You might also like
- Ch13 Solutions To Book ExamplesDocument14 pagesCh13 Solutions To Book Examplesjjooeeyycc54% (13)
- Ecu (Electronic Control Unit) (E28, E32) : 1) 2002 MODELDocument12 pagesEcu (Electronic Control Unit) (E28, E32) : 1) 2002 MODEL08088338100% (1)
- Design of Electrical Machine Unit 1 2 MarksDocument6 pagesDesign of Electrical Machine Unit 1 2 MarksVel MuruganNo ratings yet
- Tariff, Power Factor and Power Factor ImprovementDocument12 pagesTariff, Power Factor and Power Factor ImprovementnurliyanaNo ratings yet
- 6.1. Concept of Power FactorDocument10 pages6.1. Concept of Power FactormahaprabuasNo ratings yet
- IG3115C ClassicDocument2 pagesIG3115C ClassicPaul Abi NajemNo ratings yet
- Induction MotorDocument43 pagesInduction MotorAshvani ShuklaNo ratings yet
- Chapter 7 Induction Machines-EEE301Document96 pagesChapter 7 Induction Machines-EEE301DilekNo ratings yet
- Protection & SwitchgearDocument50 pagesProtection & SwitchgearvnrsamyNo ratings yet
- Tutorial 6 - Induction MotorDocument2 pagesTutorial 6 - Induction MotorMohdFirdausNo ratings yet
- DCMTDocument37 pagesDCMTGloria HolcombNo ratings yet
- 192 - EE8301, EE6401 Electrical Machines I - Question Bank 3Document15 pages192 - EE8301, EE6401 Electrical Machines I - Question Bank 3Kaleeswari SaraswathiNo ratings yet
- Frog Leg WindingDocument9 pagesFrog Leg WindingAbhijeet RedekarNo ratings yet
- Phasor Representation of ACDocument21 pagesPhasor Representation of ACKavitha NaikNo ratings yet
- Induction Machine ReportDocument24 pagesInduction Machine ReportSiddharth NandhanNo ratings yet
- Optimal Shunt Capacitor Placement for Reactive Power ImprovementDocument55 pagesOptimal Shunt Capacitor Placement for Reactive Power ImprovementKira Chakuri100% (1)
- DC Motor ObjectivesDocument13 pagesDC Motor ObjectivesAvik PoudelNo ratings yet
- Unit 19 Single - Phase Induction MotorsDocument4 pagesUnit 19 Single - Phase Induction MotorsKim Jeff BeringuelNo ratings yet
- Linear Solenoid GuideDocument20 pagesLinear Solenoid GuideAndrei ReventNo ratings yet
- DC Generator Magnetization CurveDocument5 pagesDC Generator Magnetization CurveM Kumar MarimuthuNo ratings yet
- (4-2) Synchronous GeneratorDocument35 pages(4-2) Synchronous Generatorfarah haniNo ratings yet
- Electrical Bus, Bar and Types of Bus, Bar Arrangements and Advantages and DisadvantagesDocument10 pagesElectrical Bus, Bar and Types of Bus, Bar Arrangements and Advantages and DisadvantagesAlan MuerongNo ratings yet
- 360 Topic 6 DC MachineDocument33 pages360 Topic 6 DC MachineAchsan ArfandiNo ratings yet
- Development of Electric Drives in Light Rail Transit (LRT) SystemDocument31 pagesDevelopment of Electric Drives in Light Rail Transit (LRT) SystemArjun Pratap Singh100% (1)
- Psoc Course FileDocument14 pagesPsoc Course Filecholleti sriramNo ratings yet
- Experiment 4 - Three Phase Uncontrolled RectifierDocument13 pagesExperiment 4 - Three Phase Uncontrolled RectifierAaaa DdddNo ratings yet
- Rotary and Linear Switched Reluctance MotorsDocument12 pagesRotary and Linear Switched Reluctance Motorskarthikeyan249100% (2)
- Special Electrical MachineDocument15 pagesSpecial Electrical MachineJesse Jones SeraspeNo ratings yet
