You might also like
- Triumph Spitfire MK4 - 1500Document108 pagesTriumph Spitfire MK4 - 1500Ricardo100% (1)
- ICT Forex Trading NotesDocument110 pagesICT Forex Trading NotesLavier Trinta e Sete100% (4)
- Bulk Solids HandlingDocument303 pagesBulk Solids HandlingDr_M_Soliman100% (12)
- This Homework Is Due On Wednesday, February 19, 2020, at 11:59PM. Self-Grades Are Due On Monday, February 24, 2019, at 11:59PM. 1 Complex NumbersDocument18 pagesThis Homework Is Due On Wednesday, February 19, 2020, at 11:59PM. Self-Grades Are Due On Monday, February 24, 2019, at 11:59PM. 1 Complex NumbersBella ZionNo ratings yet
- Sessional-Ii Exams (Paper+solution)Document5 pagesSessional-Ii Exams (Paper+solution)Sohaib IrfanNo ratings yet
- DES-3611.prepaway - Premium.exam.65q: Number: DES-3611 Passing Score: 800 Time Limit: 120 Min File Version: 1.1Document22 pagesDES-3611.prepaway - Premium.exam.65q: Number: DES-3611 Passing Score: 800 Time Limit: 120 Min File Version: 1.1Emre Halit POLATNo ratings yet
- TRAIN Briefing - Revised Personal Income Tax RatesDocument73 pagesTRAIN Briefing - Revised Personal Income Tax RatesElizaFaithEcleoNo ratings yet
- Chapterwise Formula-1Document3 pagesChapterwise Formula-1tunio.bscsf21No ratings yet
- Set 18 Solution ReviewedDocument14 pagesSet 18 Solution ReviewedMuhammad SuleetNo ratings yet
- Project Report On Extended Finite Element Methods: Submitted ToDocument24 pagesProject Report On Extended Finite Element Methods: Submitted TogauravbmcNo ratings yet
- Final Exam-2018Document3 pagesFinal Exam-2018혁준No ratings yet
- 5 FEA CADDocument12 pages5 FEA CADMohamed AbdelazizNo ratings yet
- Review Notes in Plane Trigonometry Functions of A Right Triangle (SOH-CAH-TOA)Document7 pagesReview Notes in Plane Trigonometry Functions of A Right Triangle (SOH-CAH-TOA)속강대No ratings yet
- Final Exam-2020Document3 pagesFinal Exam-2020혁준No ratings yet
- g ( x) = 3 x 2 + 12 x + 9Document8 pagesg ( x) = 3 x 2 + 12 x + 9kashvina paramjothyNo ratings yet
- Degree_Formula_Sheet (1)Document5 pagesDegree_Formula_Sheet (1)Hai Liang OngNo ratings yet
- Chapter 5Document48 pagesChapter 5VITHYAA RUHBINI GUNARAJANNo ratings yet
- HMW1 PDFDocument11 pagesHMW1 PDFeduardolarangeiraNo ratings yet
- Math 121 - Integration FormulasDocument8 pagesMath 121 - Integration FormulasJazperNo ratings yet
- Elementos de Física 2019 - 2020 FormulárioDocument2 pagesElementos de Física 2019 - 2020 FormulárioTeresa GranjeiaNo ratings yet
- Complex Variables and Numerical Methods - BTech Mechanical Engineering Notes, Ebook PDFDocument92 pagesComplex Variables and Numerical Methods - BTech Mechanical Engineering Notes, Ebook PDFGAHRA RAJDEEP SINGHNo ratings yet
- LECTURE 1 Revised 2 10122020Document5 pagesLECTURE 1 Revised 2 10122020Joy Rianne HoriqueNo ratings yet
- Quantum Chemistry - Solution Set 1Document8 pagesQuantum Chemistry - Solution Set 1mozNo ratings yet
- Analysis of Suspension Bridge Chapter 0 Parabola CableDocument7 pagesAnalysis of Suspension Bridge Chapter 0 Parabola CableSeungWoo LEENo ratings yet
- Tutorial 4 SolutionsDocument10 pagesTutorial 4 Solutionssama abd elgelilNo ratings yet
- Chapter8s 1-UnlockedDocument19 pagesChapter8s 1-Unlockedjohn wallaceNo ratings yet
- Inverted pendulum - A system with innumerable applicationsDocument12 pagesInverted pendulum - A system with innumerable applicationsMattia PolgaNo ratings yet
