You might also like
- EE 25 LAB Activity 03Document7 pagesEE 25 LAB Activity 03Vanvan BitonNo ratings yet
- 8 - Load Test On Im1Document9 pages8 - Load Test On Im1anitha paramasivamNo ratings yet
- Electrical Machines ExperimentDocument3 pagesElectrical Machines ExperimentSimranjit100% (1)
- Experiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Document6 pagesExperiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Baba YagaNo ratings yet
- EE6512-Electrical Machines Laboratory - II-1000431998-EM II Lab Manual 2018Document122 pagesEE6512-Electrical Machines Laboratory - II-1000431998-EM II Lab Manual 2018dinesh jNo ratings yet
- Electrical Machines-I Lab Manual R16 Modified PDFDocument83 pagesElectrical Machines-I Lab Manual R16 Modified PDFsk ibrahimNo ratings yet
- Experiment 2Document9 pagesExperiment 2عبدالعزيز شقحانNo ratings yet
- Machines1 Exp 5Document6 pagesMachines1 Exp 5Lover BoyNo ratings yet
- MT8311 - Electrical Machines ManualDocument20 pagesMT8311 - Electrical Machines ManualArivanandanNo ratings yet
- EE6365 EE Lab ManualDocument58 pagesEE6365 EE Lab Manualjk100% (1)
- Electrical Machines II LAB MANUALDocument45 pagesElectrical Machines II LAB MANUALram kumarNo ratings yet
- Beeel 1a2Document12 pagesBeeel 1a2Dr. S MuthukumarNo ratings yet
- Uthd LabDocument5 pagesUthd Labanirban0% (1)
- Brake Test On DC Shunt MachineDocument9 pagesBrake Test On DC Shunt MachineNagendrababu VasaNo ratings yet
- Circuit Diagram: U19Ee306 - Electrical Machines - I LaboratoryDocument16 pagesCircuit Diagram: U19Ee306 - Electrical Machines - I LaboratorySanthoshNo ratings yet
- AIM: To Evaluate The Performance and Plot Torque-Slip Characteristic of Three-Phase Induction Motor Using Circle DiagramDocument8 pagesAIM: To Evaluate The Performance and Plot Torque-Slip Characteristic of Three-Phase Induction Motor Using Circle Diagramsiddhansh jainNo ratings yet
- 2 Machine LabDocument4 pages2 Machine LabManoj GuptaNo ratings yet
- s5 Lab Manual Full FinalDocument45 pagess5 Lab Manual Full FinalananyadeviashokkumarNo ratings yet
- EMSL Cycle 2 ExptsDocument25 pagesEMSL Cycle 2 ExptsVarun ChoudharyNo ratings yet
- Circuit Diagram: Kprient/Eee/Ee8361 Electrical Engineering LaboratoryDocument6 pagesCircuit Diagram: Kprient/Eee/Ee8361 Electrical Engineering LaboratorykavineshNo ratings yet
- Exp - 4. Determination of Series & Shunt Motor Characteristic CurveDocument5 pagesExp - 4. Determination of Series & Shunt Motor Characteristic CurveMd KaziNo ratings yet
- Wa0009Document6 pagesWa0009TanmayNo ratings yet
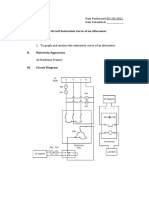
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- Machine 2 Lab Exp 7Document8 pagesMachine 2 Lab Exp 7Ahmed Bin MustafaNo ratings yet
- EMS Lab Manual-2Document68 pagesEMS Lab Manual-2M SamarNo ratings yet
- EEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run MotorDocument8 pagesEEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run Motorsalad.ass420420No ratings yet
- 4.5 Electric Motors PDFDocument5 pages4.5 Electric Motors PDFmufti.adhigunaNo ratings yet
- EE8411-Electrical Machines Laboratory-II-Lab Manual PDFDocument80 pagesEE8411-Electrical Machines Laboratory-II-Lab Manual PDFkrishnandrk100% (2)
- Machine - Lab Manual Merged PDFDocument14 pagesMachine - Lab Manual Merged PDFMubin LikhonNo ratings yet
