You might also like
- Bell 1706C Plus System ChecksDocument12 pagesBell 1706C Plus System ChecksLeonNo ratings yet
- CAN Bus DiagnosticoDocument29 pagesCAN Bus DiagnosticoaimerNo ratings yet
- Programming Manual CR0411 PDFDocument242 pagesProgramming Manual CR0411 PDFmarius.chitigaNo ratings yet
- HitachiDocument166 pagesHitachipiaspark100% (4)
- 6 HydraulicDocument70 pages6 HydraulicBaciu Nicolae100% (2)
- DA - 01 - Foreword - EnglishDocument14 pagesDA - 01 - Foreword - EnglishAugusto OliveiraNo ratings yet
- Bus Door CatalogDocument20 pagesBus Door CatalogSudheerKumarNo ratings yet
- Fdocuments - in Wabco Tebs eDocument225 pagesFdocuments - in Wabco Tebs etikiNo ratings yet
- Diagrama Electrico D9N-CBJ000481Document2 pagesDiagrama Electrico D9N-CBJ000481luisitolokitod100% (1)
- VT2006PTDocument62 pagesVT2006PTferdiNo ratings yet
- qsk60 Engine ControlsDocument27 pagesqsk60 Engine Controlsзавир мансуровNo ratings yet
- High Performance Stepper System ControllerDocument107 pagesHigh Performance Stepper System Controllerxor_45No ratings yet
- mm37 PDFDocument32 pagesmm37 PDFSaša OljačaNo ratings yet
- Owner'S Manual: ECN-M0255 Rev. 1.3, Date 07-10-2013 Part #90-0613-100Document36 pagesOwner'S Manual: ECN-M0255 Rev. 1.3, Date 07-10-2013 Part #90-0613-100Анатолий РябухаNo ratings yet
- Salwico cs3004Document108 pagesSalwico cs3004завир мансуров100% (1)
- CAN BUS IntroductionDocument34 pagesCAN BUS Introductionpatricio castro artigaNo ratings yet
- c12+ Diagrams PDFDocument11 pagesc12+ Diagrams PDFHector CardenasNo ratings yet
- Diagnostics and Trouble-Shooting Manual: TH SeriesDocument39 pagesDiagnostics and Trouble-Shooting Manual: TH Seriesdwicahyokurniawan100% (1)
- Sany S800S ReviewDocument11 pagesSany S800S ReviewJuna PasaribuNo ratings yet
- Celect Codes: A Complete List of All Celect Fault Codes For The Cummins EcmDocument3 pagesCelect Codes: A Complete List of All Celect Fault Codes For The Cummins EcmEduardo TorresNo ratings yet
- Can BusDocument2 pagesCan BusHelder CabralNo ratings yet
- Marlins Test Kita - READINGDocument22 pagesMarlins Test Kita - READINGзавир мансуровNo ratings yet
- Injector NozleDocument25 pagesInjector NozleHariNo ratings yet
- 1324 ManualDocument28 pages1324 ManualAndreaNo ratings yet
- (PDF) Marlins Online Test Answers - Moustafa Mahmoud - Academia - EduDocument7 pages(PDF) Marlins Online Test Answers - Moustafa Mahmoud - Academia - Eduзавир мансуровNo ratings yet
- SM - Volvo L110F Wheel LoaderDocument14 pagesSM - Volvo L110F Wheel LoaderEmanuel VillarruelNo ratings yet
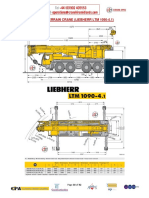
- Liebherr LTM 1090 4.1 PDFDocument2 pagesLiebherr LTM 1090 4.1 PDFyousuf79No ratings yet
- New Holland E115SR, E135SR Crawler Excavator Service Repair Workshop ManualDocument21 pagesNew Holland E115SR, E135SR Crawler Excavator Service Repair Workshop ManualggjjjjotonesNo ratings yet
- ED PlcWin 1eng Manuale 1 - 06Document8 pagesED PlcWin 1eng Manuale 1 - 06AbdullahNo ratings yet
- Solar Assisted Electric Bicycle Project ReportDocument40 pagesSolar Assisted Electric Bicycle Project ReportVaibhav Patil0% (1)
- PC600 (LC) 8 UEN00128 01 TroubleshootingDocument368 pagesPC600 (LC) 8 UEN00128 01 TroubleshootingdatphuongNo ratings yet
- M2424a service-YESDocument428 pagesM2424a service-YESystloveNo ratings yet
- B35D B40D MKIII PneumaticsDocument12 pagesB35D B40D MKIII PneumaticsBassieNo ratings yet
- Marlins Test Kita - Re-Arrange WordDocument8 pagesMarlins Test Kita - Re-Arrange Wordзавир мансуров100% (1)
- Marlins Test Kita - PronunciationDocument7 pagesMarlins Test Kita - Pronunciationзавир мансуровNo ratings yet
- Excavator: Inspection Before Engine StartDocument2 pagesExcavator: Inspection Before Engine StartAkbarNo ratings yet
- Marlins Test Kita - LISTENINGDocument18 pagesMarlins Test Kita - LISTENINGзавир мансуров86% (7)