- Senior Secondary Set 4: Solved Problems in Logarithms, Functions and SeriesDocument14 pagesSenior Secondary Set 4: Solved Problems in Logarithms, Functions and Seriesf l u f f yNo ratings yet
- Assignment For Machine Design 2018 - 2020 Batch: 1 Sin Cos 0 Sin Cos 0Document5 pagesAssignment For Machine Design 2018 - 2020 Batch: 1 Sin Cos 0 Sin Cos 0prasobhaNo ratings yet
- Document 6Document1 pageDocument 6MUHAMMAD NUR AMNI KHARIMANNo ratings yet
- HW#2 Ee370Document7 pagesHW#2 Ee370Ahmed Al-SarawiNo ratings yet
- Math 264 - Fall 2021 - Test 1 ReviewDocument2 pagesMath 264 - Fall 2021 - Test 1 ReviewHana BerhanuNo ratings yet
- Final 20 21iDocument9 pagesFinal 20 21ialikhalidd23No ratings yet
- More On Functions 2 REDONE 2022Document11 pagesMore On Functions 2 REDONE 2022Lazy BanditNo ratings yet
- EcE 224 Lab Act 1Document8 pagesEcE 224 Lab Act 1Jovel Jhon OpianaNo ratings yet
- Cal 1,2Document10 pagesCal 1,2조민성No ratings yet
- ch7Document16 pagesch7abjikm650No ratings yet
- Formula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Document4 pagesFormula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Zain AhmedNo ratings yet
- Universidad Nacional de Ingeniería: Sistemas de Control I (EE-647O)Document2 pagesUniversidad Nacional de Ingeniería: Sistemas de Control I (EE-647O)Jhonathan C LNo ratings yet
- Universidad Nacional de San Agustín Escuela Profesional de Ciencia de La ComputaciónDocument7 pagesUniversidad Nacional de San Agustín Escuela Profesional de Ciencia de La ComputaciónJonathan CuevaNo ratings yet
- Integral Calculus 15 16 20Document6 pagesIntegral Calculus 15 16 20Sharmaine FajutaganaNo ratings yet
- CF 6Document7 pagesCF 6Ali RajaNo ratings yet
- Homework Diff 5Document12 pagesHomework Diff 5Kking ChungNo ratings yet
- State Space Control of Systems TutorialDocument15 pagesState Space Control of Systems TutorialnestorNo ratings yet
- Exam Solution: Zsin ( )Document2 pagesExam Solution: Zsin ( )uipohlklgfNo ratings yet
- Lecture 01 - Review of FundamentalsDocument6 pagesLecture 01 - Review of FundamentalsCaden LeeNo ratings yet
- EEC325 Chapter 1 1 1Document13 pagesEEC325 Chapter 1 1 1Bashir Abubakar AlkasimNo ratings yet
- Tangent Line and The DerivativesDocument10 pagesTangent Line and The DerivativesandreaNo ratings yet
- Unit-II - (Vector Integration - New)Document26 pagesUnit-II - (Vector Integration - New)Sunay B SNo ratings yet
- Chap 9 Simple Harmonic Motion SummaryDocument2 pagesChap 9 Simple Harmonic Motion SummarySyakirah MunirNo ratings yet
- Formulario CálculoDocument2 pagesFormulario CálculoYansi Nahomy Aguilar CruzNo ratings yet
- Integration of PowersDocument2 pagesIntegration of PowersRoan PariñasNo ratings yet
- Tut 6 SolDocument9 pagesTut 6 Solsama abd elgelilNo ratings yet
- 4 Analog ComputerDocument13 pages4 Analog Computerwilly.irianto26No ratings yet
- EndSem Jan2021Document2 pagesEndSem Jan2021Nithishkumar BaskerNo ratings yet
- Equation Appendix Final ExamDocument5 pagesEquation Appendix Final ExamDhanush raoNo ratings yet
- 3.1 The Double Integral and Rectangular RegionsDocument8 pages3.1 The Double Integral and Rectangular Regionsshamarplummer0923No ratings yet
- CHAPTER 3 - Laplace Transforms (2B) (1)Document7 pagesCHAPTER 3 - Laplace Transforms (2B) (1)Camille SalmasanNo ratings yet
- Deflection of Beams Exercise Sheet SolutionsDocument15 pagesDeflection of Beams Exercise Sheet Solutions周暐凱No ratings yet
