You might also like
- Newton's Laws of Motion ExplainedDocument74 pagesNewton's Laws of Motion ExplainedMelody Mae O. Damole43% (7)
- Mat3320 Ass3 SolDocument2 pagesMat3320 Ass3 SolRichard BeardNo ratings yet
- Modeling and Control of a Flexible Joint ManipulatorDocument37 pagesModeling and Control of a Flexible Joint ManipulatorSantiago Garrido BullónNo ratings yet
- N8 .An-Introduction-to-Seismic-Isolation-R-Ivan-Skinnerl-William-H-Robinson-And-Graeme-H-McVerry PDFDocument190 pagesN8 .An-Introduction-to-Seismic-Isolation-R-Ivan-Skinnerl-William-H-Robinson-And-Graeme-H-McVerry PDFDaisy' Ruiz0% (1)
- Kureha Piezo 2017Document7 pagesKureha Piezo 2017Guillermo Huanes AlvanNo ratings yet
- Generating Random SignalsDocument56 pagesGenerating Random SignalssamfgNo ratings yet
- Cola TCM - MergedDocument9 pagesCola TCM - MergedJoão Victor ManoelNo ratings yet
- L10 FourierSeriesDocument11 pagesL10 FourierSeriesDylan15 CanalesNo ratings yet
- ch03 Sol FG 10thDocument83 pagesch03 Sol FG 10th김서진No ratings yet
- 2 - DeterminantsDocument50 pages2 - DeterminantsnhưNo ratings yet
- Math 2280 - Practice Exam 4Document7 pagesMath 2280 - Practice Exam 4Helbert PaatNo ratings yet
- Solution Problem 5Document5 pagesSolution Problem 5DeVillersSeciNo ratings yet
- 3 Problems Chapter 3: Quantum Mechanics of Electrons: 1 P 2 InxDocument9 pages3 Problems Chapter 3: Quantum Mechanics of Electrons: 1 P 2 InxallenNo ratings yet
- Linear System Response Matrix TransformationDocument4 pagesLinear System Response Matrix TransformationRehman SaleemNo ratings yet
- EECS4421Z Robotics Exam QuestionsDocument7 pagesEECS4421Z Robotics Exam QuestionsMooeez BellaamineNo ratings yet
- Solving Differential Equations With MatlabDocument20 pagesSolving Differential Equations With MatlabYon Jairo MontoyaNo ratings yet
- Chapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsDocument6 pagesChapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsSider HsiaoNo ratings yet
- Assignment 1 SolutionDocument11 pagesAssignment 1 SolutionaaNo ratings yet
- Problems and solutions for NCUMC 2018Document7 pagesProblems and solutions for NCUMC 2018Glory OlalereNo ratings yet
- Trigonometric Eq 1Document7 pagesTrigonometric Eq 1ayesha sheikhNo ratings yet
- 2 - DeterminantsDocument50 pages2 - DeterminantsPhạm Thiên LongNo ratings yet
- Homework 8Document4 pagesHomework 8bindumadhavibb2022No ratings yet
- Dr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielDocument4 pagesDr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielkevweNo ratings yet
- 1 The Lorentz TransformationDocument9 pages1 The Lorentz TransformationRayShefhNo ratings yet
- Full Download Fundamentals of Communication Systems 2nd Edition Proakis Solutions ManualDocument36 pagesFull Download Fundamentals of Communication Systems 2nd Edition Proakis Solutions Manualgiaourgaolbi23a100% (38)
- Math 677. Fall 2009. Homework #2 Solutions.: 1, 2 1 1 3, 4 2 2 1, 2 1, 2 1, 2 1 T 1 T 2 T 2 TDocument2 pagesMath 677. Fall 2009. Homework #2 Solutions.: 1, 2 1 1 3, 4 2 2 1, 2 1, 2 1, 2 1 T 1 T 2 T 2 TRodrigo KostaNo ratings yet
- Dr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielDocument4 pagesDr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielkevweNo ratings yet
- Dwnload Full Fundamentals of Communication Systems 2nd Edition Proakis Solutions Manual PDFDocument36 pagesDwnload Full Fundamentals of Communication Systems 2nd Edition Proakis Solutions Manual PDFbecurl.poitrel56ls100% (9)
- Math 257-316 PDE Formula Sheet - Final Exam: M It It M It ItDocument3 pagesMath 257-316 PDE Formula Sheet - Final Exam: M It It M It Itjokes NerdNo ratings yet