- Direct Load Test On A DC Shunt MotorDocument5 pagesDirect Load Test On A DC Shunt MotorYAKALA RAVIKUMARNo ratings yet
- Machine Lab CombineDocument38 pagesMachine Lab Combinelakha ramNo ratings yet
- Emd 34Document14 pagesEmd 34Rusyaidi UmarNo ratings yet
- Three Phase Induction Motor ExperimentDocument21 pagesThree Phase Induction Motor ExperimentKarthik GanjiNo ratings yet
- Exp 1 N 2Document16 pagesExp 1 N 2mallikarjunbpatilNo ratings yet
- Experiment 1Document7 pagesExperiment 1عبدالعزيز شقحانNo ratings yet
- EE6512-Electrical Machines LaboratoryDocument82 pagesEE6512-Electrical Machines LaboratoryGopinath B L NaiduNo ratings yet
- Ac Motors Ii ManualDocument46 pagesAc Motors Ii ManualKaleru ManideepkumarNo ratings yet
- Load Characteristics of D.C Series Motor 1-Object:: D D R L ADocument7 pagesLoad Characteristics of D.C Series Motor 1-Object:: D D R L Aمالك المجيديNo ratings yet
- Traction Simulation Example Using ETrax Analysis.Document44 pagesTraction Simulation Example Using ETrax Analysis.veemandal100% (2)
- Electrical Engineering Lab Manual For II Mech Part IDocument54 pagesElectrical Engineering Lab Manual For II Mech Part IArivumani80% (5)
- Brake Test On Three Phase Induction MotorDocument31 pagesBrake Test On Three Phase Induction MotorLalam Hari CharanNo ratings yet
- Binder 1Document48 pagesBinder 1deepanshu rajputNo ratings yet
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDocument63 pagesJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNo ratings yet
- EM-II FinalDocument57 pagesEM-II FinalAtchyut Satya KumarNo ratings yet
- CascadedDocument4 pagesCascadedshruthisankar4No ratings yet
- Service Manual SDG13 150S, As-3b1,3a5,3a6,3a7 (1) NSG-0036Document69 pagesService Manual SDG13 150S, As-3b1,3a5,3a6,3a7 (1) NSG-0036Yè WințNo ratings yet
- Sizing The Array Battery and Inverter in An Off Grid System V4 220819Document85 pagesSizing The Array Battery and Inverter in An Off Grid System V4 220819oeseyasinNo ratings yet
- Exp 2 (Load Test On Three Phase Im)Document6 pagesExp 2 (Load Test On Three Phase Im)Adarsh Singh100% (1)
- Me 2209 Electrical Engineering Lab ManualDocument45 pagesMe 2209 Electrical Engineering Lab ManualSai Karthi100% (1)
- EXPERIMENT8 IDocument12 pagesEXPERIMENT8 IAbhay KotnalaNo ratings yet
- Energy Meter With Circuit-WDocument4 pagesEnergy Meter With Circuit-Wkrishnareddy_chintalaNo ratings yet
- Determination of DC Machine Efficiency by Back-To-Back TestDocument4 pagesDetermination of DC Machine Efficiency by Back-To-Back TestMaulinduNo ratings yet
- Electrical Machines Laboratory - 2Document7 pagesElectrical Machines Laboratory - 2sanjuNo ratings yet
- Electrical Machines Lab ManualDocument41 pagesElectrical Machines Lab Manualsohaib hashmatNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power Electronics: Lecture Notes of Power Electronics CourseFrom EverandPower Electronics: Lecture Notes of Power Electronics CourseNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- AC Machines Single PhaseDocument11 pagesAC Machines Single PhaseVanvan BitonNo ratings yet
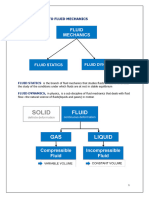
- Module 2 Fluiid StaticsDocument4 pagesModule 2 Fluiid StaticsVanvan BitonNo ratings yet
- AC-Machines-Induction-Motor-2Document12 pagesAC-Machines-Induction-Motor-2Vanvan BitonNo ratings yet
