You might also like
- Fault Code 241 Vehicle Speed Sensor Circuit - Data Erratic, Intermittent or IncorrectDocument14 pagesFault Code 241 Vehicle Speed Sensor Circuit - Data Erratic, Intermittent or IncorrectAhmedmah100% (1)
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
- Welding Machines Schedule of LoadsDocument2 pagesWelding Machines Schedule of LoadsRamled Rerref91% (11)
- Internship ReportDocument62 pagesInternship ReportNITHIN R PNo ratings yet
- Samsung Ue65ks9000t Chassis Uwq60 Suhd TVDocument92 pagesSamsung Ue65ks9000t Chassis Uwq60 Suhd TVkevinalleinNo ratings yet
- Optimizing Solar Panel Tilt Using Machine Learning TechniquesDocument6 pagesOptimizing Solar Panel Tilt Using Machine Learning TechniquesHabiba HassanNo ratings yet
- Journal IEEEDocument5 pagesJournal IEEEvetrivelkishore82No ratings yet
- Power Quality Issues and Their Mitigation Techniques in Grid Tied Solar Photovoltaic Systems-A ReviewDocument6 pagesPower Quality Issues and Their Mitigation Techniques in Grid Tied Solar Photovoltaic Systems-A ReviewDaniyalNo ratings yet
- Asymmetrical Three-Phase Multilevel Inverter For Grid-Integrated PLL-Less SystemDocument7 pagesAsymmetrical Three-Phase Multilevel Inverter For Grid-Integrated PLL-Less Systemhamidamza4No ratings yet
- Dynamic Wireless Charging System For Electric Vehicles Based On Ultra-Capacitor Integrated Magnetic Resonance CouplingDocument6 pagesDynamic Wireless Charging System For Electric Vehicles Based On Ultra-Capacitor Integrated Magnetic Resonance CouplingjogeshNo ratings yet
- Emft Vik4Document6 pagesEmft Vik4Vikram SinghNo ratings yet
- An Efficient Scheduling Scheme For Plug-In Electric VehiclesDocument6 pagesAn Efficient Scheduling Scheme For Plug-In Electric Vehiclesa182280No ratings yet
- 10 2021 12-Performance Analysis of PV System With Quasi Z-Source Switched Inductor Capacitor Voltage Gain ConverterDocument4 pages10 2021 12-Performance Analysis of PV System With Quasi Z-Source Switched Inductor Capacitor Voltage Gain ConverterSai RameshNo ratings yet
- A Comparison Among Lithium-Ion Nickel-Cadmium Amp Nickel-Metal-Hydride Batteries For Charging and Discharging in Electric Vehicle by Bidirectional DC-DC ConverterDocument8 pagesA Comparison Among Lithium-Ion Nickel-Cadmium Amp Nickel-Metal-Hydride Batteries For Charging and Discharging in Electric Vehicle by Bidirectional DC-DC ConverterM.KeerthisriNo ratings yet
- Dynamic Operation of AC Micro-Grid Integrated PV-BESS Using 3-Phase97-Level CHBMLIDocument7 pagesDynamic Operation of AC Micro-Grid Integrated PV-BESS Using 3-Phase97-Level CHBMLIhamidamza4No ratings yet
- A New Triswitching Double Duty High Voltage Gain Boost Converter For DC Nanogrid ApplicationDocument7 pagesA New Triswitching Double Duty High Voltage Gain Boost Converter For DC Nanogrid ApplicationAQEEL ANWARNo ratings yet
- Project Report (Batch 4)Document43 pagesProject Report (Batch 4)deenaNo ratings yet
- Design and Analysis of High Performance of A BLDC Motor For Electric VehicleDocument4 pagesDesign and Analysis of High Performance of A BLDC Motor For Electric VehicleShubhzsNo ratings yet
- Inverse Time Overcurrent Relaying Decision For Protection of Three Phase Transmission LineDocument5 pagesInverse Time Overcurrent Relaying Decision For Protection of Three Phase Transmission LineNandi ?No ratings yet
- Solar-Powered EV DC Fast Charging Station Based On MPPT-Buck Converter Design Using PSO Trained NN Algorithm and MPCDocument7 pagesSolar-Powered EV DC Fast Charging Station Based On MPPT-Buck Converter Design Using PSO Trained NN Algorithm and MPCsurya kNo ratings yet