- Mathematical Statistics Final ExamDocument5 pagesMathematical Statistics Final ExamJohn Mark MaokeNo ratings yet
- Msc19key PDFDocument3 pagesMsc19key PDFManjay PalNo ratings yet
- MATH 219 Lecture NotesDocument6 pagesMATH 219 Lecture NotesHesapNo ratings yet
- Finding the Inverse of a Matrix Using Elementary Row OperationsDocument10 pagesFinding the Inverse of a Matrix Using Elementary Row OperationsAndy OrtizNo ratings yet
- 107 2 EM Midterm 2 SolDocument2 pages107 2 EM Midterm 2 SolAn ChaikekeNo ratings yet
- Mabe Exam 27 1 20-SolDocument8 pagesMabe Exam 27 1 20-SolNikola PilašNo ratings yet
- Trig Integrals GuideDocument19 pagesTrig Integrals Guideمصطفى احمدNo ratings yet
- Chapter 8Document50 pagesChapter 8John AshrafNo ratings yet
- Control Systems Theory and Design: Problem 1Document5 pagesControl Systems Theory and Design: Problem 1Luis CarvalhoNo ratings yet
- Sesion (S7)Document15 pagesSesion (S7)YAIR DAVID EGOAVIL TORRESNo ratings yet
- Rolles Theorem PDFDocument13 pagesRolles Theorem PDFAbhiNo ratings yet
- Solution Manual For Fundamentals of Communication Systems 2Nd Edition by Proakis Salehi Isbn 0133354857 9780133354850 Full Chapter PDFDocument46 pagesSolution Manual For Fundamentals of Communication Systems 2Nd Edition by Proakis Salehi Isbn 0133354857 9780133354850 Full Chapter PDFjudy.pierce330100% (12)
- AppuntiDocument34 pagesAppuntimarcoNo ratings yet
- Lecture 3 PDFDocument66 pagesLecture 3 PDFHà Anh Minh LêNo ratings yet
- Expectation MaximizationDocument19 pagesExpectation MaximizationKhyati ChhabraNo ratings yet
- Calculus for Engineers FormulaeDocument4 pagesCalculus for Engineers FormulaeKHÁNH VÂN DIỆPNo ratings yet
- Trigonometric equations solutionsDocument5 pagesTrigonometric equations solutionsADARSH KUMAR BEHERANo ratings yet
- ME 8692 FEA - WatermarkDocument126 pagesME 8692 FEA - WatermarkDHARMADURAI.P MEC-AP/AERONo ratings yet
- Week 2Document7 pagesWeek 2Anurag JoshiNo ratings yet
- Population Logistics Chemical EthanolDocument8 pagesPopulation Logistics Chemical EthanolTuling, Jose Jr., D.No ratings yet
- CML101 2020-21 I semester Minor 1 exam factsDocument4 pagesCML101 2020-21 I semester Minor 1 exam factsSarrahNo ratings yet
- Other Part of The Power Supply DesignDocument6 pagesOther Part of The Power Supply DesignKolawoleEbenezerNo ratings yet
- Maths - 24-Jan-23 - Shift 1Document20 pagesMaths - 24-Jan-23 - Shift 1Uju surtNo ratings yet
- Exact Finite Differences The Derivative On Non-Uniformly Spaced Partitions - Armando Martínez-Pérez - 25 July 2017Document11 pagesExact Finite Differences The Derivative On Non-Uniformly Spaced Partitions - Armando Martínez-Pérez - 25 July 2017RMolina65No ratings yet
- Example: Minimizef (X) 2 X: 11 21 12 22 1 N 2 N 11 21 12 22 1 N 2 NDocument7 pagesExample: Minimizef (X) 2 X: 11 21 12 22 1 N 2 N 11 21 12 22 1 N 2 Nejg ketselaNo ratings yet
- SeqSer GDocument8 pagesSeqSer GSamuel SmallmanNo ratings yet
- Trig Facts To MemorizeDocument1 pageTrig Facts To MemorizesanthiNo ratings yet
- OQM Lecture Note - Part 4 Big-M Method and Two-Phase Simplex MethodDocument14 pagesOQM Lecture Note - Part 4 Big-M Method and Two-Phase Simplex MethoddanNo ratings yet
- A Comment On Methods To Deal With Divergent Series and IntegralsDocument14 pagesA Comment On Methods To Deal With Divergent Series and Integralseljose1234100% (2)
- 5b. Mixed exam-style questions on exponentials and logarithms - AnswersDocument2 pages5b. Mixed exam-style questions on exponentials and logarithms - Answerswaleedkhan567799No ratings yet
