You might also like
- Autofrettage in Pressure VesselsDocument28 pagesAutofrettage in Pressure Vesselssran1986No ratings yet
- Jacketed Piping Interview QuestionsDocument4 pagesJacketed Piping Interview Questionsbinukumar100No ratings yet
- 39-29computational Buckling Analysis of Wind Loaded5-1-PBDocument9 pages39-29computational Buckling Analysis of Wind Loaded5-1-PBzaneliuNo ratings yet
- CHE Problems - ChopeyDocument11 pagesCHE Problems - ChopeyCarlos Miguel DacaimatNo ratings yet
- Chattopadhyay - Material-Selection-For-A-Pressure-Vessel PDFDocument10 pagesChattopadhyay - Material-Selection-For-A-Pressure-Vessel PDFRenan Gustavo PazNo ratings yet
- Shell and Tube Heat Exchanger Design Using CFD ToolsDocument4 pagesShell and Tube Heat Exchanger Design Using CFD ToolsChockalingam AthilingamNo ratings yet
- Thermodynamic Optimization of Bottoming CycleDocument15 pagesThermodynamic Optimization of Bottoming CycleStjepkoKatulićNo ratings yet
- Seismic Analysis of A Liquid Storage Tan PDFDocument5 pagesSeismic Analysis of A Liquid Storage Tan PDFMesfinNo ratings yet
- Simulation of Power Plants by ExcelDocument19 pagesSimulation of Power Plants by ExcelAbd Elrahman HamdyNo ratings yet
- 07 Design of Tall Pressure VesselsDocument14 pages07 Design of Tall Pressure VesselsNitesh SardarNo ratings yet
- Chapter 3 Properties of Pure SubstanceDocument28 pagesChapter 3 Properties of Pure SubstanceKhairul HafizNo ratings yet
- Design and Analysis of Pressure Vessel With Different End DomesDocument10 pagesDesign and Analysis of Pressure Vessel With Different End Domesali AbbasNo ratings yet
- Heat Exchanger With Helical BafflesDocument8 pagesHeat Exchanger With Helical BaffleshuangjlNo ratings yet
- ContentDocument23 pagesContentajay katrojNo ratings yet
- Dci Epe Bladder AccumulatorsDocument43 pagesDci Epe Bladder AccumulatorsMiguel YudegoNo ratings yet
- Stiffened Plates PDFDocument16 pagesStiffened Plates PDFfarhadmrt6923No ratings yet
- Analysis of A Failed Pipe Elbow in Geothermal Production Facility PDFDocument7 pagesAnalysis of A Failed Pipe Elbow in Geothermal Production Facility PDFAz ArNo ratings yet
- Mandatory Appendix 9Document2 pagesMandatory Appendix 9Asep DarojatNo ratings yet
- Stresses in Large Horizontal Cylindrical Pressure Vessels On Two Saddle SupportsDocument12 pagesStresses in Large Horizontal Cylindrical Pressure Vessels On Two Saddle SupportsAlexander BlackNo ratings yet
- Performance Analysis of Separating and Throttling Calorimeter To DetermineDocument5 pagesPerformance Analysis of Separating and Throttling Calorimeter To DetermineDaniel LauNo ratings yet
- Compact Formulation of the Bell-Delaware Method for Heat Exchanger DesignDocument12 pagesCompact Formulation of the Bell-Delaware Method for Heat Exchanger DesignAurelio Poletto100% (1)
- Condensing Economizer ArticleDocument4 pagesCondensing Economizer ArticleErhan KayabaşıNo ratings yet
- Adigrat University: College of Engineering and Technology Department of Chemical EnginneringDocument39 pagesAdigrat University: College of Engineering and Technology Department of Chemical EnginneringSeid Aragaw100% (1)
- Design Rule Asme Sec Viii Div 2Document2 pagesDesign Rule Asme Sec Viii Div 2Malathy RajaNo ratings yet
- Seismic Design of Liquid Storage Tank To Erathquakes (Chen & Barber 1976)Document8 pagesSeismic Design of Liquid Storage Tank To Erathquakes (Chen & Barber 1976)Bernard ShuenNo ratings yet
- Plasma Lighting System of LowDocument10 pagesPlasma Lighting System of LowStanislavNo ratings yet
