Professional Documents
Culture Documents
Hydraulics & Pneumatics
Uploaded by
Aakash SinghOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Hydraulics & Pneumatics
Uploaded by
Aakash SinghCopyright:
Available Formats
Hydraulics & Pneumatic Systems
Department of Mechanical & Manufacturing Engineering Manipal Institute of Technology - Manipal
Hydraulics & Pneumatic Systems
Introduction
Practically every industrial process requires objects to be moved, manipulated or be subjected to some form of force. This is generally accomplished by means of electrical equipment (such as motors or solenoids), or via devices driven by air (pneumatics) or liquids (hydraulics). Traditionally, pneumatics and hydraulics are thought to be a mechanical engineer's subject (and are generally taught as such in colleges). In practice, techniques (and, more important, the fault finding methodology) tend to be more akin to the ideas used in electronics and process control. This book serves as a guide to the operation of hydraulic and pneumatic systems. It is intended for engineering students and technicians who wish to have an insight into the components and operation of a pneumatic or hydraulic system. The entire content has been deliberately kept simple with the aim of making the book readable rather than rigorous. It is not, therefore, a design manual and topics such as sizing of pipes and valves have been deliberately omitted.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 1
Hydraulics & Pneumatic Systems
Chapter 01
1. Introduction to pneumatics
Most industrial processes require objects or substances to be moved from one location to another or a force to be applied to hold, shape or compress a product. Such activities are performed by Prime Movers; the workhorses of manufacturing industries. In many locations all prime movers are electrical. Rotary motions can be provided by simple motors, and linear motion can be obtained from rotary motion by devices such as screw jacks or rack and pinions. Where a pure force or a short linear stroke is required a solenoid may be used (although there are limits to the force that can be obtained by this means). Electrical devices are not; however, the only means of providing prime movers. Enclosed fluids (both liquids and gases) can also be used to convey energy from one location to another and, consequently, to produce rotary or linear motion or apply a force. Fluid based systems using liquids as transmission media are called hydraulic systems (from the Greek words hydra for water and aulos for a pipe; descriptions which imply fluids are water although oils are more commonly used). Gas-based systems are called Pneumatic systems (from the Greek pneumn for wind or breath). The most common gas is simply compressed air. Although nitrogen is occasionally used. The main advantages and disadvantages of pneumatic or hydraulic systems both arise out of the different characteristics of low density compressible gases and (relatively) high density incompressible liquids. A pneumatic system, for example, tends to have a 'softer' action than a hydraulic system which can be prone to producing noisy and wear inducing shocks in the piping. A liquid-based hydraulic system, however, can operate at far higher pressures than a pneumatic system and, consequently, can be used to provide very large forces.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 2
Hydraulics & Pneumatic Systems
1.1 Pneumatics in review Pneumatics has long since played an important role as a technology in the performance of mechanical work. It is also used in the development of automation solutions. In the majority of applications compressed air is used for one or more of the following functions: To determine the status of processors (sensors) Information processing (processors) Switching of actuators by means of final control elements Carrying out work (actuators) To be able to control machinery and installations necessitates the construction of a generally complex logic interconnection of statuses and switching conditions. This occurs as a result of the interaction of sensors, processors, control elements and actuators in pneumatic or partly pneumatic systems. The technological progress made in material, design and production processes has further improved the quality and diversity of pneumatic components and thereby contributed to their widely spread use in automation.
Some industrial applications employing pneumatics are listed below: General methods of material handling: Clamping Shifting Positioning Orienting Branching of material flow General applications: Packaging Filling Metering Locking Driving of axes Door or chute control Transfer of materials Turning and inverting of parts Sorting of parts Stacking of components Stamping and embossing of components
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 3
Hydraulics & Pneumatic Systems
1.2 Advantages and distinguishing characteristics of compressed air
Availability
Air is available practically everywhere in unlimited quantities.