- Major Prject Report Group 7Document27 pagesMajor Prject Report Group 7AdityaNo ratings yet
- A New Multi-Input DC-DC Converter Integrated MPPT System For Hybrid Renewable Energy and Battery StorageDocument6 pagesA New Multi-Input DC-DC Converter Integrated MPPT System For Hybrid Renewable Energy and Battery StoragesankarNo ratings yet
- Solar Photo Voltaic Based Water Pumping Using BLDC MotorDocument5 pagesSolar Photo Voltaic Based Water Pumping Using BLDC MotorDhinu LalNo ratings yet
- Technical Seminar REPORT Format 1Document3 pagesTechnical Seminar REPORT Format 1Suresh ThallapelliNo ratings yet
- 2023 IEEEC Comparative Study of Regression Models For PV Power PredictionDocument6 pages2023 IEEEC Comparative Study of Regression Models For PV Power PredictionNtokozo HlatshwayoNo ratings yet
- Review of Demand Side Management With Thermostatically Controllable LoadsDocument5 pagesReview of Demand Side Management With Thermostatically Controllable LoadsSunil KumarNo ratings yet
- Document 01Document4 pagesDocument 01swaraj dhumalNo ratings yet
- A Study On High Frequency Transformer Design With Different Core Configurations For Flyback Converter TopologyDocument5 pagesA Study On High Frequency Transformer Design With Different Core Configurations For Flyback Converter TopologyAaqib Ahmad QureshiNo ratings yet
- Performance Analysis of Offshore Floating PV Systems in Isolated AreaDocument5 pagesPerformance Analysis of Offshore Floating PV Systems in Isolated AreafaqihalfaruqNo ratings yet
- EV SeminarDocument11 pagesEV SeminarMaitreyee NirgunNo ratings yet
- Hydroponic Farming Using IoTDocument4 pagesHydroponic Farming Using IoTbachupavankumar43No ratings yet
- Design and Analysis of Bidirectional Battery Charger For Electric VehicleDocument7 pagesDesign and Analysis of Bidirectional Battery Charger For Electric Vehiclebabu tech guruNo ratings yet
- GUCONDocument6 pagesGUCONNasir RehmanNo ratings yet
- Transient Performance of Voltage Source Converter in V2G and G2V Electric Vehicles ApplicationDocument7 pagesTransient Performance of Voltage Source Converter in V2G and G2V Electric Vehicles Applicationbabu tech guruNo ratings yet
- Analysis of A Regenerative Braking System of BLDC Motor in Targeting Electric Vehicle ImplementationDocument5 pagesAnalysis of A Regenerative Braking System of BLDC Motor in Targeting Electric Vehicle ImplementationDEBARATI DAMNo ratings yet
- Project Report B TechDocument59 pagesProject Report B Techrushabhshinde001No ratings yet
- Implementation of Hysteresis Voltage Control For Different Inverter TopologiesDocument6 pagesImplementation of Hysteresis Voltage Control For Different Inverter TopologiesHema ChanderNo ratings yet
- A Review of Arduinobased Hand Gesture Controlled Robot Using IoTDocument4 pagesA Review of Arduinobased Hand Gesture Controlled Robot Using IoTpobawi8574No ratings yet
- Design and Analysis of MPPT Charge ControllerDocument5 pagesDesign and Analysis of MPPT Charge Controllergizem yNo ratings yet
- Development of ON Road Charging System For Electric Vehicle ApplicationsDocument6 pagesDevelopment of ON Road Charging System For Electric Vehicle ApplicationsBhargavi KmNo ratings yet
- A Review Supercapacitors Suitability As An Alternative To Li-Ion Batteries in Ultra-Low Power DevicesDocument6 pagesA Review Supercapacitors Suitability As An Alternative To Li-Ion Batteries in Ultra-Low Power Devicespatientmutunda23No ratings yet
