You might also like
- Electrical Handbook Formula Book SampleDocument73 pagesElectrical Handbook Formula Book Samplesnitin26100% (2)
- Repairing Electric MotorsDocument7 pagesRepairing Electric Motorsbhdamr100% (4)
- H T Drives PDFDocument58 pagesH T Drives PDFDipikaNo ratings yet
- 4.5 Electric Motors PDFDocument5 pages4.5 Electric Motors PDFmufti.adhigunaNo ratings yet
- Load Testing of Motors: Common Methods, Procedures: Test Can Verify Nameplate RatingDocument3 pagesLoad Testing of Motors: Common Methods, Procedures: Test Can Verify Nameplate RatingAli JafferyNo ratings yet
- Balun Design - GiftsforsubsDocument16 pagesBalun Design - GiftsforsubsDiego García MedinaNo ratings yet
- Stepper MotorDocument26 pagesStepper MotorSupriya Rakshit100% (1)
- Vector Control of Induction MotorDocument11 pagesVector Control of Induction MotorTushar GargNo ratings yet
- Resume Sabir MoiduDocument9 pagesResume Sabir MoiduSABIRNo ratings yet
- Electrical Working 6 Month To 3 Years Delhi and Near 15aug2017!1!852Document216 pagesElectrical Working 6 Month To 3 Years Delhi and Near 15aug2017!1!852prerna nandNo ratings yet
- Pre-Commissioning Test of Transformer at SiteDocument2 pagesPre-Commissioning Test of Transformer at SiteMohammad Husain86% (7)
- A New Multi-Input DC-DC Converter Integrated MPPT System For Hybrid Renewable Energy and Battery StorageDocument6 pagesA New Multi-Input DC-DC Converter Integrated MPPT System For Hybrid Renewable Energy and Battery StoragesankarNo ratings yet
- A Review Supercapacitors Suitability As An Alternative To Li-Ion Batteries in Ultra-Low Power DevicesDocument6 pagesA Review Supercapacitors Suitability As An Alternative To Li-Ion Batteries in Ultra-Low Power Devicespatientmutunda23No ratings yet
- Journal IEEEDocument5 pagesJournal IEEEvetrivelkishore82No ratings yet
- Waghe 2020Document5 pagesWaghe 2020Abdlfettah BOUSSAIDNo ratings yet
- Transient Performance of Voltage Source Converter in V2G and G2V Electric Vehicles ApplicationDocument7 pagesTransient Performance of Voltage Source Converter in V2G and G2V Electric Vehicles Applicationbabu tech guruNo ratings yet
- Modeling and Simulation of Electric Vehicles Using Simulink and SimscapeDocument6 pagesModeling and Simulation of Electric Vehicles Using Simulink and SimscapeFrankenstein ReichNo ratings yet
- On Feasibility of Ultracapacitor Full Electric Transit Bus For Jakarta IndonesiaDocument5 pagesOn Feasibility of Ultracapacitor Full Electric Transit Bus For Jakarta IndonesiaAndhitatyasNo ratings yet
- A Literature Review On Open End WindingsDocument4 pagesA Literature Review On Open End WindingsAbd DawaraNo ratings yet
- An Overview of Electric Motors For Electric VehiclesDocument6 pagesAn Overview of Electric Motors For Electric VehiclesAsha C ANo ratings yet
- Analysis of A Regenerative Braking System of BLDC Motor in Targeting Electric Vehicle ImplementationDocument5 pagesAnalysis of A Regenerative Braking System of BLDC Motor in Targeting Electric Vehicle ImplementationDEBARATI DAMNo ratings yet
- Cuk ConverterDocument8 pagesCuk Convertervaneeza ahmedNo ratings yet
- Understanding of Incipient Discharges in Transformer Insulation by Reconstruction of Digital Twins For The Discharges Using Generative Adversarial NetworksDocument4 pagesUnderstanding of Incipient Discharges in Transformer Insulation by Reconstruction of Digital Twins For The Discharges Using Generative Adversarial NetworksSathu Yaduvamsee ee23e007No ratings yet
- Cogging Torque Mitigation For Permanent Magnet Synchronous Motor Using Stator Slots DesignDocument7 pagesCogging Torque Mitigation For Permanent Magnet Synchronous Motor Using Stator Slots DesignMellina LisboaNo ratings yet
