You might also like
- Token Ring Technology ReportFrom EverandToken Ring Technology ReportNo ratings yet
- 05 - Test-Run in High SpeedDocument8 pages05 - Test-Run in High SpeedAndiosoNo ratings yet
- 02 - Machine Room WiringWire ConnectingDocument3 pages02 - Machine Room WiringWire ConnectinggunawanNo ratings yet
- 04 - Test-Run Preparation in High SpeedDocument42 pages04 - Test-Run Preparation in High SpeedArtur AvanesyanNo ratings yet
- 04 - Test-Run Preparation in High SpeedDocument42 pages04 - Test-Run Preparation in High SpeedAndiosoNo ratings yet
- User/proqrammer Manual: CORY200 DaldossDocument12 pagesUser/proqrammer Manual: CORY200 DaldossDANIEL REYESNo ratings yet
- User/proqrammer Manual: CORY200 DaldossDocument12 pagesUser/proqrammer Manual: CORY200 DaldossDANIEL REYESNo ratings yet
- Vdocuments - MX - Type Approval Particulars Inmarsat C Approval Particulars Inmarsat C Mes Mes ModelDocument5 pagesVdocuments - MX - Type Approval Particulars Inmarsat C Approval Particulars Inmarsat C Mes Mes ModelPavankumar PuvvalaNo ratings yet
- IMD17/IMDE17: User ManualDocument13 pagesIMD17/IMDE17: User Manualfrank remediosNo ratings yet
- t1321 e Instructions For Use 2202 2301 2302 2401Document24 pagest1321 e Instructions For Use 2202 2301 2302 2401Jon Claude LopezNo ratings yet
- Pdfen Iris - Asansor.kumanda - Karti 1428913151Document21 pagesPdfen Iris - Asansor.kumanda - Karti 1428913151Mohd Abu AjajNo ratings yet
- P091 084 Ioiscm Um 1105Document30 pagesP091 084 Ioiscm Um 1105Badescu Ionut100% (1)
- 06 - High Speed AdjustmentDocument3 pages06 - High Speed AdjustmentMoises PerelloNo ratings yet
- Delta Ied Quick Start M en 20120608Document94 pagesDelta Ied Quick Start M en 20120608Amin AlbadawiNo ratings yet
- Iris1 NV: High Speed AdjustmentDocument3 pagesIris1 NV: High Speed AdjustmentgunawanNo ratings yet
- Miconic B Et V Doc OtisDocument45 pagesMiconic B Et V Doc OtisAshraful Shohag100% (5)
- Spectrum 1.CdrDocument4 pagesSpectrum 1.CdrTouficFereidNo ratings yet
- High-Tech Range: IRI1-ES-Sensitive Earth Fault Current RelayDocument12 pagesHigh-Tech Range: IRI1-ES-Sensitive Earth Fault Current Relaydave chaudhuryNo ratings yet
- Di (Si) - (1 124) (Trouble Shooting) - 1Document74 pagesDi (Si) - (1 124) (Trouble Shooting) - 1sobin mathewNo ratings yet
- Di1 (Si210) Elevator: Trouble ShootingDocument74 pagesDi1 (Si210) Elevator: Trouble ShootingArnaldo cordovaNo ratings yet
- 104 Door Control Board PM-SSCDocument16 pages104 Door Control Board PM-SSCKevin SilvaNo ratings yet
- 01 Control BoxDocument2 pages01 Control BoxgunawanNo ratings yet
- User Guide: En, De, Es, FR, ItDocument24 pagesUser Guide: En, De, Es, FR, ItDAFUNo ratings yet
- Site EISU Cabling ManualDocument30 pagesSite EISU Cabling ManualLafi Fahed0% (1)
- Opa365 Q11Document22 pagesOpa365 Q11Victor HernandezNo ratings yet
- 802 ManualDocument133 pages802 ManualAnonymous V9fdC6No ratings yet
- L02-EIP Module User ManualDocument37 pagesL02-EIP Module User ManualSergio Mauricio Acuña BravoNo ratings yet
- Datasheet IES-2042PA v1.1Document3 pagesDatasheet IES-2042PA v1.1oring2012No ratings yet
- 01 - Control BoxDocument2 pages01 - Control BoxMoises PerelloNo ratings yet
- Opnet GPON SolutionDocument13 pagesOpnet GPON Solutionrchou77No ratings yet