- Engineering Analysis Homework 10Document9 pagesEngineering Analysis Homework 10AmritaNo ratings yet
- Final 2008 FDocument18 pagesFinal 2008 FMuhammad MurtazaNo ratings yet
- LU Decomposition Explained for Solving Linear SystemsDocument7 pagesLU Decomposition Explained for Solving Linear Systemssal27adamNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Optimumengineeringdesign Day3aDocument34 pagesOptimumengineeringdesign Day3aSantiago Garrido BullónNo ratings yet
- CI L11 OptimizationDocument30 pagesCI L11 OptimizationSantiago Garrido BullónNo ratings yet
- Exercise Dynamic ProgrammingDocument1 pageExercise Dynamic ProgrammingSantiago Garrido BullónNo ratings yet
- Control OptimoDocument132 pagesControl OptimoSantiago Garrido BullónNo ratings yet
- Feedback Linearization ControlDocument42 pagesFeedback Linearization ControlSantiago Garrido BullónNo ratings yet
- IC II L01 Transf Z S T Discreto V2englishDocument57 pagesIC II L01 Transf Z S T Discreto V2englishSantiago Garrido BullónNo ratings yet
- C I L1 Logica Fuzzy V2engDocument63 pagesC I L1 Logica Fuzzy V2engSantiago Garrido BullónNo ratings yet
- Fuzzy 1Document11 pagesFuzzy 1Santiago Garrido BullónNo ratings yet
- Lyapunov Stability Methods in Control EngineeringDocument22 pagesLyapunov Stability Methods in Control EngineeringSantiago Garrido BullónNo ratings yet
- Nonlinear ControlDocument28 pagesNonlinear ControlSantiago Garrido BullónNo ratings yet
- System IdentificationDocument23 pagesSystem IdentificationSantiago Garrido Bullón100% (2)
- Numerical Optimal Control: July 2011Document123 pagesNumerical Optimal Control: July 2011Santiago Garrido BullónNo ratings yet
- Fuzzy 3 Fuzzy Inference ProcessDocument17 pagesFuzzy 3 Fuzzy Inference ProcessSantiago Garrido BullónNo ratings yet
- Chapter 2 - Burl Optimal Quadratic Control: Islamic University of GazaDocument44 pagesChapter 2 - Burl Optimal Quadratic Control: Islamic University of GazaSantiago Garrido BullónNo ratings yet
- Introduction To Mobile Robotics - Burgard PDFDocument745 pagesIntroduction To Mobile Robotics - Burgard PDFSantiago Garrido BullónNo ratings yet
- Nonlinear SystemsDocument30 pagesNonlinear SystemsSantiago Garrido BullónNo ratings yet
- Optimal Quadratic Control L2Document35 pagesOptimal Quadratic Control L2Santiago Garrido BullónNo ratings yet
- A Simple Explanation of Why Lagrange Multipliers Works: Andrew Chamberlain, PH.DDocument13 pagesA Simple Explanation of Why Lagrange Multipliers Works: Andrew Chamberlain, PH.DSantiago Garrido BullónNo ratings yet
- Phase Plane Analysis: Glad & LjungDocument8 pagesPhase Plane Analysis: Glad & LjungSantiago Garrido BullónNo ratings yet
- The Maximum Principle and Hamilton Jacobi TheoryDocument40 pagesThe Maximum Principle and Hamilton Jacobi TheorySantiago Garrido BullónNo ratings yet
- LQR LectureDocument53 pagesLQR Lecturesuhaila_samsuriNo ratings yet
- Optimal Quadratic Control L2Document35 pagesOptimal Quadratic Control L2Santiago Garrido BullónNo ratings yet
- 6nlc RelayDocument4 pages6nlc RelaySantiago Garrido BullónNo ratings yet
- Control CourseDocument126 pagesControl CourseDang Hai NguyenNo ratings yet
- 5NLC MracDocument34 pages5NLC MracSantiago Garrido BullónNo ratings yet
- Chapter 2 - Burl Optimal Quadratic Control: Islamic University of GazaDocument44 pagesChapter 2 - Burl Optimal Quadratic Control: Islamic University of GazaSantiago Garrido BullónNo ratings yet
- U X F DT DX: Nonlinear ControlDocument11 pagesU X F DT DX: Nonlinear ControlSantiago Garrido BullónNo ratings yet