- Optimizing Solar Panel Tilt Using Machine Learning TechniquesDocument6 pagesOptimizing Solar Panel Tilt Using Machine Learning TechniquesHabiba HassanNo ratings yet
- Impact of The Transformer Magnetizing Inductance On The Performance of The Dual-Active Bridge ConverterDocument7 pagesImpact of The Transformer Magnetizing Inductance On The Performance of The Dual-Active Bridge ConverterAsad ShahbazNo ratings yet
- Solar Levelized Cost of Energy ProjectioDocument5 pagesSolar Levelized Cost of Energy Projectiorian-jiee-tauwwa-8573No ratings yet
- A High-Efficiency Power Generator by Footsteps Using Piezoelectric EffectDocument7 pagesA High-Efficiency Power Generator by Footsteps Using Piezoelectric EffectBen Cherian KoshyNo ratings yet
- Sheetal Cyriac Virtual Impedance Based StabilizationDocument6 pagesSheetal Cyriac Virtual Impedance Based StabilizationHossein AbediniNo ratings yet
- An Arduino Uno Controlled Fire Fighting Robot For Fires in Enclosed SpacesDocument5 pagesAn Arduino Uno Controlled Fire Fighting Robot For Fires in Enclosed SpacesSravaniNo ratings yet
- Dynamic Wireless Charging System For Electric Vehicles Based On Ultra-Capacitor Integrated Magnetic Resonance CouplingDocument6 pagesDynamic Wireless Charging System For Electric Vehicles Based On Ultra-Capacitor Integrated Magnetic Resonance CouplingjogeshNo ratings yet
- Anovelmethodfor ArduinobasedelectricvehicleemulatorDocument9 pagesAnovelmethodfor Arduinobasedelectricvehicleemulator162SHREEPARNA DHARANo ratings yet
- Performance Evaluation GUI For 50 MW Large Scale Solar PV SystemDocument5 pagesPerformance Evaluation GUI For 50 MW Large Scale Solar PV SystemNajib HussainNo ratings yet
- Investigating The Linearity Behavior of Dual Gate Junction Less MOSFET With High-K Gate Stack at Cryogenic TemperaturesDocument4 pagesInvestigating The Linearity Behavior of Dual Gate Junction Less MOSFET With High-K Gate Stack at Cryogenic TemperaturesRittik GhoshNo ratings yet
- Review of Demand Side Management With Thermostatically Controllable LoadsDocument5 pagesReview of Demand Side Management With Thermostatically Controllable LoadsSunil KumarNo ratings yet
- Bidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesDocument6 pagesBidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesOscar Olarte OrtizNo ratings yet
- Hashir Shah S/O Syed Arif Shah Electrical (Power) EngineerDocument5 pagesHashir Shah S/O Syed Arif Shah Electrical (Power) EngineerMuaz AhmedNo ratings yet
- A New Triswitching Double Duty High Voltage Gain Boost Converter For DC Nanogrid ApplicationDocument7 pagesA New Triswitching Double Duty High Voltage Gain Boost Converter For DC Nanogrid ApplicationAQEEL ANWARNo ratings yet
- Power Efficiency Top-Down ALU For Error Correction and Detection CircuitDocument1 pagePower Efficiency Top-Down ALU For Error Correction and Detection CircuitdeivasigamaniNo ratings yet
- Design and Simulation of Mems Based Piezoelectric Acoustic SensorDocument4 pagesDesign and Simulation of Mems Based Piezoelectric Acoustic SensorveenaNo ratings yet
- Design and Development of A Smart Shopping Cart SystemDocument5 pagesDesign and Development of A Smart Shopping Cart SystemNihed JebaliNo ratings yet
- Renewable Energy Integrated DC Microgrid For EV Charging StationDocument6 pagesRenewable Energy Integrated DC Microgrid For EV Charging Stationbhoomi3421No ratings yet
- IntelligentControllerforaStand AloneDocument9 pagesIntelligentControllerforaStand AloneselvaNo ratings yet
- Li-Ion Battery Life Estimation Using K-Nearest Neighbor AlgorithmDocument5 pagesLi-Ion Battery Life Estimation Using K-Nearest Neighbor Algorithmmonaim bensabuerNo ratings yet
- Enhancement of Regenerative Power Utilization For Electric Vehicle by Using Eddy Current BrakeDocument5 pagesEnhancement of Regenerative Power Utilization For Electric Vehicle by Using Eddy Current BrakekpenteyssNo ratings yet