- Palfinger 56000Document3 pagesPalfinger 56000WaldomiroCanoNo ratings yet
- FX1N PLC HW ManualDocument90 pagesFX1N PLC HW Manualaar9999No ratings yet
- 104 ManualDocument6 pages104 ManualArokiaraj RajNo ratings yet
- H8 Family of MicrocontrollersDocument46 pagesH8 Family of MicrocontrollersMansoor AliNo ratings yet
- Phaser 740 Parts ServiceDocument127 pagesPhaser 740 Parts ServicelftrevNo ratings yet
- Error Code List E 350-450Document19 pagesError Code List E 350-450Nguyen HoangNo ratings yet
- Tecnord JHM DatasheetDocument10 pagesTecnord JHM Datasheetfrancisco santiago gallardoNo ratings yet
- Configuration ModeDocument40 pagesConfiguration ModeDANIEL VARGAS RODRIGUEZNo ratings yet
- Western PlowDocument39 pagesWestern Plowcalsal22100% (1)
- Mitsubishi PLC FX1S-FX1N-FX2N Series Programming Manual (PDFDrive) PDFDocument466 pagesMitsubishi PLC FX1S-FX1N-FX2N Series Programming Manual (PDFDrive) PDFHandi KsciNo ratings yet
- Rdso SPN 144Document34 pagesRdso SPN 144aniltejas61100% (1)
- Braking System TroubleshootingDocument3 pagesBraking System TroubleshootingmoammerNo ratings yet
- Sculi and Lidia Order Form - Emt: User InformationDocument1 pageSculi and Lidia Order Form - Emt: User InformationSuit ChetriNo ratings yet
- Dokumen - Tips - Fiat Kobelco E70sr Mini Crawler Excavator Service Repair ManualDocument11 pagesDokumen - Tips - Fiat Kobelco E70sr Mini Crawler Excavator Service Repair Manuallahcen boudaoudNo ratings yet
- Esquemas Hidráulico e ElétricoDocument2 pagesEsquemas Hidráulico e ElétricoHelioNo ratings yet
- John Deere AutoTrac™ Controller-Raven Diagnostic Trouble Codes (DTC) List AL70325,000014E-19-20141121Document3 pagesJohn Deere AutoTrac™ Controller-Raven Diagnostic Trouble Codes (DTC) List AL70325,000014E-19-20141121Tarik OttoboniNo ratings yet
- OPR0002 DX Wheel OperationDocument29 pagesOPR0002 DX Wheel OperationvarthotNo ratings yet
- 962g Trans TestDocument14 pages962g Trans Testluis eduardo corzo enriquezNo ratings yet
- Magnet Controller 15kW Electrical SystemDocument2 pagesMagnet Controller 15kW Electrical Systemrgcsadlerhotmail.comNo ratings yet
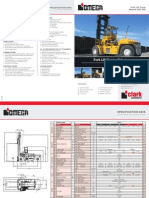
- OmegaDocument2 pagesOmegaATHOLSCHWARZNo ratings yet
- Manual Ingles Inversor Acs400 AbbDocument174 pagesManual Ingles Inversor Acs400 Abbwanderson28No ratings yet
- Pin Assignment of Plug Connection A22 X1: Figure LegendDocument1 pagePin Assignment of Plug Connection A22 X1: Figure LegendYassin HijaziNo ratings yet
- Case 721D - GB PDFDocument8 pagesCase 721D - GB PDFHelverNo ratings yet
- Kobelco Mark IV: Kobelt ODocument34 pagesKobelco Mark IV: Kobelt OVictor Hugo Mezquita100% (1)
- Bent Axis Var Motor Repair InstructionsDocument20 pagesBent Axis Var Motor Repair InstructionshaggNo ratings yet
- Maintenance by Garr BhuwaDocument8 pagesMaintenance by Garr BhuwaejazNo ratings yet
- Manual de Usuario: Anexo D: GrafcetsDocument19 pagesManual de Usuario: Anexo D: GrafcetsWilberFabiánNo ratings yet
- EEM4 Field Activation ProcedureDocument3 pagesEEM4 Field Activation ProcedureMihai PopescuNo ratings yet
- Wiring Diagram: Installation IQAN-MDMDocument2 pagesWiring Diagram: Installation IQAN-MDMjhonatan_silveira_8No ratings yet
- Can Line Testing WaveformsDocument4 pagesCan Line Testing WaveformsRowan CorneliusNo ratings yet
- TEXAS CAN BUS NodoDocument10 pagesTEXAS CAN BUS Nodogiorgio94puglisiNo ratings yet
- CCA TrainingDocument29 pagesCCA TrainingAhmed RaghebNo ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- TeSys Deca - Frame 2 - GV2ME10Document9 pagesTeSys Deca - Frame 2 - GV2ME10завир мансуровNo ratings yet
- 02 0912003-CHP Rev.dDocument9 pages02 0912003-CHP Rev.dзавир мансуровNo ratings yet
- MSA PSMS Fuse FailureDocument5 pagesMSA PSMS Fuse Failureзавир мансуровNo ratings yet
- Electrical System SD6009Document26 pagesElectrical System SD6009завир мансуровNo ratings yet