- Tube Damage Mechanism and Repair Techniques PDFDocument16 pagesTube Damage Mechanism and Repair Techniques PDFArjed Ali ShaikhNo ratings yet
- C-FC-01-Liquid Tightness Design of LNG Storage Tank Incorporating Cryogenic Temperature-Induced StressesDocument8 pagesC-FC-01-Liquid Tightness Design of LNG Storage Tank Incorporating Cryogenic Temperature-Induced StressesManoj KanadiaNo ratings yet
- Basics of Tank Seismic OCRDocument35 pagesBasics of Tank Seismic OCRmario_gNo ratings yet
- Thermal Strain and Stresses in Compound BarsDocument5 pagesThermal Strain and Stresses in Compound BarsmdmarufurNo ratings yet
- Pvp2010-25092-Lower Bound Buckling Load of A Floating Roof PontoonDocument9 pagesPvp2010-25092-Lower Bound Buckling Load of A Floating Roof PontoonAnonymous wWOWz9UnWNo ratings yet
- Measurements in A Pulsating FlowDocument13 pagesMeasurements in A Pulsating Flowusebio64No ratings yet
- Hot Box Design PDFDocument8 pagesHot Box Design PDFAbu Anas M.SalaheldinNo ratings yet
- MSD Report Pressure Vessel DRAFT 1Document26 pagesMSD Report Pressure Vessel DRAFT 1prabhaakarNo ratings yet
- Mechanical Design of Shell and Tube Type PDFDocument4 pagesMechanical Design of Shell and Tube Type PDFSuryaprakashNo ratings yet
- Analytical Model For Beams On Elastic Foundations Considering The Coupling of HorizontalDocument12 pagesAnalytical Model For Beams On Elastic Foundations Considering The Coupling of HorizontalPrantik Adhar SamantaNo ratings yet
- Prediction of Thermal Fatigue Life of A Turbine Nozzle Guide VaneDocument9 pagesPrediction of Thermal Fatigue Life of A Turbine Nozzle Guide VanejswxieNo ratings yet
- Reformer Tube FailureDocument9 pagesReformer Tube FailureAhmad Riaz KhanNo ratings yet
- Chapter 07.00G Physical Problem For Integration Mechanical EngineeringDocument4 pagesChapter 07.00G Physical Problem For Integration Mechanical EngineeringMichael HaywardNo ratings yet
- Advanced Distillation Technology: A Basic Guide to Process Simulation and the Latest TechniquesDocument19 pagesAdvanced Distillation Technology: A Basic Guide to Process Simulation and the Latest TechniquesWawan Swaiper Cool100% (1)
- Cubic Equations of State-Which Is BestDocument17 pagesCubic Equations of State-Which Is BestvenkieeNo ratings yet
- ASME VIII Div.1 Cyclic Loading Verification ManualDocument4 pagesASME VIII Div.1 Cyclic Loading Verification ManualGovindan KrishnamoorthybashyamNo ratings yet
- eArt-Performance Analysis of Spiral Tube Heat ExchangerDocument4 pageseArt-Performance Analysis of Spiral Tube Heat ExchangerMoly69xNo ratings yet
- Casatben15 PDFDocument8 pagesCasatben15 PDFRafaelBirbiliNo ratings yet
- CH 06Document48 pagesCH 06LeonardoMadeira11No ratings yet
- A Textbook of Machine Design: CV AV DV BVDocument3 pagesA Textbook of Machine Design: CV AV DV BVWilly ChandraNo ratings yet
- Design of Tanks For Storage of Oil and WaterDocument31 pagesDesign of Tanks For Storage of Oil and WaterUhong LaiNo ratings yet
- Joule Thomson Effect: Paper: Physical Chemistry (UNIT-I Thermodynamics)Document10 pagesJoule Thomson Effect: Paper: Physical Chemistry (UNIT-I Thermodynamics)Shahzad100% (1)
- 634183496451357500Document24 pages634183496451357500Tiar_Rahman_9553No ratings yet
- CB24 - 30 Degree J-Rib Manual - 347862Document83 pagesCB24 - 30 Degree J-Rib Manual - 347862gechaves1No ratings yet
- Chapter 1 7Document76 pagesChapter 1 7Ian ReyesNo ratings yet