- EcosystemDocument39 pagesEcosystemVanvan BitonNo ratings yet
- Introduction To ResearchDocument43 pagesIntroduction To ResearchVanvan BitonNo ratings yet
- M1 Me12 Notes Rev00Document4 pagesM1 Me12 Notes Rev00Vanvan BitonNo ratings yet
- EEMath 12 Lesson 6Document7 pagesEEMath 12 Lesson 6Vanvan BitonNo ratings yet
- Warranties Liabilities Patents Bids and InsuranceDocument39 pagesWarranties Liabilities Patents Bids and InsuranceVanvan Biton100% (1)
- CHAPTER 2 - Research ProcessDocument32 pagesCHAPTER 2 - Research ProcessVanvan BitonNo ratings yet
- Ece38 LDRDocument4 pagesEce38 LDRVanvan BitonNo ratings yet
- National Building CodeDocument141 pagesNational Building CodeVanvan Biton100% (1)
- EEMath 12 Lesson 5Document7 pagesEEMath 12 Lesson 5Vanvan BitonNo ratings yet
- EEMath 12 Chapter 3Document4 pagesEEMath 12 Chapter 3Vanvan BitonNo ratings yet
- EEMath 12 Lesson 4Document6 pagesEEMath 12 Lesson 4Vanvan BitonNo ratings yet
- Performance Base RateDocument31 pagesPerformance Base RateVanvan BitonNo ratings yet
- Wholesale Electricity Spot MarketDocument147 pagesWholesale Electricity Spot MarketVanvan BitonNo ratings yet
- Power Supply AgreementDocument15 pagesPower Supply AgreementVanvan BitonNo ratings yet
- Philippine Fire Protection CodeDocument94 pagesPhilippine Fire Protection CodeVanvan BitonNo ratings yet
- Selection Re Use and Recycling of MaterialsDocument28 pagesSelection Re Use and Recycling of MaterialsVanvan BitonNo ratings yet
- Feed in TariffFIT 1Document45 pagesFeed in TariffFIT 1Vanvan BitonNo ratings yet
- Biton Speaker SpeechDocument2 pagesBiton Speaker SpeechVanvan BitonNo ratings yet
- Guidelines For Energy Conserving Design - PPT Version 1Document62 pagesGuidelines For Energy Conserving Design - PPT Version 1Reymart ManablugNo ratings yet
- Felongco, Llave, Libo-On, Superales - Ece 32 Lab 3Document9 pagesFelongco, Llave, Libo-On, Superales - Ece 32 Lab 3Vanvan BitonNo ratings yet
- AC Machines Alternators 1Document16 pagesAC Machines Alternators 1Vanvan BitonNo ratings yet
- RPMS 2023 Biton FinalDocument52 pagesRPMS 2023 Biton FinalVanvan BitonNo ratings yet
- Bsee 3a Quiz Results in Magna CartaDocument1 pageBsee 3a Quiz Results in Magna CartaVanvan BitonNo ratings yet
- Nano MaterialsDocument42 pagesNano MaterialsVanvan Biton100% (1)
- AC Machines Alternators 2Document10 pagesAC Machines Alternators 2Vanvan BitonNo ratings yet
- Boarding HouseDocument1 pageBoarding HouseVanvan BitonNo ratings yet
- Ee 20 LabDocument3 pagesEe 20 LabVanvan BitonNo ratings yet
- HTR India - Products - Wire Wound Resistors - Symmetry Resistors - HSRC (English)Document3 pagesHTR India - Products - Wire Wound Resistors - Symmetry Resistors - HSRC (English)crplzNo ratings yet
- Approved Vendor List As On 23.02.2021Document69 pagesApproved Vendor List As On 23.02.2021Surya ElectronicsNo ratings yet
- Energy Charges May2015 For SOC'sDocument20 pagesEnergy Charges May2015 For SOC'svicente tanNo ratings yet
- A Bylaw of The City of Saskatoon Regulating and Controlling The Installation of Electrical Equipment in The City of SaskatoonDocument12 pagesA Bylaw of The City of Saskatoon Regulating and Controlling The Installation of Electrical Equipment in The City of SaskatoonEmin KültürelNo ratings yet