- 3 - OmDocument40 pages3 - OmJonatasCartaxo100% (1)
- User Guide: En, De, Es, FR, ItDocument24 pagesUser Guide: En, De, Es, FR, ItJuan Pablo BascouNo ratings yet
- Mkvie OverviewDocument39 pagesMkvie OverviewHoucinos Tz100% (1)
- LEM Itz - 5000-sbDocument14 pagesLEM Itz - 5000-sbnaveenNo ratings yet
- MODEL 1310: Vehicle System ControllerDocument4 pagesMODEL 1310: Vehicle System ControllerSergio RecabarrenNo ratings yet
- 15 IM-18003-02 T204-235H&T144H COBO Overload System Handbook-V2 ENGDocument24 pages15 IM-18003-02 T204-235H&T144H COBO Overload System Handbook-V2 ENGGoro marconnetNo ratings yet
- LG OtisDocument58 pagesLG OtisAhmed Al-RabayahNo ratings yet
- Iv5 SINCOS Encoder Option 081208 Eng PDFDocument16 pagesIv5 SINCOS Encoder Option 081208 Eng PDFIsmailNo ratings yet
- MappingDocument10 pagesMappingPurathany PalanyNo ratings yet
- 2115-58 ManualDocument9 pages2115-58 ManualHowie DNo ratings yet
- K300 ML1400 Indexing Example v1 0 PDFDocument7 pagesK300 ML1400 Indexing Example v1 0 PDFEmerson Müller Juarez AvilaNo ratings yet
- SEER17Document3 pagesSEER17Daniel BenavidesNo ratings yet
- Car Elevators SpecDocument34 pagesCar Elevators Specmohammad ghassanNo ratings yet
- 02 - M580 Remote IODocument36 pages02 - M580 Remote IOSharon SanchezNo ratings yet
- 4 Basic Cnet IO ProductDocument18 pages4 Basic Cnet IO ProductJefferson CastrillonNo ratings yet
- elo4NL7WB66 DDocument8 pageselo4NL7WB66 DFrancisco SantanaNo ratings yet
- IRD1-T2: Transformer Differential Protection RelayDocument24 pagesIRD1-T2: Transformer Differential Protection RelayTaufiqtadNo ratings yet
- 1a-M6e OverviewDocument35 pages1a-M6e OverviewArshad.AliNo ratings yet
- 1.1 Switch Status (Transmitted) : Auxiliary Input / Output Status 1Document4 pages1.1 Switch Status (Transmitted) : Auxiliary Input / Output Status 1ass manNo ratings yet
- Ren Qs4a205 DST 20140413Document8 pagesRen Qs4a205 DST 20140413mymincraft678No ratings yet
- AS-01.01.071 Revised3Document22 pagesAS-01.01.071 Revised3AbdNo ratings yet
- DI1 Si210 - PDFDocument110 pagesDI1 Si210 - PDFQuang Pham Duy100% (1)
- Sub Operator Panel / SOP Remote Operator Panel / ROPDocument18 pagesSub Operator Panel / SOP Remote Operator Panel / ROPEduardoNo ratings yet
- TACLANE Quick Start ManualDocument26 pagesTACLANE Quick Start Manualautumnrazor5412100% (1)
- HardwareDocument74 pagesHardwareShreyash ButleNo ratings yet
- Product Data Sheet Rosemount 752 Foundation Fieldbus Remote Indicator en 73656Document16 pagesProduct Data Sheet Rosemount 752 Foundation Fieldbus Remote Indicator en 73656Arthur BastosNo ratings yet
- DIP5000 Teleprotection: Application NoteDocument5 pagesDIP5000 Teleprotection: Application NotehoneyNo ratings yet
- P2 V23079 Relay: 108-98002 Sept 06 Rev. D Ecoc: Jm10Document14 pagesP2 V23079 Relay: 108-98002 Sept 06 Rev. D Ecoc: Jm10Audio Semiconductores SACNo ratings yet
- SeminarLecture3 GOOSEDocument57 pagesSeminarLecture3 GOOSEMarco TrovóNo ratings yet
- Stator CW SOP - Docx-1Document12 pagesStator CW SOP - Docx-1SonratNo ratings yet
- Ams200 PDFDocument4 pagesAms200 PDFJair Jesús Cazares Rojas100% (2)
- Cutler ResumeDocument2 pagesCutler ResumeTom Cutler PerumeanNo ratings yet
- Colin Foote PHD Thesis March 2007Document326 pagesColin Foote PHD Thesis March 2007cfoote100% (3)