- White Blue Minimalist CV ResumeDocument2 pagesWhite Blue Minimalist CV Resumeazulhakim309No ratings yet
- Yakshraj Report of Mtech 21nov WhiteDocument39 pagesYakshraj Report of Mtech 21nov Whiteravi kumarNo ratings yet
- Major Project 7 Sem (1) - Pages-1-4,6Document5 pagesMajor Project 7 Sem (1) - Pages-1-4,6ManishNo ratings yet
- Batchelor of Technology: A Project Report Submitted in Partial Fulfilment of The Requirements For The Award of The DegreeDocument64 pagesBatchelor of Technology: A Project Report Submitted in Partial Fulfilment of The Requirements For The Award of The DegreeRam Kumar GogadaNo ratings yet
- Ic Trainer Kit - 1Document6 pagesIc Trainer Kit - 1ashfaq mohammedNo ratings yet
- Starting Pages Karan 1Document5 pagesStarting Pages Karan 1Shubham MalvadkarNo ratings yet
- Development of Intelligent Automatic Electronic MCB and ELCB Using Fault Diagnosis TechniqueDocument5 pagesDevelopment of Intelligent Automatic Electronic MCB and ELCB Using Fault Diagnosis TechniqueKokoh RayNo ratings yet
- Visvesvaraya Technological University: SAI Vidya Institute OF TechnologyDocument18 pagesVisvesvaraya Technological University: SAI Vidya Institute OF TechnologyKrishna KrishNo ratings yet
- Enabling Floating Solar Photovoltaic Development: Jawaharlal Nehru Technological University HyderabadDocument3 pagesEnabling Floating Solar Photovoltaic Development: Jawaharlal Nehru Technological University Hyderabad19tk1ao222 md faisal aliNo ratings yet
- Designing High Power Density Induction Motors For Electric PropulsionDocument6 pagesDesigning High Power Density Induction Motors For Electric PropulsiondftghsNo ratings yet
- Gprs Based Embedded System For Air Pollution MonitoringDocument6 pagesGprs Based Embedded System For Air Pollution MonitoringbalajigururajNo ratings yet
- Kiran ICCCA2021Document5 pagesKiran ICCCA2021Md Moinul Alom ShovonNo ratings yet
- Enhancement of Regenerative Power Utilization For Electric Vehicle by Using Eddy Current BrakeDocument5 pagesEnhancement of Regenerative Power Utilization For Electric Vehicle by Using Eddy Current BrakekpenteyssNo ratings yet
- Activity 4 MergedDocument11 pagesActivity 4 MergedStalan JonathanNo ratings yet
- Understanding of Incipient Discharges in Transformer Insulation by Reconstruction of Digital Twins For The Discharges Using Generative Adversarial NetworksDocument4 pagesUnderstanding of Incipient Discharges in Transformer Insulation by Reconstruction of Digital Twins For The Discharges Using Generative Adversarial NetworksSathu Yaduvamsee ee23e007No ratings yet
- Government Engineering College, Bikaner: Department of Electrical Engineering Training ReportDocument1 pageGovernment Engineering College, Bikaner: Department of Electrical Engineering Training ReportRAJENDRA KUMAWATNo ratings yet
- A Literature Review On Open End WindingsDocument4 pagesA Literature Review On Open End WindingsAbd DawaraNo ratings yet
- 3D Integrated Circuits: Technical Seminar ReportDocument31 pages3D Integrated Circuits: Technical Seminar ReportRohit ChandranNo ratings yet
- Mitigation of Cogging Torque For The Optimal Design of BLDC MotorDocument5 pagesMitigation of Cogging Torque For The Optimal Design of BLDC MotorTejas PanchalNo ratings yet
- Majhar ReportDocument23 pagesMajhar ReportAkash TalekarNo ratings yet
- Chaitanya Final (1) - PagenumberDocument62 pagesChaitanya Final (1) - Pagenumbergnithin920No ratings yet
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- J Eurpolymj 2020 109485Document63 pagesJ Eurpolymj 2020 109485MZeeshanAkramNo ratings yet
