You might also like
- Alarm System For Medicine Reminder Based On MicrocontrollerDocument4 pagesAlarm System For Medicine Reminder Based On MicrocontrollerEditor IJTSRD100% (1)
- Cellphone Based Agricultural Water Pump ControlDocument3 pagesCellphone Based Agricultural Water Pump Controlpraveen_kodgirwarNo ratings yet
- DC-DC Converter To Step Up Input VoltageDocument3 pagesDC-DC Converter To Step Up Input VoltageFawwaaz HoseinNo ratings yet
- A Novel Dynamic Voltage Restorer Based On Matrix ConvertersDocument17 pagesA Novel Dynamic Voltage Restorer Based On Matrix ConvertersJexux010% (1)
- Effectiveness of UVDocument49 pagesEffectiveness of UVmajortayNo ratings yet
- Charles City, Iowa Permeable Pavement Project ReportDocument60 pagesCharles City, Iowa Permeable Pavement Project ReportJim Malewitz50% (2)
- DVRDocument18 pagesDVRbsnl_cellone47100% (1)
- Fuzzy Logic Speed ControlDocument12 pagesFuzzy Logic Speed ControlRasheed AhamedNo ratings yet
- Speed Control of A DC Motor Using Hand GestureDocument4 pagesSpeed Control of A DC Motor Using Hand GestureArka Prava LahiriNo ratings yet
- Coin Based Water Controlling SystemDocument34 pagesCoin Based Water Controlling SystemSanthosh Guduru75% (4)
- DC Motor Speed Control Using PWMDocument14 pagesDC Motor Speed Control Using PWMVincent KorieNo ratings yet
- Iot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaDocument17 pagesIot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaakashlogicNo ratings yet
- Automatic Railway Gate ControlDocument22 pagesAutomatic Railway Gate ControlsriramNo ratings yet
- Eye Blink DocumentDocument38 pagesEye Blink Documentpavani13No ratings yet
- Multi Level Inverter DocumentationDocument25 pagesMulti Level Inverter Documentationn anushaNo ratings yet
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDocument76 pagesProject Report On Speed Control of DC Motor by Using PWM TechniquekishoreNo ratings yet
- Automatic Plant Irrigation System With Dry / Wet Soil Sense and Controlling 230V Water Pump For Agricultural Applications Using AT89S52 MCUDocument21 pagesAutomatic Plant Irrigation System With Dry / Wet Soil Sense and Controlling 230V Water Pump For Agricultural Applications Using AT89S52 MCURam MohanNo ratings yet
- Sharingan ThesisDocument69 pagesSharingan Thesisprince asadNo ratings yet
- Speed Control of DC Motor Using PWMDocument8 pagesSpeed Control of DC Motor Using PWMsunny kumarNo ratings yet
- Microcontroller Based Radar SystemDocument19 pagesMicrocontroller Based Radar SystemMeet MakwanaNo ratings yet
- Mini Project, Fabrication of Metal DetectorDocument41 pagesMini Project, Fabrication of Metal DetectorManishNo ratings yet
- Final Project Report of LabDocument7 pagesFinal Project Report of LabDuniya ANo ratings yet
- Automatic Railway Gate Controller DocumentationDocument53 pagesAutomatic Railway Gate Controller Documentationmnair201167% (3)
- Underwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureDocument19 pagesUnderwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureSudarshan RautNo ratings yet
- PPTDocument25 pagesPPTSaranya GuttulaNo ratings yet
- Underground Cable Fault Detection Using ZigbeeDocument36 pagesUnderground Cable Fault Detection Using ZigbeeRana AbrarNo ratings yet
- Obstacle Avoiding Robot Ppt-2Document24 pagesObstacle Avoiding Robot Ppt-2Faizan MansoorNo ratings yet
- Automatic Railway Gate Control Using MicroDocument24 pagesAutomatic Railway Gate Control Using Microமணிவேல் சந்திரன்No ratings yet
- Underground Cable Fault Detection and LocationDocument77 pagesUnderground Cable Fault Detection and LocationZerihun PaulosNo ratings yet
- Major DocumentDocument61 pagesMajor DocumentLE-224 MeghanaReddyNo ratings yet
- A Vision Base Application For Virtual Mouse Interface Using Hand GestureDocument6 pagesA Vision Base Application For Virtual Mouse Interface Using Hand GestureInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- SRMDocument60 pagesSRMKrupa KaranNo ratings yet
- Shunt Active Filter ReportDocument29 pagesShunt Active Filter Reportmandar100% (1)
- Home Appliance Control Using TV Remote - Report PDFDocument23 pagesHome Appliance Control Using TV Remote - Report PDFEngineers SolutionNo ratings yet
- Human Posture Alert Jacket ThesisDocument43 pagesHuman Posture Alert Jacket ThesisHamzaNo ratings yet
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDNo ratings yet
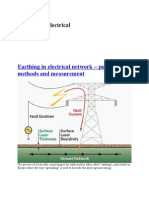
- Earthing in Electrical Network - Purpose, Methods and MeasurementDocument12 pagesEarthing in Electrical Network - Purpose, Methods and MeasurementShah JayNo ratings yet