- 70 Interesting CircuitsDocument21 pages70 Interesting CircuitsIliescu CristianNo ratings yet
- PS48300 2900Document77 pagesPS48300 2900trananh7020000No ratings yet
- 0105 - Segen Doc Update-Web PDFDocument6 pages0105 - Segen Doc Update-Web PDFJustinNo ratings yet
- WeidCat11 - Circuit-SurgeProtection 2016 - v3Document190 pagesWeidCat11 - Circuit-SurgeProtection 2016 - v3Roger MantillaNo ratings yet
- SDI204S02 Magnefix Short Circuit Indicator Brochure 3994 074A PDFDocument8 pagesSDI204S02 Magnefix Short Circuit Indicator Brochure 3994 074A PDFPradeep RajanNo ratings yet
- Power Electronics Notes PDFDocument263 pagesPower Electronics Notes PDFNithyaNo ratings yet
- Load Schedule - Open ElectricalDocument9 pagesLoad Schedule - Open ElectricalAlaa RamadanNo ratings yet
- Field Visit To Sunkoshi HydropowerDocument12 pagesField Visit To Sunkoshi HydropowerDipak100% (1)
- 4 Main Types of Insulator Used in Overhead LinesDocument9 pages4 Main Types of Insulator Used in Overhead LinesArvind GangwarNo ratings yet
- Fort Erie Fort Erie: Electricity RatesDocument3 pagesFort Erie Fort Erie: Electricity RatesjunelpalingcodNo ratings yet
- Three-Phase Grid-Tie Inverters: Conext CLDocument2 pagesThree-Phase Grid-Tie Inverters: Conext CLAdewale BamgbadeNo ratings yet
- 5.modeling of Three Phase Self Excited Induction Generator (26-32)Document7 pages5.modeling of Three Phase Self Excited Induction Generator (26-32)ijcctsNo ratings yet
- Final Report Solar Grass CutterDocument35 pagesFinal Report Solar Grass CutterHARSHAD PATEL70% (43)
- Ca Relays: Features Typical ApplicationsDocument6 pagesCa Relays: Features Typical ApplicationsJaimecolina2004No ratings yet
- Star 325W 345W: 5BB-Monocrystalline PV Module CHSM6612M Series CHSM6612M/HV SeriesDocument2 pagesStar 325W 345W: 5BB-Monocrystalline PV Module CHSM6612M Series CHSM6612M/HV SerieseccmaNo ratings yet
- DC50DDocument2 pagesDC50DbarbastylNo ratings yet
- 12 Pulse Rectifier PDFDocument8 pages12 Pulse Rectifier PDFBhanu ThestarNo ratings yet
- Symmetra PX 100 KW: Scalable From 10 KW To 100 KWDocument8 pagesSymmetra PX 100 KW: Scalable From 10 KW To 100 KWJesus Enrique AnayaNo ratings yet
- 7KT1663 Datasheet enDocument4 pages7KT1663 Datasheet enmarquesrafaelNo ratings yet
- PDF ON Electrical EngineeringDocument19 pagesPDF ON Electrical EngineeringJamaica MinandangNo ratings yet
- Footstep Power Generation Using Piezoelectric SensorsDocument7 pagesFootstep Power Generation Using Piezoelectric SensorsBelayneh Tadesse100% (1)
- 8200 MotecDocument3 pages8200 Motecyera1No ratings yet
- Phase Sequence Relays, 200 - 500 V AC, 50/60 HZ Part No. EMR6-F500-G-1 Catalog No. 184789 Eaton Catalog No. EMR6-F500-G-1Document3 pagesPhase Sequence Relays, 200 - 500 V AC, 50/60 HZ Part No. EMR6-F500-G-1 Catalog No. 184789 Eaton Catalog No. EMR6-F500-G-1quangp4No ratings yet
- 22 MM Push Buttons XB4 Electrical Components: Table 19.89: Body/Mounting CollarDocument2 pages22 MM Push Buttons XB4 Electrical Components: Table 19.89: Body/Mounting CollarMohammed AbdelsalamNo ratings yet
- Electricity Meter RecordDocument7 pagesElectricity Meter RecordIbrahim Azif (Velo)No ratings yet
- Chapter-2 - AC Circuits - MG HusseinDocument32 pagesChapter-2 - AC Circuits - MG Husseinضياء بن احمد الكباريNo ratings yet