- Generac - Gen Insulation ClassDocument4 pagesGenerac - Gen Insulation Class6609503100% (1)
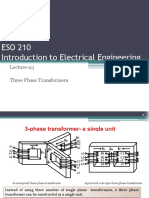
- Transformers - Three Phase TransformersDocument25 pagesTransformers - Three Phase TransformersDeepakDeep100% (1)
- HV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilDocument6 pagesHV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilAdnan AliNo ratings yet
- Tutorial 7Document3 pagesTutorial 7Dhivya NNo ratings yet
- Paralleling DC Generators and Armature ReactionDocument24 pagesParalleling DC Generators and Armature ReactionNoel Bacton100% (1)
- Fuzzy Logic Control of Three Phase Induction Motor: A ReviewDocument3 pagesFuzzy Logic Control of Three Phase Induction Motor: A ReviewInternational Journal of Innovative Science and Research Technology100% (1)
- Principles of Electrical Engineering Question BankDocument8 pagesPrinciples of Electrical Engineering Question BankUpender Rao SunkishalaNo ratings yet
- AC Series Motor Modifications for AC SupplyDocument15 pagesAC Series Motor Modifications for AC SupplyMani Balaji TNo ratings yet
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDocument5 pagesPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNo ratings yet
- Ee6401 Electrical Machines - IDocument19 pagesEe6401 Electrical Machines - ISindhujaSindhuNo ratings yet
- DC Machines: Parts of DC MachineDocument51 pagesDC Machines: Parts of DC MachineKUMARNo ratings yet
- EM II ProblemsDocument4 pagesEM II ProblemsTony StarkNo ratings yet
- AC Armature WindingDocument17 pagesAC Armature WindingusmanNo ratings yet
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringDocument4 pagesIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantNo ratings yet
- Difference Between Single Phase Wiring and Three Phase (Latest)Document14 pagesDifference Between Single Phase Wiring and Three Phase (Latest)shumwenjunNo ratings yet
- Electromechanical Energy Conversion II: Dr. Ali M. EltamalyDocument43 pagesElectromechanical Energy Conversion II: Dr. Ali M. EltamalyYacine BendjeddouNo ratings yet
- MCB vs MCCB vs ELCB vs RCCB: What's the DifferenceDocument5 pagesMCB vs MCCB vs ELCB vs RCCB: What's the Differencecurazaq100% (1)
- How To Size MCBDocument4 pagesHow To Size MCBpravin chawleNo ratings yet
- Assignment FMDocument22 pagesAssignment FMFasihah ArshadNo ratings yet
- DC Motor Lecture 3Document27 pagesDC Motor Lecture 3Fira tubeNo ratings yet
- Three PhaseDocument29 pagesThree PhaseBaquiran John Paul BaquiranNo ratings yet
- Electrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Document5 pagesElectrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Danial AkramNo ratings yet
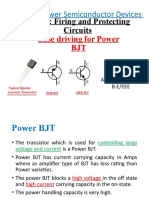
- Advanced Power BJT Base Driving CircuitsDocument16 pagesAdvanced Power BJT Base Driving CircuitsSachin SivaNo ratings yet
- Wires and Cables Used For Residential Electrical SystemsDocument3 pagesWires and Cables Used For Residential Electrical SystemsNurul ShathirahNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- AC MachinesDocument30 pagesAC MachinesAnonymous 5GBBc45No ratings yet
