You might also like
- Vibration TransducerDocument7 pagesVibration TransducerPrakash Kumar100% (1)
- MechatronicsDocument61 pagesMechatronicsSajitha ManuNo ratings yet
- Introduction To DC Machine: by Dr. Shubhobrata RudraDocument129 pagesIntroduction To DC Machine: by Dr. Shubhobrata RudraBhabani sankar KishanNo ratings yet
- UNIT - 3-Sensors and Machine VisionDocument19 pagesUNIT - 3-Sensors and Machine VisionM.Saravana Kumar..M.ENo ratings yet
- OIE 751 ROBOTICS Unit 3 Class 2 (12-9-2020)Document15 pagesOIE 751 ROBOTICS Unit 3 Class 2 (12-9-2020)MICHEL RAJNo ratings yet
- Unit 2 Overview of Sensors, Transducers and Their Characteristics SpecificationsDocument87 pagesUnit 2 Overview of Sensors, Transducers and Their Characteristics SpecificationsSahilNo ratings yet
- (Magneto Optic Current Transducer) : Visit To DownloadDocument23 pages(Magneto Optic Current Transducer) : Visit To Downloadjijo thomasNo ratings yet
- Fault Detection in TM LineDocument25 pagesFault Detection in TM Linenaveen gNo ratings yet
- Lec 3 Displacement MeasurmentDocument38 pagesLec 3 Displacement MeasurmentHaftamu HilufNo ratings yet
- Cathode Ray OscilloscopeDocument17 pagesCathode Ray OscilloscopeLochan DhayaniNo ratings yet
- Magneto Optic Current TransformerDocument21 pagesMagneto Optic Current Transformershivam guptaNo ratings yet
- Optical Instrument Transformers For EHV SubstationsS 0910Document28 pagesOptical Instrument Transformers For EHV SubstationsS 0910vijaykrishnatennetiNo ratings yet
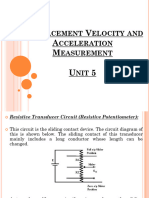
- Unit 5 Displacement, Velocity and Acceleration MeasurementDocument26 pagesUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7No ratings yet
- ICS Lab ManualDocument28 pagesICS Lab Manualashok_abclNo ratings yet
- Different Instruments - 2018Document99 pagesDifferent Instruments - 2018kaneeshaNo ratings yet
- Chapter 2 and 3: by HenokDocument52 pagesChapter 2 and 3: by Henokenok henaNo ratings yet
- Motion Control Feedback DeviceDocument20 pagesMotion Control Feedback DeviceZyzerull SaadNo ratings yet
- INDUSTRIAL ELECTRONICS-Course ContentDocument62 pagesINDUSTRIAL ELECTRONICS-Course ContentramprabhakarjNo ratings yet
- Sensors and ActuatorsDocument109 pagesSensors and ActuatorsDr-Amit Kumar Singh100% (1)
- Universal Current Sensor SaiDocument20 pagesUniversal Current Sensor SaiVenkata SaiNo ratings yet
- Different Instruments 2019Document99 pagesDifferent Instruments 2019AnjaliNo ratings yet
- TransducerDocument11 pagesTransducerRohit WayamNo ratings yet
- Cs SeminarDocument15 pagesCs SeminarMoti GamachuNo ratings yet
- Different Instruments 2018Document99 pagesDifferent Instruments 2018harshitNo ratings yet
- Robotics 6Document35 pagesRobotics 6nadiaNo ratings yet
- Eddy Probe System On The Basis of New Technology: FT L C L I T UDocument6 pagesEddy Probe System On The Basis of New Technology: FT L C L I T UNatthaphon NaosookNo ratings yet
- INDUSTRIAL ELECTRONICS-Course ContentDocument60 pagesINDUSTRIAL ELECTRONICS-Course ContentramprabhakarjNo ratings yet
- Ir Intruder Alarm: Maharana Pratap Group of Institutions, KanpurDocument17 pagesIr Intruder Alarm: Maharana Pratap Group of Institutions, Kanpurraman dwivediNo ratings yet
- Q2 Transducer SensorDocument264 pagesQ2 Transducer SensormarycrisbanayNo ratings yet
- Wireless Mobile ChargerDocument33 pagesWireless Mobile ChargerAditya MahajanNo ratings yet