Transport
Air can be easily transported in pipelines, even over large distances
Storage
Compressed air can be stored in a reservoir and removed as required. In addition, the reservoir can be transportable.
Temperature
Compressed air is relatively insensitive to temperature fluctuations. This ensures reliable operation, even under extreme conditions.
Explosion proof
Compressed air offers no risk of explosion or fire.
Cleanliness
Un-lubricated exhaust air is clean. Any un-lubricated air which escapes through leaking pipes or components does not cause contamination.
Components
The operating components are of simple construction and therefore relatively inexpensive.
Speed
Compressed air is a very fast working medium. This enables high working speeds to be attained.
Overload safe
Pneumatic tools and operating components can be loaded to the point of stopping and are therefore overload safe.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 4
Hydraulics & Pneumatic Systems
1.3 Structure and signal flow of pneumatic systems Pneumatic systems consist of an interconnection of different groups of elements.
1.1 Signal flow in pneumatic systems
This group of elements forms a control path for signal flow, starting from the signal section (input) through to the actuating section (output). Control elements control the actuating elements in accordance with the signals received from the processing elements. The primary levels in a pneumatic system are: Energy supply Input elements (sensors) Processing elements (processors) Control elements Power components (actuators)
The elements in the system are represented by symbols which indicate the function of the element.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 5
Hydraulics & Pneumatic Systems
1.2 Signal flow and the elements that help
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 6
Hydraulics & Pneumatic Systems
Chapter 02
2. Components of Pneumatic systems
2.1 Air compressors, air treatment and pressure regulation The vast majority of pneumatic systems use compressed atmospheric air as the operating medium (a small number of systems use nitrogen obtained commercially from liquid gas suppliers). Unlike hydraulic systems, a pneumatic system is 'open'; the fluid is obtained free, used and then vented back to atmosphere. Pneumatic systems use a compressible gas; hydraulic systems an incompressible liquid, and this leads to some significant differences. The pressure of a liquid may be raised to a high level almost instantaneously, whereas pressure rise in a gas can be distinctly leisurely. Pressure in a hydraulic system can be quickly and easily controlled by devices such as unloading and pressure regulating valves. Fluid is thus stored at atmospheric pressure and compressed to the required pressure as needed. The slow response of an air compressor, however, precludes such an approach in a pneumatic system and necessitates storage of compressed air at the required pressure in a receiver vessel. The volume of this vessel is chosen so there are minimal deviations in pressure arising from flow changes in loads and the compressor is then employed to replace the air used, averaged over an extended period of time (e.g. a few minutes). Deviations in air pressure are smaller, and compressor control is easier if a large receiver feeds many loads. A large number of loads statistically results in a more even flow of air from the receiver, also helping to maintain a steady pressure. On many sites, therefore, compressed air is produced as a central service which is distributed around the site in a similar manner to electricity, gas and water. Behavior of a gas subjected to changes in pressure, volume and temperature is governed by the general gas equation. PV = nRT (2.1)
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 7
Hydraulics & Pneumatic Systems
A compressor increases air pressure by reducing its volume, and expression 2.1 predicts a resultant rise in temperature. A pneumatic system must therefore incorporate some method of removing this excess heat. For small systems, simple fins on the compressor (similar in construction to an air-cooled internal combustion engine) will suffice. For larger systems, a separate cooler (usually employing water as the heat-removing medium) is needed. Atmospheric air contains water vapor, the actual amount varying from day to day according to humidity. The maximum amount of water vapor held in a given volume of air is determined by temperature, and any excess condenses out as liquid droplets (commonly experienced as condensation on cold windows). A similar effect occurs as compressed air is cooled, and if left the resultant water droplets would cause valves to jam and corrosion to form in pipes. An aftercooler must therefore be followed by a water separator. Often after coolers and separators are called, collectively, primary air treatment units. Dry cool air is stored in the receiver, with a pressure switch used to start and stop the compressor motor, maintaining the required pressure. Ideally, air in a system has a light oil mist to reduce chances of corrosion and to lubricate moving parts in valves, cylinders and so on. This oil mist cannot be added before the receiver as the mist would form oil droplets in the receiver's relatively still air, so the exit air from the receiver passes through a unit which provides the lubricating mist along with further filtration and water removal. This process is commonly called secondary air treatment. Often, air in the receiver is held at a slightly higher pressure than needed to allow for pressure drops in the pipe lines. A local pressure regulation unit is then employed with the secondary air treatment close to the device using air. Composite devices called service units comprising water separation, lubricator and pressure regulation are available for direct line monitoring close to the valves and actuators of a pneumatic system.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 8
Hydraulics & Pneumatic Systems
Figure 2.1 thus represents the components used in the production of a reliable source of compressed air.
