You might also like
- Lab Activity 1.2 - DNA Extraction-1Document3 pagesLab Activity 1.2 - DNA Extraction-1alexander justin tanhuecoNo ratings yet
- Ethics Position PaperDocument8 pagesEthics Position Papercwise2100% (1)
- Sesq PDFDocument11 pagesSesq PDFClint CamNo ratings yet
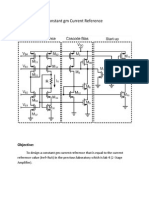
- Constant GM Current ReferenceDocument4 pagesConstant GM Current ReferenceGp GonzalesNo ratings yet
- Biochem COURSE SYLLABUSDocument10 pagesBiochem COURSE SYLLABUSSharmaine DurangoNo ratings yet
- Study Guide Unit 1.2 - Using Laws of Inheritance To Predict Genotypes and PhenotypesDocument30 pagesStudy Guide Unit 1.2 - Using Laws of Inheritance To Predict Genotypes and PhenotypesGraceNo ratings yet
- Macro Environmental FactorsDocument2 pagesMacro Environmental FactorsRellie CastroNo ratings yet
- Teaching Science in The Philippines - Why (And How) We Can Do BetterDocument5 pagesTeaching Science in The Philippines - Why (And How) We Can Do BetterAngely BarrionNo ratings yet
- Abp Dynamics Multiple Choice 2016-02-24Document10 pagesAbp Dynamics Multiple Choice 2016-02-24artsidartsyNo ratings yet
- Genetics Lesson PlanDocument4 pagesGenetics Lesson Plankayla08No ratings yet
- DLL - Trigo 7Document2 pagesDLL - Trigo 7Gel KilalaNo ratings yet
- Pretest in Research 2Document2 pagesPretest in Research 2Angelica BascoNo ratings yet
- The Home of The AshfallDocument3 pagesThe Home of The AshfallJoemel Mark Mamugay50% (2)
- Protein Chemistry Section ExamDocument9 pagesProtein Chemistry Section ExamJoelNo ratings yet
- Practical Research 2: Chapter 1: Nature of Inquiry and ResearchDocument4 pagesPractical Research 2: Chapter 1: Nature of Inquiry and ResearchJonwille Mark CastroNo ratings yet
- Grade 10 - Final Research PaperDocument72 pagesGrade 10 - Final Research PaperJoseph OliverNo ratings yet
- Turner SyndromeDocument12 pagesTurner Syndromenouval_iqbalNo ratings yet
- Compilation of Notes If Marijuana Will Be Legalized in The PhilippinesDocument42 pagesCompilation of Notes If Marijuana Will Be Legalized in The PhilippinesLajilaNo ratings yet
- Physics (Linear Momentum)Document19 pagesPhysics (Linear Momentum)slim_101No ratings yet
- Models of The AtomDocument4 pagesModels of The Atomakash100% (1)
- Module For General Chemistry 2Document28 pagesModule For General Chemistry 2DansNo ratings yet
- Hay InfusionDocument1 pageHay Infusioninnoaruta_22No ratings yet
- Ra 7925Document21 pagesRa 7925Jo MarNo ratings yet
- APA Citation ActivityDocument3 pagesAPA Citation ActivityShekinah Vingno LingcongNo ratings yet
- Position Paper (Ethics)Document3 pagesPosition Paper (Ethics)Clarence ViboraNo ratings yet
- Sip Group 4 Chapter 1Document6 pagesSip Group 4 Chapter 1markism RNNo ratings yet
- Research Paper For Science Division ExpoDocument13 pagesResearch Paper For Science Division ExpoJohnLloyd ClaveriaNo ratings yet
- Plant Growth Solutions LabDocument3 pagesPlant Growth Solutions Labmaria genio0% (1)
- Chapter 2Document9 pagesChapter 2Mar Di NgNo ratings yet
- Development of A Hydroelectric Mobile Phone ChargerDocument8 pagesDevelopment of A Hydroelectric Mobile Phone ChargerAudrey RoqueNo ratings yet
- Genetics) SyllabusDocument33 pagesGenetics) Syllabusb.duttaNo ratings yet
- Lesson 6Document12 pagesLesson 6Viv Tolosa SorianoNo ratings yet
- Parallel Forces Course Learning Outcome:: MODULE OF INSTRUCTIONDocument6 pagesParallel Forces Course Learning Outcome:: MODULE OF INSTRUCTIONYoo JungNo ratings yet
- Gen Chem 1 Q1 M4Document9 pagesGen Chem 1 Q1 M4Joselito UbaldoNo ratings yet
- Molality and MolarityDocument8 pagesMolality and MolarityAlex Baylosis Delina100% (1)
- Prodcut of Recombinat DNA TechnologyDocument9 pagesProdcut of Recombinat DNA TechnologySHOAIB NAVEEDNo ratings yet