- SolidWorks Simulation Professional TrainingDocument104 pagesSolidWorks Simulation Professional TrainingAnonymous NonQwK3qL275% (4)
- U551Document16 pagesU551Faber Andres Vidal RuizNo ratings yet
- Neutral Conductor Sizing: Angelo Baggini - Angelo - Baggini@unibg - It Franco Bua - Franco - Bua@ecd - ItDocument16 pagesNeutral Conductor Sizing: Angelo Baggini - Angelo - Baggini@unibg - It Franco Bua - Franco - Bua@ecd - Itdheyab farajNo ratings yet
- MS Time SDN BHD Financial Statement 2021Document70 pagesMS Time SDN BHD Financial Statement 2021YuvarajNo ratings yet
- Method Statment For Bridge ConstructionDocument119 pagesMethod Statment For Bridge ConstructionSadek SinanNo ratings yet
- Ship Cast Off RopesDocument19 pagesShip Cast Off RopesSorin Thornblade MaresNo ratings yet
- How To Organize Information in English SentencesDocument3 pagesHow To Organize Information in English SentencesEugenia Romero RumínNo ratings yet
- General Rules For Flying A Drone in IndiaDocument2 pagesGeneral Rules For Flying A Drone in Indiakaushik.kailash5781No ratings yet
- Biochar Effects On Soil Compaction in Two Contrasting Soils: Universität Bremen University of AveiroDocument2 pagesBiochar Effects On Soil Compaction in Two Contrasting Soils: Universität Bremen University of AveiroLiv CBNo ratings yet
- Site Requirements GuideDocument138 pagesSite Requirements GuidemarisaranyaNo ratings yet
- Lecture39-Seismic Response of PilesDocument34 pagesLecture39-Seismic Response of PilesArun Goyal100% (1)
- H ParameterDocument32 pagesH ParameterG.Kishore Kumar Asst. Professor, ECE DepartmentNo ratings yet
- Comparacion Norma TIA-F Y TIA-GDocument30 pagesComparacion Norma TIA-F Y TIA-GAlioska Aguirre MendozaNo ratings yet
- Cover Conductor ReportDocument73 pagesCover Conductor ReportCarlosNo ratings yet
- Sapphire 2 GBDocument2 pagesSapphire 2 GBjuanNo ratings yet
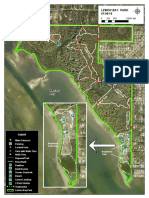
- Lemon Bay Park Florida Map 2018Document1 pageLemon Bay Park Florida Map 2018Kilty ONealNo ratings yet
- BS en 12697-3-2013 Bituminous Mixtures - Test Methods Part 3 Bitumen Recovery Rotary Evaporator.Document20 pagesBS en 12697-3-2013 Bituminous Mixtures - Test Methods Part 3 Bitumen Recovery Rotary Evaporator.ironfaceNo ratings yet
- 2.13 Specific Emissions and Emissions Index: M EI M M EI M M EI MDocument5 pages2.13 Specific Emissions and Emissions Index: M EI M M EI M M EI MOscar BallartaNo ratings yet
- Ucm SyllabusDocument2 pagesUcm Syllabusarun2386No ratings yet
- Computational Analysis (Lab3)Document3 pagesComputational Analysis (Lab3)Edwin Jesu DassNo ratings yet
- 173 Altek 334A SpecDocument4 pages173 Altek 334A SpecroozbehxoxNo ratings yet
- IntroducctionDocument34 pagesIntroducctionmelvin rodriguez vilchezNo ratings yet
- General Mechanical Questionnaire Without AnswersDocument7 pagesGeneral Mechanical Questionnaire Without AnswersDaniel Jimenez MerayoNo ratings yet
- Dokumen - Tips 1615 Tipperpdf5 P e C F C A T o N 5 Tata LPK 1615 TC Tipper Cummins 6bt s9 WaterDocument2 pagesDokumen - Tips 1615 Tipperpdf5 P e C F C A T o N 5 Tata LPK 1615 TC Tipper Cummins 6bt s9 WaterKhush DhakaNo ratings yet
- PIC24FJXXXGA1GB1 Families Flash Programming SpecificationDocument52 pagesPIC24FJXXXGA1GB1 Families Flash Programming SpecificationPiPo ChienNo ratings yet