You might also like
- Scotch Yoke Hacksaw Sriram Engg ReportDocument67 pagesScotch Yoke Hacksaw Sriram Engg ReportChockalingam Athilingam100% (1)
- Design of Hydraulic Platform LiftDocument31 pagesDesign of Hydraulic Platform LiftzetseatNo ratings yet
- Air Brake PROJECT REPORTDocument52 pagesAir Brake PROJECT REPORTChockalingam Athilingam72% (18)
- Twin Spindle Auto Drilling MachineDocument10 pagesTwin Spindle Auto Drilling MachineSan SuryaNo ratings yet
- Sand Slinger MC Pneumatic 2016 VeltechDocument47 pagesSand Slinger MC Pneumatic 2016 VeltechChockalingam AthilingamNo ratings yet
- Automatic Double Axis Welding Machine7Document4 pagesAutomatic Double Axis Welding Machine7ieee4mybusinessonly50% (2)
- Creating a One-Piece Flow and Production Cell: Just-in-time Production with Toyota’s Single Piece FlowFrom EverandCreating a One-Piece Flow and Production Cell: Just-in-time Production with Toyota’s Single Piece FlowRating: 4 out of 5 stars4/5 (1)
- Rotate Robo PneuDocument4 pagesRotate Robo PneuChockalingam AthilingamNo ratings yet
- ABS 53dipping ReviewDocument2 pagesABS 53dipping ReviewChockalingam AthilingamNo ratings yet
- Tin Crushing Pneumatic ControlDocument3 pagesTin Crushing Pneumatic ControlChockalingam AthilingamNo ratings yet
- Abs 127two - Axes - Drill 2016 ReviewDocument3 pagesAbs 127two - Axes - Drill 2016 ReviewChockalingam AthilingamNo ratings yet
- Abs127two - Axes - Drill 2012 IgnovDocument3 pagesAbs127two - Axes - Drill 2012 IgnovChockalingam AthilingamNo ratings yet
- Automatic Bar Feeding Mechanism For Cutting MachineDocument2 pagesAutomatic Bar Feeding Mechanism For Cutting Machineieee4mybusinessonlyNo ratings yet
- Pneumatic Conveyor Ignov 2012Document4 pagesPneumatic Conveyor Ignov 2012Chockalingam AthilingamNo ratings yet
- Automatic Rain Operated WiperDocument12 pagesAutomatic Rain Operated WiperManan Bakshi25% (4)
- Mini Projects Title Sowkath Ali Contact: 9843175088, 9786290890Document18 pagesMini Projects Title Sowkath Ali Contact: 9843175088, 9786290890balaNo ratings yet
- Automatic Bottling Plant Using PLCDocument2 pagesAutomatic Bottling Plant Using PLCChockalingam AthilingamNo ratings yet
- PC Based Remote Material Handler For Industrial Application: SynopsisDocument4 pagesPC Based Remote Material Handler For Industrial Application: SynopsisKarthik SrinivasNo ratings yet
- Fabrication of Automatic Pneumatic Clamping IgnovDocument7 pagesFabrication of Automatic Pneumatic Clamping IgnovChockalingam AthilingamNo ratings yet
- Injection Molding Robotic ArmDocument11 pagesInjection Molding Robotic ArmYogi Bhimani0% (1)
- Automation in Manufacturing Unit-1Document58 pagesAutomation in Manufacturing Unit-1Krishna MurthyNo ratings yet
- Abs 9fabrication of Four Axes MaterialDocument2 pagesAbs 9fabrication of Four Axes MaterialChockalingam AthilingamNo ratings yet
- Automatic Rain Operated WiperDocument12 pagesAutomatic Rain Operated WiperifyNo ratings yet
- Design and Fabrication Project: Fabrication of Pneumatic Vice With JackDocument18 pagesDesign and Fabrication Project: Fabrication of Pneumatic Vice With JackTamil SelvanNo ratings yet
- Automatic Rain Wiper SystemDocument11 pagesAutomatic Rain Wiper Systemhhmanish25% (4)
- Abs 114pneumatic Controlled PVC Pipe Cutting Device 2012Document2 pagesAbs 114pneumatic Controlled PVC Pipe Cutting Device 2012Chockalingam AthilingamNo ratings yet
- My Paper (Repaired)Document53 pagesMy Paper (Repaired)Joe SmithNo ratings yet
- Automatic Hydro Pneumatic Jack: AbstractDocument3 pagesAutomatic Hydro Pneumatic Jack: AbstractRushikesh BadgujarNo ratings yet
