSM Robotic ArmDocument68 pagesGSM Robotic ArmParveen KumarNo ratings yet
- ES Lab FileDocument37 pagesES Lab FileMøhït JáñgírNo ratings yet
- Stepper Motor Control Using 8051Document7 pagesStepper Motor Control Using 8051hksaifee100% (1)
- 10 SEP671 REL670 Exercise 9 Autorecloser and 1-3 Phase OperationsDocument15 pages10 SEP671 REL670 Exercise 9 Autorecloser and 1-3 Phase OperationsMessias De Oliveira SantosNo ratings yet
- Ceiling Fans Sensa Series: F Yuragi Function (Natural Breeze)Document1 pageCeiling Fans Sensa Series: F Yuragi Function (Natural Breeze)TYNo ratings yet
- Tugas Bahasa Inggris-1Document8 pagesTugas Bahasa Inggris-1Nur KomariyahNo ratings yet
- Lab ReportDocument9 pagesLab ReportQi Yi TanNo ratings yet
- Fundamental aim training routines and benchmarksDocument8 pagesFundamental aim training routines and benchmarksAchilles SeventySevenNo ratings yet
- Fundamental Calculations To Convert Intensities Into Concentrations in Optical Emission Spectrochemical AnalysisDocument14 pagesFundamental Calculations To Convert Intensities Into Concentrations in Optical Emission Spectrochemical AnalysisPYDNo ratings yet
- ON Code (Aci 318-77) : Commentary Building Requirements For Reinforced ConcreteDocument132 pagesON Code (Aci 318-77) : Commentary Building Requirements For Reinforced ConcreteAzmi BazazouNo ratings yet
- Commsec - Co Profile - 20150521Document14 pagesCommsec - Co Profile - 20150521Muhammad Nisar KhanNo ratings yet
- Estimation of Fabric Opacity by ScannerDocument7 pagesEstimation of Fabric Opacity by ScannerJatiKrismanadiNo ratings yet
- What Is The Kingdom of GodDocument10 pagesWhat Is The Kingdom of GodSunil ChelladuraiNo ratings yet
- David Lawrence CVDocument32 pagesDavid Lawrence CVM.Awais AkhterNo ratings yet
- Service Manual: Freestanding Cooling Double Door ARC 2140Document5 pagesService Manual: Freestanding Cooling Double Door ARC 2140Sergio ZapataNo ratings yet
- Guess The Animal!: ModelDocument2 pagesGuess The Animal!: ModelGiovanni Vilcapoma LauraNo ratings yet
- 3 Soal Ganjil Inggris MaritimDocument8 pages3 Soal Ganjil Inggris MaritimFikri Mu'izNo ratings yet
- Solar Collectors Final WordDocument14 pagesSolar Collectors Final WordVaibhav Vithoba NaikNo ratings yet
- CHAPT 12a PDFDocument2 pagesCHAPT 12a PDFindocode100% (1)
- Rate Constant Determination 2Document8 pagesRate Constant Determination 2Divya UpadhyayNo ratings yet
- Tutorial - DGA AnalysisDocument17 pagesTutorial - DGA Analysisw automationNo ratings yet
- Rites of Acceptance For Altar Servers PDFDocument3 pagesRites of Acceptance For Altar Servers PDFJohn Carl Aparicio100% (1)
- IRIScan Book Executive 3 PDFDocument86 pagesIRIScan Book Executive 3 PDFssamplingNo ratings yet
- Marketing 5 0Document23 pagesMarketing 5 0gmusicestudioNo ratings yet
- Rotating Sharp Shooting Multi Target Mechanism Improves Military AimDocument13 pagesRotating Sharp Shooting Multi Target Mechanism Improves Military AimVishal GNo ratings yet
- Waste Management in Vienna. MA 48Document12 pagesWaste Management in Vienna. MA 484rtttt4ttt44No ratings yet
- Mvf404 Mhn-Seh2000w 956 b4 SiDocument2 pagesMvf404 Mhn-Seh2000w 956 b4 SiluisneiralopezNo ratings yet