- Optical Current Transformer: Class: TE Div. BDocument16 pagesOptical Current Transformer: Class: TE Div. BSahil ParateNo ratings yet
- 01 Sensors PDFDocument68 pages01 Sensors PDFNimsiri AbhayasingheNo ratings yet
- Power System Protection & Recent Trends by JDM - LatestDocument152 pagesPower System Protection & Recent Trends by JDM - Latestraajesh692% (12)
- Solution of Sensor and Instrumentation - KOE-034Document38 pagesSolution of Sensor and Instrumentation - KOE-034Aviral TaraNo ratings yet
- 7transducers SensorsDocument40 pages7transducers SensorsJack OneNo ratings yet
- 12.automatic Railway Track Crack Detecting VehicleDocument45 pages12.automatic Railway Track Crack Detecting VehicleWORLD360No ratings yet
- Assignment: Topic:-MODULE-VI Control System Components andDocument61 pagesAssignment: Topic:-MODULE-VI Control System Components andAmit TiwaryNo ratings yet
- 505 - Lec 10 PDFDocument36 pages505 - Lec 10 PDFUdara DissanayakeNo ratings yet
- MAINTOPIC Displacement MeasurementDocument43 pagesMAINTOPIC Displacement MeasurementLoreto CorderoNo ratings yet
- Module 2Document117 pagesModule 2Achsah K VijuNo ratings yet
- LVDT WhitePaperDocument3 pagesLVDT WhitePaperdetrutamiNo ratings yet
- Stepper MotorsDocument47 pagesStepper MotorsGyan KirtiNo ratings yet
- Control System ComponentsDocument29 pagesControl System Componentsshreemanti0% (1)
- U2 ISA MinorDocument44 pagesU2 ISA MinorjeyrajiNo ratings yet
- Assignment: Topic:-MODULE-VI Control System Components andDocument61 pagesAssignment: Topic:-MODULE-VI Control System Components andAmit TiwaryNo ratings yet
- Signal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBDocument7 pagesSignal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBsakthisriniNo ratings yet
- Measurement & Intrumentation: Made By: Engr. Danish Arif SiddiqiDocument52 pagesMeasurement & Intrumentation: Made By: Engr. Danish Arif SiddiqiMuhammad Usama Sharaf SAAFINo ratings yet
- Control Theory 31 PDFDocument44 pagesControl Theory 31 PDFAmit TiwaryNo ratings yet
- Actuator, Sensor, Control SystemDocument59 pagesActuator, Sensor, Control SystemBudi SusistoNo ratings yet
- Displacement, Velocity & Acceleration SensorsDocument103 pagesDisplacement, Velocity & Acceleration SensorsMarey Morsy100% (2)
- Sensors and Transducers UNIT-IIDocument84 pagesSensors and Transducers UNIT-IITamilnesan PNo ratings yet
- Optical Current TransformerDocument22 pagesOptical Current TransformerchallaramcharanreddyNo ratings yet
- Universal Current SensorsDocument21 pagesUniversal Current SensorsKarthik SD67% (6)
- Introduction To DC MachineDocument134 pagesIntroduction To DC MachineBharat SinghNo ratings yet
- Automotive Sensors and Actuators PDFDocument61 pagesAutomotive Sensors and Actuators PDFDeepak NaikNo ratings yet
- Seminar Project LVDT: - To Study The Basics, ConstructionDocument9 pagesSeminar Project LVDT: - To Study The Basics, ConstructionNaeem SaifNo ratings yet
- 04 Remote Sensing and IndicationDocument17 pages04 Remote Sensing and IndicationFurkan DuruNo ratings yet
- Basics of Electrical Theory: Mochammad Ariyanto, ST, MTDocument48 pagesBasics of Electrical Theory: Mochammad Ariyanto, ST, MTMukhammad FauzyNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- High Voltage DC Transmission (HVDC)Document29 pagesHigh Voltage DC Transmission (HVDC)ronak verma100% (1)