- Lyapunov Stability Theory:: Problem of Motion Stability, Includes Two Methods For Stability Analysis (The SoDocument25 pagesLyapunov Stability Theory:: Problem of Motion Stability, Includes Two Methods For Stability Analysis (The SoSantiago Garrido BullónNo ratings yet
- AGMU 09.1-Seismic Site Class DefinitionDocument15 pagesAGMU 09.1-Seismic Site Class DefinitiongustdlsNo ratings yet
- Mechanical Waves ExplainedDocument2 pagesMechanical Waves ExplainedcjNo ratings yet
- DENAIR Dry Oil Free PPT (DWW 55-315KW)Document15 pagesDENAIR Dry Oil Free PPT (DWW 55-315KW)GrumetcomNo ratings yet
- Unit 16 Thermionic Emission CroDocument3 pagesUnit 16 Thermionic Emission Croyusuke123456789No ratings yet
- Compact Blue-Green Lasers for OEM ApplicationsDocument41 pagesCompact Blue-Green Lasers for OEM Applicationsdpiehler@alphion.comNo ratings yet
- Phy PPT FinalDocument29 pagesPhy PPT FinalReck OnNo ratings yet
- Functional Products From Nitto 4.2016Document23 pagesFunctional Products From Nitto 4.2016Nguyễn Xuân ĐiệpNo ratings yet
- Thesis About Global Warming EffectsDocument8 pagesThesis About Global Warming Effectsgbxwghwb100% (2)
- D 6815 - 02 - Rdy4mtutmdiDocument11 pagesD 6815 - 02 - Rdy4mtutmdiM Mirza Abdillah PratamaNo ratings yet
- Excellent 1Document39 pagesExcellent 1John TauloNo ratings yet
- Properties of Matter QuizDocument55 pagesProperties of Matter QuizLemuel Glenn BautistaNo ratings yet
- Analysis of Beams Prestressed With Unbonded Internal or External Tendons 1Document21 pagesAnalysis of Beams Prestressed With Unbonded Internal or External Tendons 1Amin ZuraiqiNo ratings yet
- List of 13 Topics You Might See On Final ExamDocument47 pagesList of 13 Topics You Might See On Final Exambat.laughNo ratings yet
- Class XI Chemistry: States of Matter and Gas LawsDocument60 pagesClass XI Chemistry: States of Matter and Gas LawsKalpesh BishnoiNo ratings yet
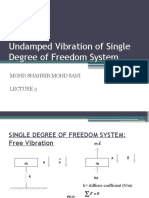
- Vibration of Single Degree SystemsDocument15 pagesVibration of Single Degree SystemsFong Wei JunNo ratings yet
- Cooling SystemDocument2 pagesCooling SystemSuharto ZuhriNo ratings yet
- Fluid Properties and Unit Conversions ProgramDocument13 pagesFluid Properties and Unit Conversions ProgramNawaz KhanNo ratings yet
- Mechanical Properties of Materials: Is Hooke's Law True?Document41 pagesMechanical Properties of Materials: Is Hooke's Law True?Mustafa ErolNo ratings yet
- 509 Light Planning en 12464-1Document1 page509 Light Planning en 12464-1Ko NandaNo ratings yet
- Calculation of Imbibition Relative Permeability For Two and Three Phase Flow From Rock PropertiesDocument8 pagesCalculation of Imbibition Relative Permeability For Two and Three Phase Flow From Rock PropertiesSweetbee LibyaNo ratings yet
- SUVAT - PracticeDocument2 pagesSUVAT - Practicemike simsonNo ratings yet
- Applying TIG Welding TechniquesDocument104 pagesApplying TIG Welding Techniqueshema_avraoNo ratings yet
- Class 11 and 12 Biology, Chemistry and Physics NotesDocument4 pagesClass 11 and 12 Biology, Chemistry and Physics NotesADARSHRAJ MOHAPATRANo ratings yet
- (Robert P. Benedict, Nicola A. Carlucci (Auth.) ) H (B-Ok - Xyz)Document198 pages(Robert P. Benedict, Nicola A. Carlucci (Auth.) ) H (B-Ok - Xyz)oğuz kağanNo ratings yet
- Statically Determinate Structures Problem Set AnalysisDocument15 pagesStatically Determinate Structures Problem Set AnalysisJassen Andriano RondinaNo ratings yet
- Unit IV Jet PropulsionDocument31 pagesUnit IV Jet PropulsionMuthuvel M100% (1)
- محاضرة (4) نسيجيةDocument6 pagesمحاضرة (4) نسيجيةمصطفــى أبـراهيـم محمــدNo ratings yet