- Design and Fabrication of Hydraulic PullerDocument4 pagesDesign and Fabrication of Hydraulic Pullerieee4mybusinessonlyNo ratings yet
- Review PaperDocument7 pagesReview PaperRoch RonaldoNo ratings yet
- Bottling Plant PLC 2019Document4 pagesBottling Plant PLC 2019Chockalingam AthilingamNo ratings yet
- Experiment No. 2: (Course Code: 2ME502)Document17 pagesExperiment No. 2: (Course Code: 2ME502)Kartik aminNo ratings yet
- Lab Report 11Document8 pagesLab Report 11razakhan5114No ratings yet
- Car Parking Ssystecar Parking SystemDocument3 pagesCar Parking Ssystecar Parking SystemChockalingam AthilingamNo ratings yet
- 177.hydraulic LiftDocument4 pages177.hydraulic LiftIyappanNo ratings yet
- 3 2 2 P 604764a9e8de5 FileDocument13 pages3 2 2 P 604764a9e8de5 FileKunal AhiwaleNo ratings yet
- Construction of A Prototype of A Peaches in Syrup Dosing MachineDocument13 pagesConstruction of A Prototype of A Peaches in Syrup Dosing Machinecristian granadaNo ratings yet
- Final ReportDocument11 pagesFinal ReportSheerazNo ratings yet
- Conveyor Operated RobotDocument6 pagesConveyor Operated RobotIyappanNo ratings yet
- Conveyor For Quality ControlDocument6 pagesConveyor For Quality ControlGajanan100% (2)
- Hydraulic Lift For Lifting Heavy Materials: Project Report OnDocument15 pagesHydraulic Lift For Lifting Heavy Materials: Project Report OnTribhuvan SharmaNo ratings yet
- SPH 2 KM234 Car Hydraulic Jack Using Internal Car Battery PDFDocument4 pagesSPH 2 KM234 Car Hydraulic Jack Using Internal Car Battery PDFMohan ReddyNo ratings yet
- Design & Fabrication of Double Acting Hacksaw MachineDocument9 pagesDesign & Fabrication of Double Acting Hacksaw MachineRajaKoduru80% (5)
- Electropneumatic Belt Conveyor 2015Document3 pagesElectropneumatic Belt Conveyor 2015Chockalingam AthilingamNo ratings yet
- PPTDocument43 pagesPPTHamedRaza100% (1)
- AutomationDocument6 pagesAutomationnavketsharma6280No ratings yet
- Chapter1-Introduction To Automation PDFDocument29 pagesChapter1-Introduction To Automation PDFAbdul Razzi86% (7)
- Automatic Built-In Hydraulic JackDocument27 pagesAutomatic Built-In Hydraulic JackAyush ShrivastavaNo ratings yet
- Design and Fabrication of A Remote ContrDocument14 pagesDesign and Fabrication of A Remote ContrAbdulkarim Odeh MuhammadNo ratings yet
- Automatic Pneumatic High Speed Sheet Cutting MachineDocument3 pagesAutomatic Pneumatic High Speed Sheet Cutting Machineieee4mybusinessonly100% (1)
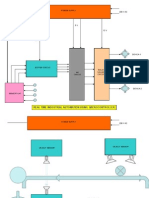
- Power Supply 230 V AC: Real Time Industrial Automation Using MicrocontrollerDocument7 pagesPower Supply 230 V AC: Real Time Industrial Automation Using Microcontrollersherrinjerrin23No ratings yet
- Automation in Ring Spinning Machines-KTTMDocument24 pagesAutomation in Ring Spinning Machines-KTTMkathirvelus94080% (1)
- Design and Fabrication of Step Feeder Automation MDocument10 pagesDesign and Fabrication of Step Feeder Automation MJesslyne CheniaNo ratings yet
- Line Following RobotDocument5 pagesLine Following RobotsathishNo ratings yet
- Mini Project: Automatic Reverse Breaking SystemDocument11 pagesMini Project: Automatic Reverse Breaking SystemRuba VigneshNo ratings yet
- ElectroDocument28 pagesElectroRick James RojasNo ratings yet
- UNIT-1 Hydraulic and Pneumatic DrivesDocument56 pagesUNIT-1 Hydraulic and Pneumatic DrivesChetuNo ratings yet
- 18BT030203 - Abhishek (A&R Lab)Document23 pages18BT030203 - Abhishek (A&R Lab)abhishek bhardwajNo ratings yet