- Special - Electrical - Machines QBDocument25 pagesSpecial - Electrical - Machines QBVel MuruganNo ratings yet
- Tutorial 2 (Answer)Document9 pagesTutorial 2 (Answer)NAYAB HASSANo ratings yet
- Instruction Manual For Electrical Technology Laboratory Department of Electrical Engineering, IIT (ISM) DhanbadDocument4 pagesInstruction Manual For Electrical Technology Laboratory Department of Electrical Engineering, IIT (ISM) DhanbadSHUBHAM SINGHAL100% (1)
- Brushless DC MotorDocument3 pagesBrushless DC MotorSourav KumarNo ratings yet
- Using PQ Monitoring and Substation Relays for Fault LocationDocument7 pagesUsing PQ Monitoring and Substation Relays for Fault LocationkhaledchahineNo ratings yet
- Model Free Traveling Wave Based Fault Location Method For Series Compensated Transmission LineDocument10 pagesModel Free Traveling Wave Based Fault Location Method For Series Compensated Transmission LinekhaledchahineNo ratings yet
- Intro To Pumping SystemsDocument0 pagesIntro To Pumping SystemssatstarNo ratings yet
- Stepper PMDCDocument15 pagesStepper PMDCkhaledchahineNo ratings yet
- Pumps and Motors PDFDocument28 pagesPumps and Motors PDFபத்மநாபன் ஶ்ரீநிவாஸன்No ratings yet
- IEEE Spectrum Volume 33 Issue 8 1996 (Doi 10.1109/6.511737) Kassakian, J.G. Wolf, H.-C. Miller, J.M. Hurton, C.J. - Automotive Electrical Systems Circa 2005Document9 pagesIEEE Spectrum Volume 33 Issue 8 1996 (Doi 10.1109/6.511737) Kassakian, J.G. Wolf, H.-C. Miller, J.M. Hurton, C.J. - Automotive Electrical Systems Circa 2005khaledchahineNo ratings yet
- Demands For Better Economy More Electric Power Driving Multiple Higher VoltagesDocument6 pagesDemands For Better Economy More Electric Power Driving Multiple Higher VoltageskhaledchahineNo ratings yet
- Lecture1 - Introduction - RobustControlTheory PDFDocument136 pagesLecture1 - Introduction - RobustControlTheory PDFajayaghimireNo ratings yet
- Robust Stability Analysis of Systems with UncertaintiesDocument80 pagesRobust Stability Analysis of Systems with UncertaintiesTrần Khánh NguyênNo ratings yet
- Parametric Estimation of Ultra Wideband Radar TargetsDocument5 pagesParametric Estimation of Ultra Wideband Radar TargetskhaledchahineNo ratings yet
- Circulation 2008 McCord 1897 907Document12 pagesCirculation 2008 McCord 1897 907khaledchahineNo ratings yet
- A Unified Approach To The Assessment of Student Learning OutcomesDocument12 pagesA Unified Approach To The Assessment of Student Learning OutcomeskhaledchahineNo ratings yet
- Paper CLB ITSC2011 Final PDFDocument6 pagesPaper CLB ITSC2011 Final PDFkhaledchahineNo ratings yet
- Clark 1996Document6 pagesClark 1996khaledchahineNo ratings yet
- User's and Installation Guide UPS 40-160 kVA, 400V 50/60 HZ OutputDocument70 pagesUser's and Installation Guide UPS 40-160 kVA, 400V 50/60 HZ OutputPowertech Energia e TecnologiaNo ratings yet
- Senarai Mesin - LATESTDocument4 pagesSenarai Mesin - LATESTBaharu100% (1)
- Rayleigh PotDocument10 pagesRayleigh PotNikhilesh ShajiNo ratings yet
- HPS2D Operation ManualDocument33 pagesHPS2D Operation Manualsanjeewa12No ratings yet
- Manual Errores - HW9483057 EspDocument68 pagesManual Errores - HW9483057 EsprapeislNo ratings yet