- 882design of Helical Baffle in Shell and Tube Heat Exchanger and Comparing With Segmental Baffle Using Kern Method PDFDocument6 pages882design of Helical Baffle in Shell and Tube Heat Exchanger and Comparing With Segmental Baffle Using Kern Method PDFDavid Alemán Sánchez100% (1)
- Thin Walled Pressure VesselsDocument11 pagesThin Walled Pressure VesselsPanchoMiyamoto100% (1)
- AE 533 Lecture 3Document19 pagesAE 533 Lecture 3sultan aliNo ratings yet
- Pressure Vessel Stress AnalysisDocument52 pagesPressure Vessel Stress Analysisratchagaraja100% (1)
- Chapter 8. Axisymmetrically Loaded Members: Figure P7.42Document43 pagesChapter 8. Axisymmetrically Loaded Members: Figure P7.42asifNo ratings yet
- Stress in Pressure CylinderDocument3 pagesStress in Pressure CylinderbmyertekinNo ratings yet
- Fluid Mechanics For JEE MaiDocument37 pagesFluid Mechanics For JEE MaiNitish Goel100% (1)
- 3 Pressure Vessels Design Manufacturers MersenDocument12 pages3 Pressure Vessels Design Manufacturers MersenekinathNo ratings yet
- Piping PDFDocument46 pagesPiping PDFGORO43100% (1)
- Pumps TypesDocument6 pagesPumps TypesYo MegalómanoNo ratings yet
- 6177-4 Press and Shrink FitsDocument11 pages6177-4 Press and Shrink FitsRajesh RajwadeNo ratings yet
- How To Select A Pump-By Majid HamedyniaDocument72 pagesHow To Select A Pump-By Majid Hamedyniamajid100% (2)
- Engg & Piping Design Guide (FRP Pipe)Document36 pagesEngg & Piping Design Guide (FRP Pipe)karuna346No ratings yet
- Pressure Vessel Design (Basic)Document10 pagesPressure Vessel Design (Basic)Jason Gibbs100% (1)
- Pressure Vessels - Combined StressesDocument8 pagesPressure Vessels - Combined StressesHarish S ChinaswamyNo ratings yet
- Piping Workbook PIDesignDocument73 pagesPiping Workbook PIDesignUrsula MoeringsNo ratings yet
- Pipe EnggDocument46 pagesPipe EnggNirmal CoolNo ratings yet
- Geothermal Pipe Line DesignDocument15 pagesGeothermal Pipe Line DesignjohnjuantamadNo ratings yet
- Centrifugal Pump Guide: Impeller Speed Determines HeadDocument12 pagesCentrifugal Pump Guide: Impeller Speed Determines Headkhairul_husniNo ratings yet
- Electrical Energy Equipment: Pumps and Pumping SystemsDocument19 pagesElectrical Energy Equipment: Pumps and Pumping SystemsvsajvNo ratings yet
- Pumps and Motors PDFDocument28 pagesPumps and Motors PDFபத்மநாபன் ஶ்ரீநிவாஸன்No ratings yet
- PD Vs Cetrifugal Pump PDFDocument3 pagesPD Vs Cetrifugal Pump PDFneharoybhushanNo ratings yet
- Pumps & MotorsDocument370 pagesPumps & MotorsStefano SquadraniNo ratings yet
- Priming The PumpDocument27 pagesPriming The PumpDubaiHMARNo ratings yet
- Water PumpsDocument3 pagesWater PumpsDubaiHMARNo ratings yet
- Pumps & MotorsDocument370 pagesPumps & MotorsStefano SquadraniNo ratings yet
- 12inch Pipe X 500MT Per HR C3@ 10deg.cDocument13 pages12inch Pipe X 500MT Per HR C3@ 10deg.cDubaiHMARNo ratings yet
- Failure Analysis of Rotating Equipment Using Root Cause Analysis MethodsDocument7 pagesFailure Analysis of Rotating Equipment Using Root Cause Analysis MethodsDubaiHMARNo ratings yet
- Failure Analysis of Rotating Equipment Using Root Cause Analysis MethodsDocument7 pagesFailure Analysis of Rotating Equipment Using Root Cause Analysis MethodsDubaiHMARNo ratings yet
- Cathodic ProtectionDocument52 pagesCathodic Protectionredback666100% (2)
- Fatigue Design of Process EquipmentDocument94 pagesFatigue Design of Process EquipmentGuillermo CorderoNo ratings yet
- PV Elite WebinarDocument24 pagesPV Elite WebinarAndrea Hank LattanzioNo ratings yet
- 16 Preiss Study en 13445 Asme ViiiDocument26 pages16 Preiss Study en 13445 Asme ViiiDubaiHMARNo ratings yet