- MS2019Document2 pagesMS2019herewego759No ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Etextbook 978 0078025884 Accounting Information Systems 4th EditionDocument61 pagesEtextbook 978 0078025884 Accounting Information Systems 4th Editionmark.dame383100% (49)
- Piano Sonata No. 17 Tempest 1. Largo - AllegroDocument10 pagesPiano Sonata No. 17 Tempest 1. Largo - AllegroOtrebor ImlesNo ratings yet
- Zara Marketing Mix Four PsDocument3 pagesZara Marketing Mix Four PsHaniyeh ShojaeiNo ratings yet
- National Electrification Administration Vs GonzagaDocument1 pageNational Electrification Administration Vs GonzagaDonna Amethyst BernardoNo ratings yet
- Manual Flowpet 5GDocument56 pagesManual Flowpet 5GRahkmat DanizarNo ratings yet
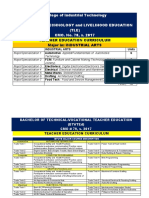
- College of Industrial Technology Bachelor of Technology and Livelihood Education (TLE) CMO. No. 78, S. 2017Document5 pagesCollege of Industrial Technology Bachelor of Technology and Livelihood Education (TLE) CMO. No. 78, S. 2017Industrial TechnologyNo ratings yet
- Differendial Pressure Flow MetersDocument1 pageDifferendial Pressure Flow Metersborn2engineerNo ratings yet
- Introduction To Major Crop FieldsDocument32 pagesIntroduction To Major Crop FieldsCHANDANINo ratings yet
- HSD (1) .Product - Spec.sheet BootstrapReserviorDocument2 pagesHSD (1) .Product - Spec.sheet BootstrapReserviorJay R SVNo ratings yet
- Shrimp Aquaculture in Sarangani BayDocument5 pagesShrimp Aquaculture in Sarangani BayronanvillagonzaloNo ratings yet
- Indian Pharmaceutical Industry: The Changing Dynamics: April 2016Document26 pagesIndian Pharmaceutical Industry: The Changing Dynamics: April 2016payal joshiNo ratings yet
- To Register Your IGP Please Visit or Scan The QR Code Below To Register Your IGP Please Visit or Scan The QR Code BelowDocument1 pageTo Register Your IGP Please Visit or Scan The QR Code Below To Register Your IGP Please Visit or Scan The QR Code BelowLester Jao SegubanNo ratings yet
- MCMT 2 eDocument461 pagesMCMT 2 eRonNo ratings yet
- 03board of Directors Resolution For AGRONetBIZ ENGLISHDocument1 page03board of Directors Resolution For AGRONetBIZ ENGLISHyuswirdaNo ratings yet
- HACCP Plan With Flow Chart-1Document23 pagesHACCP Plan With Flow Chart-1Anonymous aZA07k8TXfNo ratings yet
- EY - NASSCOM - M&A Trends and Outlook - Technology Services VF - 0Document35 pagesEY - NASSCOM - M&A Trends and Outlook - Technology Services VF - 0Tejas JosephNo ratings yet
- Trace Log 20131229152625Document3 pagesTrace Log 20131229152625Razvan PaleaNo ratings yet
- Consideration PropDocument2 pagesConsideration PropQasim GorayaNo ratings yet
- Data Protection Act (DPA)Document14 pagesData Protection Act (DPA)Crypto SavageNo ratings yet
- ED621826Document56 pagesED621826A. MagnoNo ratings yet
- Accounting for Business CombinationsDocument52 pagesAccounting for Business CombinationsEliza BethNo ratings yet
- SatconDocument18 pagesSatconBADRI VENKATESHNo ratings yet
- Design of Anchor Bolts Embedded in MasonryDocument6 pagesDesign of Anchor Bolts Embedded in MasonryAnonymous DJrec2No ratings yet
- High-Energy Fuels For Cruise MissilesDocument4 pagesHigh-Energy Fuels For Cruise Missilesgrindormh53No ratings yet
- Government's Role in Public HealthDocument2 pagesGovernment's Role in Public Healthmrskiller patchNo ratings yet