- 21PVPAECIC03Document5 pages21PVPAECIC03Satyendra KumarNo ratings yet
- Design and Analysis of High Performance of A BLDC Motor For Electric VehicleDocument4 pagesDesign and Analysis of High Performance of A BLDC Motor For Electric VehicleShubhzsNo ratings yet
- 21DNIIIVECIC02Document7 pages21DNIIIVECIC02Satyendra KumarNo ratings yet
- Solar Photo Voltaic Based Water Pumping Using BLDC MotorDocument5 pagesSolar Photo Voltaic Based Water Pumping Using BLDC MotorDhinu LalNo ratings yet
- White Blue Minimalist CV ResumeDocument2 pagesWhite Blue Minimalist CV Resumeazulhakim309No ratings yet
- MTech MBA MCA 2022 23 Spo Courses EligibilityDocument5 pagesMTech MBA MCA 2022 23 Spo Courses EligibilitySankaraSatyadevNo ratings yet
- Implementation of Hysteresis Voltage Control For Different Inverter TopologiesDocument6 pagesImplementation of Hysteresis Voltage Control For Different Inverter TopologiesHema ChanderNo ratings yet
- Ev ChargingDocument6 pagesEv ChargingVishal PatilNo ratings yet
- 6-Büşra BahatDocument4 pages6-Büşra BahatAYŞE NURNo ratings yet
- Matrix Based ConverterDocument6 pagesMatrix Based ConverterPrashaant YerrapragadaNo ratings yet
- Call For Papers: IET Power ElectronicsDocument1 pageCall For Papers: IET Power ElectronicsDar JahangeerNo ratings yet
- Efficient Battery Monitoring System For E-VehiclesDocument4 pagesEfficient Battery Monitoring System For E-VehiclesAkash KumarNo ratings yet
- Yakshraj Report of Mtech 21nov WhiteDocument39 pagesYakshraj Report of Mtech 21nov Whiteravi kumarNo ratings yet
- Kiran ICCCA2021Document5 pagesKiran ICCCA2021Md Moinul Alom ShovonNo ratings yet
- Development of Intelligent Automatic Electronic MCB and ELCB Using Fault Diagnosis TechniqueDocument5 pagesDevelopment of Intelligent Automatic Electronic MCB and ELCB Using Fault Diagnosis TechniqueKokoh RayNo ratings yet
- Secure Communication With Chaos and Electronic CircuitDocument20 pagesSecure Communication With Chaos and Electronic CircuitSanjeev Kumar PandeyNo ratings yet
- Wireless Bus Identification System For Visually Impaired PersonDocument6 pagesWireless Bus Identification System For Visually Impaired Personruthika.j2021No ratings yet
- Wireless Charging of Electric Vehicles Using Dual Spiral Coil Magnetic Resonant CouplingDocument6 pagesWireless Charging of Electric Vehicles Using Dual Spiral Coil Magnetic Resonant CouplingIJRASETPublicationsNo ratings yet
- Dharamdeo Kumar (2022)Document6 pagesDharamdeo Kumar (2022)RizkiNo ratings yet
- Design and Comparison of Three Surface-Mounted PM Motors For A Light Electric VehicleDocument6 pagesDesign and Comparison of Three Surface-Mounted PM Motors For A Light Electric VehicleNaveen KarriNo ratings yet
- Design of A Low-Cost and Simple Solar Emulator For Laboratory StudiesDocument4 pagesDesign of A Low-Cost and Simple Solar Emulator For Laboratory StudiesdeemahhwNo ratings yet
- Effects of Different Charging and Discharging Modes On Thermal Behavior of Lithium Ion BatteriesDocument10 pagesEffects of Different Charging and Discharging Modes On Thermal Behavior of Lithium Ion BatteriesdftghsNo ratings yet
- 2005 Chen, Wan, Wang - Thermal Analysis of Lithium-Ion Batteries - PDF (2005)Document14 pages2005 Chen, Wan, Wang - Thermal Analysis of Lithium-Ion Batteries - PDF (2005)dftghsNo ratings yet
- Performance Assessment of A Lithium-Polymer Battery For HEV Utilizing Pack-Level Battery Hardware-in-the-Loop-Simulation SystemDocument8 pagesPerformance Assessment of A Lithium-Polymer Battery For HEV Utilizing Pack-Level Battery Hardware-in-the-Loop-Simulation SystemdftghsNo ratings yet
- Modeling and Control of A Modular Battery Management System For LDocument106 pagesModeling and Control of A Modular Battery Management System For LdftghsNo ratings yet