- My SVPWMprojectDocument68 pagesMy SVPWMprojectHari Reddy100% (1)
- Protection and Monitoring of Three Phase Induction Motor From Over Voltage, Under Voltage, Single Phasing, Phase Reversal, and Overheating ReviewDocument4 pagesProtection and Monitoring of Three Phase Induction Motor From Over Voltage, Under Voltage, Single Phasing, Phase Reversal, and Overheating ReviewAnonymous CUPykm6DZNo ratings yet
- 46737projectreport1 160528152807Document48 pages46737projectreport1 160528152807Christian LunaNo ratings yet
- Thermal Analysis of Fins: AbstractDocument31 pagesThermal Analysis of Fins: AbstractJalagam Ravinder RaoNo ratings yet
- Diamond Security System in A Museum With Loud 60dB SireN1Document50 pagesDiamond Security System in A Museum With Loud 60dB SireN1Midde ShekarNo ratings yet
- Bomb and Fire Detection RobotDocument37 pagesBomb and Fire Detection RobotNavya SreeNo ratings yet
- Title: Automatic Load Sharing of Transformer: A Synopsis Report OnDocument5 pagesTitle: Automatic Load Sharing of Transformer: A Synopsis Report OnAshish Ghadoje100% (1)
- Controlling of AC Lamp Dimmer Through Mobile Phone: FeaturesDocument2 pagesControlling of AC Lamp Dimmer Through Mobile Phone: FeaturesHari KishorNo ratings yet
- Password Based Circuit BreakerDocument8 pagesPassword Based Circuit BreakerRakshitha kNo ratings yet
- On "GSM BASED E-NOTICE BOARD"Document28 pagesOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Iot Circuit BreakerDocument5 pagesIot Circuit BreakerMadhuri RudravelliNo ratings yet
- Solar Based Garbage Cleaning BoatDocument4 pagesSolar Based Garbage Cleaning BoatPoonam KilaniyaNo ratings yet
- Technical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed SensorsDocument3 pagesTechnical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed Sensorshamed razaNo ratings yet
- PLC Based Industrial Sorting Thesis ReportDocument63 pagesPLC Based Industrial Sorting Thesis ReportVishal MeghwarNo ratings yet
- 1 PDFDocument8 pages1 PDFB.Kailash Krishna PrasadNo ratings yet
- XBEE Based Transformer Protection and Oil TestingDocument3 pagesXBEE Based Transformer Protection and Oil TestingijsretNo ratings yet
- Portable Mobile ChargerDocument11 pagesPortable Mobile ChargerAbirami Mani57% (7)
- Special Machines: Theory, Modeling, Control and ApplicationsDocument31 pagesSpecial Machines: Theory, Modeling, Control and ApplicationsRAJA MNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorLasantha Abeykoon67% (3)
- Types of Stepper MotorDocument6 pagesTypes of Stepper MotorFazal Aziz WaliNo ratings yet
- Stepper Motors: Stepper Motor vs. Servo MotorDocument13 pagesStepper Motors: Stepper Motor vs. Servo MotorGurwinder Singh100% (1)
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherDocument23 pagesEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- Week 5Document31 pagesWeek 5HadeedAhmedSherNo ratings yet
- Week 9Document36 pagesWeek 9HadeedAhmedSher100% (1)
- Week 10Document21 pagesWeek 10HadeedAhmedSher100% (1)
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherDocument21 pagesEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherDocument25 pagesEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherMirza Azhar HaseebNo ratings yet
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherDocument17 pagesEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherMirza Azhar HaseebNo ratings yet
- EE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherDocument27 pagesEE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherDocument34 pagesEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherDocument23 pagesEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherMirza Azhar HaseebNo ratings yet
- Aqaid Salf SalaheenDocument113 pagesAqaid Salf SalaheenHadeedAhmedSherNo ratings yet
- EE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherDocument19 pagesEE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherDocument22 pagesEE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSher100% (1)
- Week 10 ResourcesDocument24 pagesWeek 10 ResourcesHadeedAhmedSherNo ratings yet
- EE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherDocument31 pagesEE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- Week 7 ResourcesDocument36 pagesWeek 7 ResourcesHadeedAhmedSherNo ratings yet