- 1) Theory 2) Problems in Propagation Waves. 3) Problems in AntennaDocument7 pages1) Theory 2) Problems in Propagation Waves. 3) Problems in AntennaÔng Bụt100% (1)
- XII Holidays Homework 2022-2023Document14 pagesXII Holidays Homework 2022-2023Vidhi SharmaNo ratings yet
- Exp Section-ADocument10 pagesExp Section-ABilal MalikNo ratings yet
- Standard Hydrogen Electrode, SHE: © 2017 Pearson Education, LTDDocument7 pagesStandard Hydrogen Electrode, SHE: © 2017 Pearson Education, LTDWilfredNo ratings yet
- SEE 3433 Electrical Machines: Classification of DC Machines DC Generators - Separately Excited - Armature ReactionDocument22 pagesSEE 3433 Electrical Machines: Classification of DC Machines DC Generators - Separately Excited - Armature ReactionMonirul IslamNo ratings yet
- Toshiba 46rv530u SM (ET)Document16 pagesToshiba 46rv530u SM (ET)titoritomexNo ratings yet
- Transformer Insulation Classes: Test Your KnowDocument9 pagesTransformer Insulation Classes: Test Your KnowLiton Kumar BiswasNo ratings yet
- Magnetic Compass - Terrestrial Magnetism - PPT NotesDocument42 pagesMagnetic Compass - Terrestrial Magnetism - PPT NotesAnkit Maurya100% (1)
- Digital Protection Coupler - Rev 1Document5 pagesDigital Protection Coupler - Rev 1Anand SNo ratings yet
- Pioneer s-w160-s-k Powered Subwoofer prt140 2006 SMDocument19 pagesPioneer s-w160-s-k Powered Subwoofer prt140 2006 SMmykhaylyuk.dmutroNo ratings yet
- User Manual EPC48601800-F3 Outdoor Power SystemDocument53 pagesUser Manual EPC48601800-F3 Outdoor Power SystemThịnh NguyễnNo ratings yet
- Physics Investigatory Project Common Base TransistorDocument13 pagesPhysics Investigatory Project Common Base TransistorKishore BhaskarNo ratings yet
- LM 230Document4 pagesLM 230wmqelmen8978No ratings yet
- ADE Chapter 1Document60 pagesADE Chapter 1Eric LokeNo ratings yet
- MA TST Scope Webinar 2019Document39 pagesMA TST Scope Webinar 2019Alex LuzNo ratings yet
- Deh 1900r/Xu/Ew5Document64 pagesDeh 1900r/Xu/Ew5roca9oNo ratings yet
- Antenne A704521R0v06 DatasheetDocument1 pageAntenne A704521R0v06 DatasheetStefan SchettNo ratings yet
- Physics Notes Chapter - 12 ElectrostaticsDocument18 pagesPhysics Notes Chapter - 12 ElectrostaticsranaateeqNo ratings yet
- TNB Electricity Supply Application Handbook ESAHDocument130 pagesTNB Electricity Supply Application Handbook ESAHnasbiwm100% (1)
- PT 2399Document11 pagesPT 2399Ruggero StellaNo ratings yet
- Design and Implementation of A High-Efficiency OnBoard Battery Charger For Electric Vehicles WithDocument6 pagesDesign and Implementation of A High-Efficiency OnBoard Battery Charger For Electric Vehicles Withrock starNo ratings yet
- Percut 200Document186 pagesPercut 200Tecnovi CoporationNo ratings yet
- Circuito Eléctrico de Aire AcondicionadoDocument2 pagesCircuito Eléctrico de Aire AcondicionadoAlejandro AlvarezNo ratings yet
- Emc Modeling SeminarDocument5 pagesEmc Modeling SeminarSujoy BiswasNo ratings yet
- SuperconductorsDocument31 pagesSuperconductorsnitibodhe100% (1)
- Light Emitting Diode - Design PrinciplesDocument46 pagesLight Emitting Diode - Design Principlesapi-19807868No ratings yet
- Installation Manual (PR215 216 517 03)Document36 pagesInstallation Manual (PR215 216 517 03)Jkevin John Capada DardoNo ratings yet
- Aircraft Electrical SystemsDocument73 pagesAircraft Electrical Systemsdhirajpatil5559763100% (4)
- 40tps12a Ir PDFDocument7 pages40tps12a Ir PDFmei jonieNo ratings yet