- General Physics 2: Electric Charge and Coulomb's LawDocument7 pagesGeneral Physics 2: Electric Charge and Coulomb's LawMarlon TrinidadNo ratings yet
- Literature Review WorksheetDocument8 pagesLiterature Review Worksheetapi-486178870No ratings yet
- Dress Codes in School 1Document3 pagesDress Codes in School 1api-615375557No ratings yet
- Danilo Lesson PlanDocument19 pagesDanilo Lesson PlanDanilo Villanueva Jr.No ratings yet
- Intermolecular ForcesDocument7 pagesIntermolecular Forcesphils_skoreaNo ratings yet
- General Biology 2 Module 4 1Document16 pagesGeneral Biology 2 Module 4 1Mary Rose DomingoNo ratings yet
- Cell Transport ReviewerDocument9 pagesCell Transport ReviewerNa LuNo ratings yet
- 1 - Big Bang TheoryDocument20 pages1 - Big Bang TheoryIra Mae Santiago PunoNo ratings yet
- Problem Sets Week 9: Work Done by A Constant ForceDocument10 pagesProblem Sets Week 9: Work Done by A Constant Forcenics100% (1)
- Descriptive EssayDocument1 pageDescriptive Essayapi-262142985100% (1)
- Name: - Year & Section: - Score: - I-MULTIPLE CHOICE: Write The Letter of The Correct Answer in A Separate SheetDocument4 pagesName: - Year & Section: - Score: - I-MULTIPLE CHOICE: Write The Letter of The Correct Answer in A Separate SheetPrincess ZamoraNo ratings yet
- Gb2 Las q3 w1 GeneticsDocument14 pagesGb2 Las q3 w1 GeneticsAnn Clarisse OndianoNo ratings yet
- Combined Gas Law & Dalton's Law (G4)Document37 pagesCombined Gas Law & Dalton's Law (G4)Kesziah CalambaNo ratings yet
- Plant Physiology Course HandoutDocument3 pagesPlant Physiology Course HandoutAryaman MandhanaNo ratings yet
- 2nd Grading Periodical Papa ModingDocument10 pages2nd Grading Periodical Papa ModingCons Agbon Monreal Jr.No ratings yet
- Structure of ProteinDocument72 pagesStructure of ProteinSudipta MandolNo ratings yet
- Ultimate UPCAT Prep Ebook 2 PDFDocument235 pagesUltimate UPCAT Prep Ebook 2 PDFnabixxiNo ratings yet
- (HCI) HumanDocument50 pages(HCI) Humanmahi omaimaNo ratings yet
- STEM - Gen Chem 1 and 2 CG - With Tagged Sci EquipmentDocument23 pagesSTEM - Gen Chem 1 and 2 CG - With Tagged Sci EquipmentWichel Ann0% (1)
- Translational Equilibrium and FrictionDocument52 pagesTranslational Equilibrium and FrictionMariam HishamNo ratings yet
- Translational EquilibriumDocument18 pagesTranslational EquilibriumJmiehBaterinaNo ratings yet
- Contoh Soal RC PDFDocument23 pagesContoh Soal RC PDFIrfan Yahya IkhsanudinNo ratings yet
- Experiment No. 7 Bending Moment in Beams: Course Title: Lab Report #: Submitted To: Submitted By: Date of SubmissionDocument6 pagesExperiment No. 7 Bending Moment in Beams: Course Title: Lab Report #: Submitted To: Submitted By: Date of SubmissionMansoob BukhariNo ratings yet
- Passion ExhibitDocument1 pagePassion ExhibitRandy NatalNo ratings yet
- 5.2 The Future YouDocument3 pages5.2 The Future YouRandy NatalNo ratings yet
- 6.3 Final Course RequirementDocument3 pages6.3 Final Course RequirementRandy NatalNo ratings yet
- Final Course RequirementDocument3 pagesFinal Course RequirementRandy Natal50% (2)
- Passion ExhibitDocument1 pagePassion ExhibitRandy NatalNo ratings yet
- Final Course RequirementDocument2 pagesFinal Course RequirementRandy NatalNo ratings yet
- 4.7 EssayDocument4 pages4.7 EssayRandy Natal100% (1)
- 4.6 Map It OutDocument1 page4.6 Map It OutRandy NatalNo ratings yet
- 5.3 Taking ActionDocument1 page5.3 Taking ActionRandy NatalNo ratings yet
- 3.3 Love Your Calling With PassionDocument2 pages3.3 Love Your Calling With PassionRandy NatalNo ratings yet
- Basics of Hypothesis TestingDocument42 pagesBasics of Hypothesis TestingRandy NatalNo ratings yet
- KinematicDocument16 pagesKinematicRandy NatalNo ratings yet
- Resultant of Forces:: Maintaining Equilibrium or Changing MotionDocument68 pagesResultant of Forces:: Maintaining Equilibrium or Changing MotionRandy NatalNo ratings yet
