You might also like
- Lab 5 - Pelton TurbineDocument3 pagesLab 5 - Pelton TurbineChuck CooleyNo ratings yet
- Useful Motor FormulasDocument5 pagesUseful Motor FormulasFERNANDONo ratings yet
- Electric Motors and Drives: Key ConceptsDocument30 pagesElectric Motors and Drives: Key ConceptsJiyuan JiaNo ratings yet
- Brake Test On DC Shunt MachineDocument9 pagesBrake Test On DC Shunt MachineNagendrababu VasaNo ratings yet
- Useful Formulas MotorDocument9 pagesUseful Formulas Motormanojrawat21No ratings yet
- 390 MotorDocument14 pages390 MotorAlex MoiseNo ratings yet
- Single Phase Induction Motor Working PrincipleDocument10 pagesSingle Phase Induction Motor Working PrincipleCarlo Pañares MaglasangNo ratings yet
- Fluid Machinery: Hydraulic TurbinesDocument16 pagesFluid Machinery: Hydraulic Turbinesmathews munyumbeNo ratings yet
- DC Motor Separately Excited Series and ShuntDocument44 pagesDC Motor Separately Excited Series and ShuntCristyl GuiebNo ratings yet
- DC Motor Three Phase Half & Full Controlled DrivesDocument5 pagesDC Motor Three Phase Half & Full Controlled DrivesUjjal DeyNo ratings yet
- Motor Calculations and Power BudgetsDocument25 pagesMotor Calculations and Power BudgetsRoshan ShanmughanNo ratings yet
- Machine Elements SummaryDocument24 pagesMachine Elements SummaryjelmerNo ratings yet
- EE 25 LAB Activity 04Document9 pagesEE 25 LAB Activity 04Vanvan BitonNo ratings yet
- Et Cs PDFDocument33 pagesEt Cs PDFsahil borichaNo ratings yet
- Module 4 CDocument25 pagesModule 4 CBu DakNo ratings yet
- Induction Motors Pre LabDocument7 pagesInduction Motors Pre LabShay SinghNo ratings yet
- AC Machines ReportDocument19 pagesAC Machines ReportKrishna0% (1)
- EDA (MCT) Lab ManualDocument32 pagesEDA (MCT) Lab ManualThanigaigriezmann GkNo ratings yet
- Friction: Syed Shaheer Uddin Ahmed Lecturer, MPE AustDocument19 pagesFriction: Syed Shaheer Uddin Ahmed Lecturer, MPE Austচৌদ্দগ্রাম পৌর আমজনতাNo ratings yet
- 电磁电机-5 直流驱动Document32 pages电磁电机-5 直流驱动Jiyuan Jia100% (1)
- Caluculation Required For Accelertn TimeDocument2 pagesCaluculation Required For Accelertn Timech prabuNo ratings yet
- Clutch DesignDocument7 pagesClutch DesignGökhan YazarNo ratings yet
- 8 - Load Test On Im1Document9 pages8 - Load Test On Im1anitha paramasivamNo ratings yet
- Acdc - DC Motor - Lecture Notes 5Document30 pagesAcdc - DC Motor - Lecture Notes 5Cllyan ReyesNo ratings yet
- Direct Online StarterDocument17 pagesDirect Online Starterදුප්පත් කොල්ලාNo ratings yet
- Motor Sizing Made EasyDocument3 pagesMotor Sizing Made EasyTurbosMixerNo ratings yet
- Motor Sizing CalculationDocument3 pagesMotor Sizing CalculationRizwan TahirNo ratings yet
- Speed Control of Induction Motors: Synchronous Speed Ns 120 F/PDocument6 pagesSpeed Control of Induction Motors: Synchronous Speed Ns 120 F/Pmohamed shalabyNo ratings yet
- FORMULASDocument2 pagesFORMULASelias aguirreNo ratings yet
- Me 142l b39 Reyes Exp 5Document10 pagesMe 142l b39 Reyes Exp 5Cyrus ReyesNo ratings yet
- Wind Power 2Document56 pagesWind Power 2MD AASIFNo ratings yet
- TR Safety All-EDocument17 pagesTR Safety All-EHassani Taha YassineNo ratings yet
- Lab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIIDocument12 pagesLab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIImishtinilNo ratings yet
- G.H. Raisoni College of EngineeringDocument34 pagesG.H. Raisoni College of Engineeringnikhil_0401No ratings yet
- DC Motor DrivesDocument39 pagesDC Motor DrivesAnuar Nuafzan100% (1)