- Automatic Car Washing System: P.B.Patel, S.V.Rokade, P.S.TujareDocument5 pagesAutomatic Car Washing System: P.B.Patel, S.V.Rokade, P.S.TujareSaad Ahmed100% (1)
- Automatic Car Washing System: P.B.Patel, S.V.Rokade, P.S.TujareDocument5 pagesAutomatic Car Washing System: P.B.Patel, S.V.Rokade, P.S.TujareSaad AhmedNo ratings yet
- Electro Pneumatic TrainerDocument4 pagesElectro Pneumatic TrainerleeNo ratings yet
- RCB Bhad Mein JayeDocument3 pagesRCB Bhad Mein Jayeavengerscaptain2656No ratings yet
- Fabrication of Pneumatic Mobile Crane Mechanical ProjectDocument2 pagesFabrication of Pneumatic Mobile Crane Mechanical ProjectUr FriendNo ratings yet
- Box Shift Conveyor 2018Document2 pagesBox Shift Conveyor 2018Chockalingam AthilingamNo ratings yet
- Project Titles NC 2018 Cs Fea RDDocument9 pagesProject Titles NC 2018 Cs Fea RDChockalingam AthilingamNo ratings yet
- 6.design and Fabrication of Length Adjustable Belt Conveyor-1Document3 pages6.design and Fabrication of Length Adjustable Belt Conveyor-1Chockalingam AthilingamNo ratings yet
- Shock Absorber Failure 2018Document3 pagesShock Absorber Failure 2018Chockalingam AthilingamNo ratings yet
- 11 Foldable Bridge 2017 PrintDocument48 pages11 Foldable Bridge 2017 PrintChockalingam AthilingamNo ratings yet
- Project List With Cost Details 2018 2019 Panimalar PolyDocument8 pagesProject List With Cost Details 2018 2019 Panimalar PolyChockalingam AthilingamNo ratings yet
- Mixer GrinderDocument29 pagesMixer GrinderChockalingam AthilingamNo ratings yet
- Bottling Plant PLC 2019Document4 pagesBottling Plant PLC 2019Chockalingam AthilingamNo ratings yet
- Gas Cutting DeviceDocument3 pagesGas Cutting DeviceChockalingam AthilingamNo ratings yet
- Safety For Motorised Sheet Forming 2018Document3 pagesSafety For Motorised Sheet Forming 2018Chockalingam AthilingamNo ratings yet
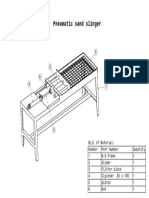
- Pneumatic Sand SlingerDocument1 pagePneumatic Sand SlingerChockalingam AthilingamNo ratings yet
- Block Diagram of Carbon Level IndicatorDocument1 pageBlock Diagram of Carbon Level IndicatorChockalingam AthilingamNo ratings yet
- Manual Bi Folding Gate PRINTCOPY SBDDocument50 pagesManual Bi Folding Gate PRINTCOPY SBDChockalingam AthilingamNo ratings yet
- Plastic Injection Manual 2016 Amk PolyDocument43 pagesPlastic Injection Manual 2016 Amk PolyChockalingam AthilingamNo ratings yet
- Scotck Yoke PPT Veltech 2016Document29 pagesScotck Yoke PPT Veltech 2016Chockalingam Athilingam50% (2)
- HTTP FOR ENGINEERINGDocument1 pageHTTP FOR ENGINEERINGChockalingam AthilingamNo ratings yet
- Lorry Trailor Lifter CostDocument1 pageLorry Trailor Lifter CostChockalingam AthilingamNo ratings yet
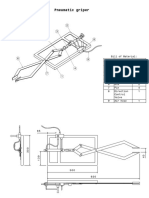
- Pneumatic GriperDocument2 pagesPneumatic GriperChockalingam AthilingamNo ratings yet
- MOTORISED Press Durga Poly 2016Document76 pagesMOTORISED Press Durga Poly 2016Chockalingam AthilingamNo ratings yet
- F T ZL 6L: 4 - RLT TTJ R5 !.1Document1 pageF T ZL 6L: 4 - RLT TTJ R5 !.1Chockalingam AthilingamNo ratings yet
- Amk SymbolDocument6 pagesAmk SymbolChockalingam AthilingamNo ratings yet
- Pneumatic Elevator Abs 20124Document3 pagesPneumatic Elevator Abs 20124Chockalingam AthilingamNo ratings yet
- HonningDocument1 pageHonningChockalingam AthilingamNo ratings yet
- Shell and Tube Heat Exchanger Design Using CFD ToolsDocument4 pagesShell and Tube Heat Exchanger Design Using CFD ToolsChockalingam AthilingamNo ratings yet
- Electronic ComparatorDocument1 pageElectronic ComparatorChockalingam AthilingamNo ratings yet
- IR Sensor UnitDocument1 pageIR Sensor UnitChockalingam AthilingamNo ratings yet