- STATICSDocument33 pagesSTATICSRandy NatalNo ratings yet
- KinematicDocument16 pagesKinematicRandy NatalNo ratings yet
- Cell TheoryDocument27 pagesCell TheoryRandy NatalNo ratings yet
- Dcmotors601 0241Document42 pagesDcmotors601 0241Afrida Fazira MNo ratings yet
- Vehicle Dynamics: Transmission CalculationsDocument7 pagesVehicle Dynamics: Transmission Calculationsravikant sarswatNo ratings yet
- Tool Mechanical InjectorsDocument48 pagesTool Mechanical Injectorsferdyak1100% (2)
- Engineering: Unit 2 Science For EngineeringDocument18 pagesEngineering: Unit 2 Science For EngineeringDr-Syed Ali TarekNo ratings yet
- 11 Vol 1 and 2 Important Questions EM PDFDocument5 pages11 Vol 1 and 2 Important Questions EM PDFvvn natrajNo ratings yet
- Aipmt 2001Document16 pagesAipmt 2001GatiNo ratings yet
- MOTOARE SEM-MT - Technical - Data - Manual PDFDocument65 pagesMOTOARE SEM-MT - Technical - Data - Manual PDFalexandrubuduNo ratings yet
- Abutment Design ExampleDocument56 pagesAbutment Design Examplezrilek1No ratings yet
- Exam SolutionsDocument11 pagesExam SolutionsLacey Prestwood100% (1)
- Definition of Shaft:-: A) Shafts Subjected To Twisting Moment OnlyDocument4 pagesDefinition of Shaft:-: A) Shafts Subjected To Twisting Moment OnlyAnand ShindeNo ratings yet
- Pengembangan Dan Evaluasi Termal Pengering Drum Ganda Untuk Produk Makanan Siap Saji Dalam Mendukung Pencegahan StuntingDocument11 pagesPengembangan Dan Evaluasi Termal Pengering Drum Ganda Untuk Produk Makanan Siap Saji Dalam Mendukung Pencegahan StuntingAlumnitmpNo ratings yet
- II Mech - 03 - EE8353 - EDC - Unit 1 PDFDocument4 pagesII Mech - 03 - EE8353 - EDC - Unit 1 PDFPraveena GopiNo ratings yet
- OscillationsDocument29 pagesOscillationsTetsuya OkazakiNo ratings yet
- Section - Mathematical Modeling of Mechanical SystemsDocument13 pagesSection - Mathematical Modeling of Mechanical SystemsMandolinNo ratings yet
- Rod Cantilever TechniquesDocument6 pagesRod Cantilever TechniquesronnyNo ratings yet
- AS Unit G481: Mechanics: Definitions: Scalar: Magnitude Without DirectionDocument7 pagesAS Unit G481: Mechanics: Definitions: Scalar: Magnitude Without DirectionJamaliNo ratings yet
- WS XI PH Rotational Motion RollingDocument11 pagesWS XI PH Rotational Motion Rollingkaushik247No ratings yet
- Scrum Half1Document18 pagesScrum Half1Zarul ZahariNo ratings yet
- 3 Advanced Mechanics of Solids ME S4 B.tech KTU 2017Document3 pages3 Advanced Mechanics of Solids ME S4 B.tech KTU 2017Hari650No ratings yet
- 01.04.2018.PDF Wheel Nut OpenerDocument5 pages01.04.2018.PDF Wheel Nut OpenerTom SerojeNo ratings yet
- Sample PDF of MHT Cet Triumph PhysicDocument23 pagesSample PDF of MHT Cet Triumph PhysicPrathamesh MauryaNo ratings yet
- Tonus MuscularDocument12 pagesTonus MuscularRadu Cristian StuparNo ratings yet
- Center of GravityDocument7 pagesCenter of Gravityحنان أحمدNo ratings yet
- Moving Charges and MagnetismDocument15 pagesMoving Charges and Magnetismprakul varshneyNo ratings yet
- Astm D3702Document5 pagesAstm D3702jeigocNo ratings yet
- 25-01-2024 - SR - Super60 - Elite, Target & LIIT-BTs - Jee-Main-GTM-18 - Q.PAPERDocument22 pages25-01-2024 - SR - Super60 - Elite, Target & LIIT-BTs - Jee-Main-GTM-18 - Q.PAPERGravity blazeNo ratings yet
- Bowden1978 Theoretical Considerations of Headgear Therapy 1Document9 pagesBowden1978 Theoretical Considerations of Headgear Therapy 1solodont1No ratings yet
- Enkodery Akcesoria CNCDocument89 pagesEnkodery Akcesoria CNCjanusz_1025No ratings yet
- AP-C Objectives (From College Board Learning Objectives For AP Physics)Document3 pagesAP-C Objectives (From College Board Learning Objectives For AP Physics)Umar ShahNo ratings yet
- Design of Gravity LightDocument85 pagesDesign of Gravity LightAMIR MOHAMMEDNo ratings yet