- FTang Probes-Boards Transmitters 2013 21-11-17Document8 pagesFTang Probes-Boards Transmitters 2013 21-11-17dftghsNo ratings yet
- A Design of Air Flow Configuration For Cooling Lithium Ion Battery in Hybrid Electric VehiclesDocument7 pagesA Design of Air Flow Configuration For Cooling Lithium Ion Battery in Hybrid Electric VehiclesdftghsNo ratings yet
- Thermal Runaway Propagation Behavior Within 18650 Lithium Ion Battery Packs A Modeling StudyDocument10 pagesThermal Runaway Propagation Behavior Within 18650 Lithium Ion Battery Packs A Modeling StudydftghsNo ratings yet
- Thermal Analyses of LiCoO2 Lithium-Ion Battery During Oven TestsDocument12 pagesThermal Analyses of LiCoO2 Lithium-Ion Battery During Oven TestsdftghsNo ratings yet
- Understanding The Limitations of Lithium Ion Batteries at High RatesDocument9 pagesUnderstanding The Limitations of Lithium Ion Batteries at High RatesdftghsNo ratings yet
- High Performance Cooling of Traction BrushlessDocument96 pagesHigh Performance Cooling of Traction BrushlessdftghsNo ratings yet
- DC Selsyn Synchro SystemDocument4 pagesDC Selsyn Synchro SystemSarwar BhuiyanNo ratings yet
- SSD Course PlanDocument5 pagesSSD Course PlanDhamu DharanNo ratings yet
- EMD June 2012Document2 pagesEMD June 2012kmnath1965No ratings yet
- Wound Rotor Induction MotorsDocument8 pagesWound Rotor Induction Motorsmass72No ratings yet
- DC Motor Interview Questions and Answers: AnswerDocument4 pagesDC Motor Interview Questions and Answers: Answerশ্রী লিমন চন্দ্র মোহন্তNo ratings yet
- DC Motor Hard Copy ReportDocument13 pagesDC Motor Hard Copy ReportShang Divina Ebrada100% (1)
- Course Title: Electrical Drives Dated: 01-12-2014 Course Code: EEE 3422 Course Structure: 3-1-0-4 Course ObjectivesDocument3 pagesCourse Title: Electrical Drives Dated: 01-12-2014 Course Code: EEE 3422 Course Structure: 3-1-0-4 Course ObjectivesAR-TNo ratings yet
- Electrical Machine Tutorial 1Document3 pagesElectrical Machine Tutorial 1afiqNo ratings yet
- 4AM5xxx eDocument4 pages4AM5xxx ezuyao100% (1)
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature Machineantriksh mahajanNo ratings yet
- Ball Mill - B - 1501045 - ANTAP - 26 - Technical - Data - and - Drawings - en - IndexA PDFDocument42 pagesBall Mill - B - 1501045 - ANTAP - 26 - Technical - Data - and - Drawings - en - IndexA PDFMichel Ivan SalyrosasNo ratings yet
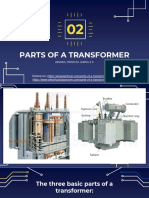
- Parts of A TransformerDocument22 pagesParts of A TransformerJohn David RomasantaNo ratings yet
- Final Exam SEE3433 2011 MeiDocument9 pagesFinal Exam SEE3433 2011 MeiFizah Abdul RahmanNo ratings yet
- EE8002 Design of Electrical ApparatusDocument2 pagesEE8002 Design of Electrical ApparatuskrishnandrkNo ratings yet
- Star Delta Motor Starter Wiring DiagramDocument1 pageStar Delta Motor Starter Wiring DiagramWilson (Electrical Engineer)No ratings yet
- Analisa Kinerja Motor Induksi 3 Fasa Pada Pompa Sentrifugal Di Favehotel Rungkut SurabayaDocument6 pagesAnalisa Kinerja Motor Induksi 3 Fasa Pada Pompa Sentrifugal Di Favehotel Rungkut Surabayamuh fadliNo ratings yet
- Components of TransformersDocument2 pagesComponents of TransformersHimanshu choudharyNo ratings yet
- 15mva 33-11KVDocument1 page15mva 33-11KVMubarak AleemNo ratings yet
- Starting Motor 5 5KW 22170 1Document2 pagesStarting Motor 5 5KW 22170 1Anonymous cS9UMvhBqNo ratings yet
- An Aggregate Induction Motor Model For Industrial PlantsDocument8 pagesAn Aggregate Induction Motor Model For Industrial PlantsB.Neelakanteshwar RaoNo ratings yet
- BEV 45401 E1 Design of 1 Phase 2S-2P PMSMDocument14 pagesBEV 45401 E1 Design of 1 Phase 2S-2P PMSMsedarNo ratings yet
- Parts of A Magnetic ContactorDocument15 pagesParts of A Magnetic ContactorPriince Dwi Ght100% (1)