- Pressure VesselDocument26 pagesPressure VesselMohd Azharudin Mohadi100% (1)
- Comparative Study Manufacturing Cost Between EN13445 and ASMEDocument32 pagesComparative Study Manufacturing Cost Between EN13445 and ASMEDries VandezandeNo ratings yet
- Bringing Industrial Automation Environment Into Classroom: A Didactic Three-Tank and Heat Exchanger ModuleDocument5 pagesBringing Industrial Automation Environment Into Classroom: A Didactic Three-Tank and Heat Exchanger Modulenicacio_89507470No ratings yet
- TARPfinal PDFDocument28 pagesTARPfinal PDFRakesh ReddyNo ratings yet
- Side Wall SprinklerDocument6 pagesSide Wall SprinklerLasandu WanniarachchiNo ratings yet
- MCQ - QuestionsTM P-1 PDFDocument8 pagesMCQ - QuestionsTM P-1 PDFRislan MohammedNo ratings yet
- DYNAenergetics 2.875 PA Auto-Vent Firing Head Field Assembly ProcedureDocument7 pagesDYNAenergetics 2.875 PA Auto-Vent Firing Head Field Assembly ProceduremahsaNo ratings yet
- BS Basics Boundary Scan PDFDocument2 pagesBS Basics Boundary Scan PDFShankar ArunmozhiNo ratings yet
- LCD panel and module replacement parts for saleDocument1 pageLCD panel and module replacement parts for saleValeria bolañosNo ratings yet
- Floor ManualDocument35 pagesFloor ManualGihan ChathurangaNo ratings yet
- Jobber JR DetailsDocument2 pagesJobber JR DetailsUrvish PatelNo ratings yet
- Crisis Management PlanDocument8 pagesCrisis Management PlanNfareeNo ratings yet
- Mistika SGCDocument17 pagesMistika SGCflameadgNo ratings yet
- ExMED Debrief 2019Document16 pagesExMED Debrief 2019Hamilton WintersNo ratings yet
- Binary PDFDocument13 pagesBinary PDFbyprasadNo ratings yet
- L .. Eee - .: Distribution Voltage RegulatorsDocument11 pagesL .. Eee - .: Distribution Voltage RegulatorsSirajulNo ratings yet
- Why I Play Bass March 14 2013Document293 pagesWhy I Play Bass March 14 2013Paul van Niekerk80% (5)
- Electronics QuestionnaireDocument4 pagesElectronics QuestionnaireRenie FedericoNo ratings yet
- Huffman & ShannonDocument30 pagesHuffman & ShannonDhamodharan SrinivasanNo ratings yet
- Camera Raw UpdateDocument3 pagesCamera Raw UpdateHamsharfiNo ratings yet
- Circle Generation AlgorithmDocument3 pagesCircle Generation AlgorithmAhmed AjmalNo ratings yet
- Fuzzy Set Theory: UNIT-2Document45 pagesFuzzy Set Theory: UNIT-2Sharma SudhirNo ratings yet
- J) Method Statement For Discharge of Stormwater and Rain WaterDocument4 pagesJ) Method Statement For Discharge of Stormwater and Rain WaterLee Tin YanNo ratings yet
- HDDTB 15 PDFDocument4 pagesHDDTB 15 PDFdakidofdaboomNo ratings yet
- Service Manual Sony MHC-V5Document122 pagesService Manual Sony MHC-V5Enya Andrea Ribba HernandezNo ratings yet
- Diligence International Group Understands MexicoDocument2 pagesDiligence International Group Understands MexicoPR.comNo ratings yet
- On Tap Water Filter System InstructionsDocument48 pagesOn Tap Water Filter System InstructionsFilipa FigueiredoNo ratings yet
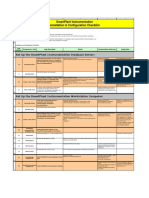
- SmartPlant Instrumentation installation checklistDocument2 pagesSmartPlant Instrumentation installation checklistmnoormohamed82No ratings yet
- Operations and Service 69UG15: Diesel Generator SetDocument64 pagesOperations and Service 69UG15: Diesel Generator SetAnonymous NYymdHgyNo ratings yet
- Datasheet - SP 275K INH String InvDocument1 pageDatasheet - SP 275K INH String Invsharib26No ratings yet
- Mapping UCLA Network DrivesDocument2 pagesMapping UCLA Network DriveswebscaleNo ratings yet
- OTC13998Document15 pagesOTC13998Raifel MoralesNo ratings yet