- Battery Voltage Monitoring Relay: Type: BMCA Low BMCD High & LowDocument2 pagesBattery Voltage Monitoring Relay: Type: BMCA Low BMCD High & Lowзавир мансуровNo ratings yet
- RMP422Si: Remote Multipurpose Analog Input Safety W/HartDocument2 pagesRMP422Si: Remote Multipurpose Analog Input Safety W/Hartзавир мансуровNo ratings yet
- Rele Davleniya MBC 5000 5100 1 PasportDocument6 pagesRele Davleniya MBC 5000 5100 1 Pasportзавир мансуровNo ratings yet
- Lad - Rap User ManualDocument56 pagesLad - Rap User Manualзавир мансуровNo ratings yet
- User Manual ICOM IC T3H EDocument2 pagesUser Manual ICOM IC T3H EFalcoNo ratings yet
- Current Series FeedbackDocument6 pagesCurrent Series FeedbackNaveen GNo ratings yet
- Relé Eletromecânico (COM)Document32 pagesRelé Eletromecânico (COM)Ederson AparecidoNo ratings yet
- Part2 Synchronous CountersDocument6 pagesPart2 Synchronous CountersLilya OuarabNo ratings yet
- E1-V35 - User ManualDocument16 pagesE1-V35 - User Manualhotrokythuat SNTekNo ratings yet
- DI+ Technical Reference Manual - 1.2.3Document27 pagesDI+ Technical Reference Manual - 1.2.3EdgardsoteloNo ratings yet
- Modicon Easy M200 - TM200C24TDocument11 pagesModicon Easy M200 - TM200C24TKushal DixitNo ratings yet
- Ldf7811xx LG Dishwasher Repair Service ManualDocument55 pagesLdf7811xx LG Dishwasher Repair Service ManualEric SimardNo ratings yet
- Jeas 0516 4166-PUBLISHEDOKPVDocument8 pagesJeas 0516 4166-PUBLISHEDOKPVAhmed TahaNo ratings yet
- Lab Exercise On Full Wave and Half Wave SCR RectifiersDocument5 pagesLab Exercise On Full Wave and Half Wave SCR RectifiersSaji Sovis100% (1)
- Arduino-Info - LCD-Blue-I2CDocument7 pagesArduino-Info - LCD-Blue-I2CjpNo ratings yet
- Quint DC DC ConverterDocument51 pagesQuint DC DC Converterchayan83No ratings yet
- At 120 ServiceDocument33 pagesAt 120 ServiceFernando EtchegarayNo ratings yet
- Soal Bahasa Inggris SMK Kelas X K13Document8 pagesSoal Bahasa Inggris SMK Kelas X K13Agan PurwanditamaNo ratings yet
- Comments Resolution Sheet: Owner's Engineering (OE) Services For Teesta/ Korotoa 200 MW (AC) Solar Projects, BangladeshDocument2 pagesComments Resolution Sheet: Owner's Engineering (OE) Services For Teesta/ Korotoa 200 MW (AC) Solar Projects, BangladeshgohilnarendraNo ratings yet
- Controlador VolcanoDocument70 pagesControlador VolcanoCesar VenturoNo ratings yet
- NTD.S.2A.10T.02R.23P.23.0788 REV00 Technical DrawingDocument1 pageNTD.S.2A.10T.02R.23P.23.0788 REV00 Technical DrawingAlex DikiyNo ratings yet
- Sony KDL 46Z4100 S Service ID11347 PDFDocument111 pagesSony KDL 46Z4100 S Service ID11347 PDFendersonNo ratings yet
- Modeling of MicrogridDocument10 pagesModeling of Microgridapip055No ratings yet
- Low Voltage Switchgear Single Line DiagramDocument1 pageLow Voltage Switchgear Single Line DiagramBobby AguirreNo ratings yet
- Fundamentals of Mixed Signals and SensorsDocument4 pagesFundamentals of Mixed Signals and SensorsMaryjane PayaoNo ratings yet
- Abb Manual Change Over and Transfer Switches Ot CDocument40 pagesAbb Manual Change Over and Transfer Switches Ot CNicolaos MavrogenisNo ratings yet
- Basic Operation and Troubleshooting of BAC Electronic Vibration Cutout Switches (VCOS)Document1 pageBasic Operation and Troubleshooting of BAC Electronic Vibration Cutout Switches (VCOS)Nelson VillalbaNo ratings yet
- Automated Smart Trolley With Smart Billing Using ArduinoDocument6 pagesAutomated Smart Trolley With Smart Billing Using ArduinoRohan MNo ratings yet
- InRow SC InstallationDocument44 pagesInRow SC InstallationTechnicus Proyectos ElectromecánicosNo ratings yet
- Cybenetics Evaluation Report Asus TUF-550B-GAMINGDocument17 pagesCybenetics Evaluation Report Asus TUF-550B-GAMINGintel boyNo ratings yet
- ADE2 Assignment Nov 2022 OPDocument4 pagesADE2 Assignment Nov 2022 OPprasad NBLVNo ratings yet