- Acs800 11 0020 5Document2 pagesAcs800 11 0020 5Yoga IsmuNo ratings yet
- TEKO DAS Part C-Safety - Warnings - 91 080 0783-03Document20 pagesTEKO DAS Part C-Safety - Warnings - 91 080 0783-03test321yNo ratings yet
- Vlsi Design Unit 3 2019Document34 pagesVlsi Design Unit 3 2019Ishan Mahendra PatelNo ratings yet
- Handout #4: CMOS Arithmetic Logic Unit: CG2027 Transistor-Level Digital CircuitsDocument27 pagesHandout #4: CMOS Arithmetic Logic Unit: CG2027 Transistor-Level Digital CircuitsPeng FeiNo ratings yet
- Mohamad Azfar Aizat Bin Mohammad Zaki - 201361518 (Ry32 Robotic and Automation)Document11 pagesMohamad Azfar Aizat Bin Mohammad Zaki - 201361518 (Ry32 Robotic and Automation)LIEW HUI FANG UNIMAPNo ratings yet
- PVREA Transformer Impedance Data - 2023 PDFDocument1 pagePVREA Transformer Impedance Data - 2023 PDFhaiqal ghaniNo ratings yet
- Part Book HANSHINDocument57 pagesPart Book HANSHINService PTNK100% (2)
- Electronics and Communication Ece Formula Book For Gate Ies and PsuDocument14 pagesElectronics and Communication Ece Formula Book For Gate Ies and PsuAmar AzadNo ratings yet
- BHILAI HOUSE, G.E. ROAD, DURG (C.G.) - 491001: Sub Code & Name:328713 (28) Microcontroller & Embedded Systems LabDocument3 pagesBHILAI HOUSE, G.E. ROAD, DURG (C.G.) - 491001: Sub Code & Name:328713 (28) Microcontroller & Embedded Systems LabYudi JoshiNo ratings yet
- EE499 Final Project PosterDocument1 pageEE499 Final Project PosterRoaia RotaNo ratings yet
- Maha Mai EngineersDocument12 pagesMaha Mai EngineersaatishsegaNo ratings yet
- Electronics and Oem Industry Solutions Guide: Increase Performance, Improve Quality, and Protect Your BrandDocument22 pagesElectronics and Oem Industry Solutions Guide: Increase Performance, Improve Quality, and Protect Your BrandHariNo ratings yet
- Literature Review For GSM Based Home AutomationDocument6 pagesLiterature Review For GSM Based Home Automationc5r9j6zjNo ratings yet
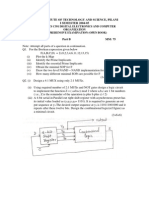
- Birla Institute of Technology and Science, Pilani I SEMESTER 2004-05Document6 pagesBirla Institute of Technology and Science, Pilani I SEMESTER 2004-05navaneeth_kumarNo ratings yet
- Montana 600 QSM EN PDFDocument12 pagesMontana 600 QSM EN PDFGheorghe HaziNo ratings yet
- Onixs Servo Motor Stabilizer Control - SA-0.5-ST100Document1 pageOnixs Servo Motor Stabilizer Control - SA-0.5-ST100Salman AneesNo ratings yet
- Topics For Thesis in Electronics and CommunicationDocument8 pagesTopics For Thesis in Electronics and Communicationfjbnd9fq100% (2)
- Qsmotor After Sales Manuals For Motor Kits One For One v2.3Document9 pagesQsmotor After Sales Manuals For Motor Kits One For One v2.3Jaga Karsa BFNo ratings yet
- ABB-Tmax-T7-MCCB - 208V - 1200ADocument11 pagesABB-Tmax-T7-MCCB - 208V - 1200Amohamed aymanNo ratings yet
- Measurement Microphones (2020)Document5 pagesMeasurement Microphones (2020)Göestaf ZarNo ratings yet
- G300 - Wiring DiagramDocument3 pagesG300 - Wiring DiagramAsad NizamNo ratings yet
- Megawin M135CDocument16 pagesMegawin M135Cvlaxis cncNo ratings yet
- ACS800 ACS880 Migration Profibus HintDocument4 pagesACS800 ACS880 Migration Profibus HintAdrián ValenzuelaNo ratings yet
- A Survey of Non-Conventional TechniquesDocument14 pagesA Survey of Non-Conventional TechniquesZulfiqar AliNo ratings yet
- Operating Manual For OPTOCORE X6R/V3R-FX Network Converter DevicesDocument28 pagesOperating Manual For OPTOCORE X6R/V3R-FX Network Converter DevicesPéricles OliveiraNo ratings yet