- "Automatic Railway Crossing Gate Control ": A Project Report OnDocument80 pages"Automatic Railway Crossing Gate Control ": A Project Report Ondarshan_dharajiaNo ratings yet
- Relay Gre140 Catalog Gkp-99-12026 (Draft Rev0 0) PDFDocument25 pagesRelay Gre140 Catalog Gkp-99-12026 (Draft Rev0 0) PDFTruy Devid BuiNo ratings yet
- 4E-FE ECU pinout guideDocument6 pages4E-FE ECU pinout guideElectronica Mecatronica RasmusNo ratings yet
- EMA24AL AE InstallDocument2 pagesEMA24AL AE InstallzeljkoNo ratings yet
- (Lab Logo) : This Test Report Relates To The Test Sample Submitted and List of Documents AttachedDocument95 pages(Lab Logo) : This Test Report Relates To The Test Sample Submitted and List of Documents AttachedSakshi GawaiNo ratings yet
- Mod. AAC-1/EV: Modular Educational Systems For Drives of Ac MotorsDocument2 pagesMod. AAC-1/EV: Modular Educational Systems For Drives of Ac Motorslusoegyi 1919No ratings yet
- Impulse User ManualDocument7 pagesImpulse User Manualmagnet0No ratings yet
- Panasonic nnsd297s Service Manual 120889Document31 pagesPanasonic nnsd297s Service Manual 120889Pan SairaNo ratings yet
- Solar Inverters: MODELS: PM-1500SL-12 PM-1500SL-24 Specifications: MODELS: PM-3000SL-12 PM-3000SL-24 SpecificationsDocument1 pageSolar Inverters: MODELS: PM-1500SL-12 PM-1500SL-24 Specifications: MODELS: PM-3000SL-12 PM-3000SL-24 SpecificationsKishore Krishna100% (1)
- Product Manual Spd200k Spd300k Series A272 328 Solahd en 7439270Document20 pagesProduct Manual Spd200k Spd300k Series A272 328 Solahd en 7439270LamakNo ratings yet
- Catalogo Fusibles FusarcDocument20 pagesCatalogo Fusibles Fusarcmonik_atabaresNo ratings yet
- PANASONIC LIFE SOLUTIONS PRICELIST FOR MCB AND MCCBDocument7 pagesPANASONIC LIFE SOLUTIONS PRICELIST FOR MCB AND MCCBElectrical JKFMNo ratings yet
- Criteria For Selecting A Residual-Current Device: ContentDocument11 pagesCriteria For Selecting A Residual-Current Device: ContentNemanja ĐurkovićNo ratings yet
- 530B Trimanual PDFDocument56 pages530B Trimanual PDFJuan Pablo CruzNo ratings yet
- Instrumentation Earthing - Types & Principle - InstrumentationToolsDocument11 pagesInstrumentation Earthing - Types & Principle - InstrumentationToolsJalal AlbadriNo ratings yet
- MDX Encoder and MDX Resolver - Leroy Somer - 2017Document8 pagesMDX Encoder and MDX Resolver - Leroy Somer - 2017Manuel OrtegaNo ratings yet
- File 20230707 203258 43yc4Document33 pagesFile 20230707 203258 43yc4NhươngNo ratings yet
- Bill of Materials: Item Qty Reference Part Description Manufacturer Manufacturer Part Number Digikey Part NoDocument4 pagesBill of Materials: Item Qty Reference Part Description Manufacturer Manufacturer Part Number Digikey Part Noulin nuha abdinNo ratings yet
- DatasheetDocument4 pagesDatasheetNaresh KumarNo ratings yet
- Trihal b0bk 12 KV - enDocument2 pagesTrihal b0bk 12 KV - enEkoFujisyahMaulwantoNo ratings yet
- Why Transformer Does Not Work On DC Supply Instead of ACDocument4 pagesWhy Transformer Does Not Work On DC Supply Instead of ACAHMED YOUSEFNo ratings yet
- TelegramDocument20 pagesTelegramVani telluriNo ratings yet
- RF Capacitance Type Level TransmitterDocument2 pagesRF Capacitance Type Level Transmitteraamer6789No ratings yet