- Spring 2001 Physics 2048 Test 3 Solutions: Problem 1. (Short Answer: 15 Points)Document5 pagesSpring 2001 Physics 2048 Test 3 Solutions: Problem 1. (Short Answer: 15 Points)yanzcomey comeyNo ratings yet
- Gear TrainDocument8 pagesGear TrainP RAVI KUMARNo ratings yet
- Seatwork No.7: Aaron Enrique M. Magsino ME - 5301Document5 pagesSeatwork No.7: Aaron Enrique M. Magsino ME - 5301Adrian Kim MagsinoNo ratings yet
- EquationsDocument2 pagesEquationsRahul ShindeNo ratings yet
- SRPM 120 F PDocument32 pagesSRPM 120 F PVidyesh KulalNo ratings yet
- Date: Expt. No: 11 Name of The Experiment: Determination of Value of Capacitor For Maximum Starting Torque of Capacitor Split PhaseDocument3 pagesDate: Expt. No: 11 Name of The Experiment: Determination of Value of Capacitor For Maximum Starting Torque of Capacitor Split Phase23 - 017 - Md. Imran HossainNo ratings yet
- Lab 5: Pelton Turbine ENGR 3471 - Fluid Mechanics LaboratoryDocument4 pagesLab 5: Pelton Turbine ENGR 3471 - Fluid Mechanics LaboratoryMD Al-AminNo ratings yet
- ELE 3305 Power Supply DesignDocument23 pagesELE 3305 Power Supply DesignMuhammad SalisNo ratings yet
- Load Test DC MotorDocument6 pagesLoad Test DC MotorAngelNo ratings yet
- How To Calculate Wheel Torque From Engine TorqueDocument7 pagesHow To Calculate Wheel Torque From Engine TorqueDevakumarNo ratings yet
- DC MachinesDocument10 pagesDC Machinesprince ian cruzNo ratings yet
- Flight Performance-Part 1 (Steady Level Flight) Min and Max SpeedDocument5 pagesFlight Performance-Part 1 (Steady Level Flight) Min and Max SpeedGCVishnuKumarNo ratings yet
- Example 2: Crane (Hoist Application) : Braking Calculation 03Document3 pagesExample 2: Crane (Hoist Application) : Braking Calculation 03A Tai TrieuNo ratings yet
- C2 - Actuators: TransmissionDocument9 pagesC2 - Actuators: TransmissionJorge RodriguezNo ratings yet
- Electrical ForumalsDocument75 pagesElectrical ForumalsDinesh Raj G80% (10)
- EE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALDocument58 pagesEE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALjk100% (1)
- Banking of Highway Curves:: W G V R W V GRDocument10 pagesBanking of Highway Curves:: W G V R W V GRRetro GamerNo ratings yet
- Precious Plastic - Info On MotorsDocument15 pagesPrecious Plastic - Info On MotorsWillemVandeputNo ratings yet
- DC To DC Choppers SummaryDocument21 pagesDC To DC Choppers SummaryjeyyelramosNo ratings yet
- Three Phase IMDocument17 pagesThree Phase IMmohamedNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Easy(er) Electrical Principles for General Class Ham License (2015-2019)From EverandEasy(er) Electrical Principles for General Class Ham License (2015-2019)Rating: 5 out of 5 stars5/5 (1)
- 1.2.5.AK Clock Signals - The555TimerDocument5 pages1.2.5.AK Clock Signals - The555TimerPeter CatizoneNo ratings yet
- 1 1 4 Componentidentificationanalog 2Document20 pages1 1 4 Componentidentificationanalog 2api-348898646No ratings yet
- Activity 2.1.3 AOI Logic Implementation: Ac+A C+Ab CDocument5 pagesActivity 2.1.3 AOI Logic Implementation: Ac+A C+Ab Charpr jackNo ratings yet
- 1 2 6 Ak Understandinganalogdesign RNGDocument4 pages1 2 6 Ak Understandinganalogdesign RNGapi-29080471950% (2)
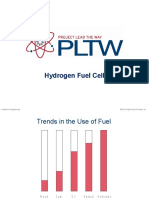
- Hydrogen Fuel Cell: © 2012 Project Lead The Way, Inc. Principles of EngineeringDocument23 pagesHydrogen Fuel Cell: © 2012 Project Lead The Way, Inc. Principles of Engineeringharpr jackNo ratings yet
- 1 2 5 A WorkenergypowerDocument18 pages1 2 5 A Workenergypowerapi-325609741No ratings yet