- EE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherDocument15 pagesEE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherDocument32 pagesEE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDocument27 pagesEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherDocument20 pagesEE-231 Electronics I: Engr. Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Circuit Analysis: Dr. Hadeed Ahmed SherDocument29 pagesEE-211 Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Circuit Analysis: Dr. Hadeed Ahmed SherDocument28 pagesEE-211 Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDocument22 pagesEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDocument24 pagesEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDocument32 pagesEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Circuit Analysis: Dr. Hadeed Ahmed SherDocument23 pagesEE-211 Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Circuit Analysis: Dr. Hadeed Ahmed SherDocument26 pagesEE-211 Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- EE-211 Circuit Analysis: Dr. Hadeed Ahmed SherDocument22 pagesEE-211 Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSher0% (1)
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDocument34 pagesEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- Week1 - FEE GIKIDocument38 pagesWeek1 - FEE GIKIHadeedAhmedSherNo ratings yet
- Start Up and Commissioning of Chilled Water PumpsDocument6 pagesStart Up and Commissioning of Chilled Water PumpsAlaa AnwerNo ratings yet
- Design of Water Supply System-High Rise BLDGDocument108 pagesDesign of Water Supply System-High Rise BLDGcris bunagNo ratings yet
- EJ Mini Lesson #7Document3 pagesEJ Mini Lesson #7ArmandoNo ratings yet
- Practical - Magnetic - Design (Fill Factor) PDFDocument20 pagesPractical - Magnetic - Design (Fill Factor) PDFAhtasham ChaudhryNo ratings yet
- 2nd Grading LAA Grade 10Document54 pages2nd Grading LAA Grade 10Urduja Kyle OdiacerNo ratings yet
- Design of Circular ShaftDocument7 pagesDesign of Circular Shaftจอม อรรฐาเมศร์No ratings yet
- InfoDocument18 pagesInfoKaran Verm'aNo ratings yet
- Applications of Modern RF PhotonicsDocument213 pagesApplications of Modern RF PhotonicsrmcmillanNo ratings yet
- 2010 Jan-01Document32 pages2010 Jan-01Shine PrabhakaranNo ratings yet
- Physics Lab - Detailed - Answer KeyDocument6 pagesPhysics Lab - Detailed - Answer KeyJasdeepSinghNo ratings yet
- 20CB PDFDocument59 pages20CB PDFChidiebere Samuel OkogwuNo ratings yet
- Brazil (1997) The Communicative Value BW PDFDocument200 pagesBrazil (1997) The Communicative Value BW PDFJuan LopezNo ratings yet
- DLT Strand Jack Systems - 2.0 - 600 PDFDocument24 pagesDLT Strand Jack Systems - 2.0 - 600 PDFganda liftindoNo ratings yet
- 23AE23 DS enDocument4 pages23AE23 DS enBhageerathi SahuNo ratings yet
- Beam Design: BackgroundDocument2 pagesBeam Design: BackgroundolomizanaNo ratings yet
- GB-T 5137.1-2002 Test Methods of Safety Glazing Materials Used On Road Vehicles Part1 Mechanical Properties TestsDocument14 pagesGB-T 5137.1-2002 Test Methods of Safety Glazing Materials Used On Road Vehicles Part1 Mechanical Properties TestsRandyzhuNo ratings yet
- Magnetic Field of A SolenoidDocument5 pagesMagnetic Field of A SolenoidKang Yuan ShingNo ratings yet
- An FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure CommunicationsDocument5 pagesAn FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure Communicationslaz_chikhi1574No ratings yet
- DLP Mathematics 6 q1 w6Document5 pagesDLP Mathematics 6 q1 w6Kathlyn PerezNo ratings yet
- Tecumseh Parts List OHV 135Document5 pagesTecumseh Parts List OHV 135M MNo ratings yet
- Solved Worksheet-Cell and Specialized Cells 3Document3 pagesSolved Worksheet-Cell and Specialized Cells 3Everything Everything100% (1)
- Histograms - 2Document6 pagesHistograms - 2Sonia HalepotaNo ratings yet
- Form 1 ExercisesDocument160 pagesForm 1 Exerciseskays MNo ratings yet
- Executive Incentives and The Horizon Problem An - 1991 - Journal of AccountingDocument39 pagesExecutive Incentives and The Horizon Problem An - 1991 - Journal of AccountingYuhan JiNo ratings yet
- Ijarece Vol 8 Issue 8 141 144Document4 pagesIjarece Vol 8 Issue 8 141 144Rnav rnavNo ratings yet
- Backup Olt CodigoDocument5 pagesBackup Olt CodigoCarlos GomezNo ratings yet
- 5-Canal Irrigation SystemDocument23 pages5-Canal Irrigation Systemwajid malikNo ratings yet
- 6100 SQ Lcms Data SheetDocument4 pages6100 SQ Lcms Data Sheet王皓No ratings yet
- Case StudyDocument10 pagesCase StudyVintage ArtNo ratings yet
- CREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)Document28 pagesCREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)akshithaNo ratings yet