- 2 1 5AOILogicImplementationDocument6 pages2 1 5AOILogicImplementationGoran Mateiasevici0% (2)
- Pendiq User Manual enDocument64 pagesPendiq User Manual enMartin JoseNo ratings yet
- Price List 2014: Valid From 01.04.2014, Prices in Euro, Excluding VAT. Previous Price Lists Will Become InvalidDocument106 pagesPrice List 2014: Valid From 01.04.2014, Prices in Euro, Excluding VAT. Previous Price Lists Will Become InvalidarifNo ratings yet
- 125 128Document4 pages125 128Majdi JerbiNo ratings yet
- Electrical Machine 7-26-2016Document94 pagesElectrical Machine 7-26-2016Engr. Raheel khanNo ratings yet
- LSRetailDataDirector UserGuideDocument89 pagesLSRetailDataDirector UserGuideRock Lee60% (5)
- Was Bali 2005Document786 pagesWas Bali 2005RoyOrtegaNo ratings yet
- Differendial Pressure Flow MetersDocument1 pageDifferendial Pressure Flow Metersborn2engineerNo ratings yet
- Online Dating GuideDocument101 pagesOnline Dating Guidewoodyallen78No ratings yet
- Basf TapesDocument3 pagesBasf TapesZoran TevdovskiNo ratings yet
- Ram SAP MM Class StatuscssDocument15 pagesRam SAP MM Class StatuscssAll rounderzNo ratings yet
- Gas LiftDocument4 pagesGas LiftSteve MarfissiNo ratings yet
- Equipment Sheet: Cable Laying VesselDocument2 pagesEquipment Sheet: Cable Laying Vesselsitu brestNo ratings yet
- Excellent Hex Key Wrench: English VersionDocument54 pagesExcellent Hex Key Wrench: English Versionmg pyaeNo ratings yet
- Elementos ElectrónicosDocument9 pagesElementos ElectrónicosKratt DeividNo ratings yet
- Zara Marketing Mix Four PsDocument3 pagesZara Marketing Mix Four PsHaniyeh ShojaeiNo ratings yet
- Community Development and Umbrella BodiesDocument20 pagesCommunity Development and Umbrella Bodiesmoi5566No ratings yet
- Pump Sizing SpreadsheetDocument2 pagesPump Sizing Spreadsheetandrew rachmanNo ratings yet
- Much NeedeDocument11 pagesMuch NeedeRijul KarkiNo ratings yet
- Certificate of Analysis - Certified Reference Material: Cetyl PalmitateDocument6 pagesCertificate of Analysis - Certified Reference Material: Cetyl PalmitateRachel McArdleNo ratings yet
- Mode D'emploi 2-43 Operating Instructions 44-85 Manual de Instrucciones 86-127Document43 pagesMode D'emploi 2-43 Operating Instructions 44-85 Manual de Instrucciones 86-127Oleksii_ServiceNo ratings yet
- Introduction To Major Crop FieldsDocument32 pagesIntroduction To Major Crop FieldsCHANDANINo ratings yet
- Indian Pharmaceutical Industry: The Changing Dynamics: April 2016Document26 pagesIndian Pharmaceutical Industry: The Changing Dynamics: April 2016payal joshiNo ratings yet
- Em8 1session2.2Document25 pagesEm8 1session2.2DreamCodmNo ratings yet
- Personal Styling Service-Contract - No WatermarkDocument5 pagesPersonal Styling Service-Contract - No WatermarkLexine Emille100% (1)
- International Journal of Plasticity: Dong Phill Jang, Piemaan Fazily, Jeong Whan YoonDocument17 pagesInternational Journal of Plasticity: Dong Phill Jang, Piemaan Fazily, Jeong Whan YoonGURUDAS KARNo ratings yet
- PTL Ls Programme HandbookDocument34 pagesPTL Ls Programme Handbooksalak946290No ratings yet
- GitHub TrainingDocument21 pagesGitHub Trainingcyberfox786No ratings yet
- 144-WARA AD 2.1 To AD 2.24 AIRAC AIP AMDT 125 26 JAN 23Document9 pages144-WARA AD 2.1 To AD 2.24 AIRAC AIP AMDT 125 26 JAN 23latsar kusumoNo ratings yet
- 12 December 1996Document116 pages12 December 1996Monitoring Times100% (1)
- Kalokal Barangay Highway HillsDocument35 pagesKalokal Barangay Highway HillsDixie MirandaNo ratings yet