2.1 Components in an air generation and distribution set-up
2.2 Compressor types Like hydraulic pumps, air compressors can be split into positive displacement devices (where a fixed volume of air is delivered on each rotation of the compressor shaft) and dynamic devices such as centrifugal or axial blowers. The vast majority of air compressors are of the positive displacement type. A compressor is selected by the pressure it is required to work at and the volume of gas it is required to deliver. As explained in the previous section, pressure in the receiver is generally higher than that required at the operating position, with local pressure regulation being used. Pressure at the compressor outlet (which for practical purposes will be the same as that in the receiver) is called the working pressure and is used to specify the compressor. Pressure at the operating point is called, not surprisingly, the operating pressure and is used to specify valves, actuators and other operating devices. Care should be taken in specifying the volume of gas a compressor is required to deliver. Expression 2.2 shows the volume of a given mass of gas to be highly dependent on pressure and temperature. Delivery volume of a compressor is defined in terms of gas at normal atmospheric conditions. Two standards known as standard temperature and pressures (STP) are commonly used, although differences between them are small for industrial users.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 9
Hydraulics & Pneumatic Systems
The technical normal condition is The physical normal condition is : P = 0.98 bar absolute, T = 200 C : P = 1.01 bar absolute, T = 00 C (2.2)
The term normal temperature and pressure (NTP) is also used. Required delivery volume of a compressor (in m3min-1 or ft3min-1, according to the units used) may be calculated for the actuators at the various operating positions (with healthy safety margins to allow for leakage) but care must be taken to ensure this total volume is converted to STP condition before specifying the required compressor delivery volume. A compressor delivery volume can be specified in terms of its theoretical volume (swept volume multiplied by rotational speed) or effective volume which includes losses. The ratio of these two volumes is the efficiency. Obviously the effective volume should be used in choosing a compressor (with, again, a safety margin for leakage). Required power of the motor driving the compressor is dependent on working pressure and delivery volume, and may be determined from expressions 2.2 and 2.5. Allowance must be made for the cyclic on/off operation of the compressor with the motor being sized for on load operation and not averaged over a period of time. 2.2.1 Piston compressors Piston compressors are by far the most common type of compressor, and a basic single cylinder form is shown in Figure 2.2. As the piston descends during the inlet stroke (Figure 2.2a), the inlet valve opens and air is drawn into the cylinder. As the piston passes the bottom of the stroke, the inlet valve closes and the exhaust valve opens allowing air to be expelled as the piston rises (Figure 2.2b) Figure 2.2 implies that the valves are similar to valves in an internal combustion engine. In practice, spring-loaded valves are used, which open and close under the action of air pressure across them. One common type uses a 'feather' of spring steel which moves above the inlet or output port, as shown in Figure 2.2c. A single cylinder compressor gives significant pressure pulses at the outlet port. This can be overcome to some extent by the use of a large receiver, but more often a multi-cylinder compressor is used. These are usually classified as vertical or horizontal in-line arrangements and the more compact V, Y or W constructions.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 10
Hydraulics & Pneumatic Systems
2.2 Schematic of a piston compressor (single acting) A compressor which produces one pulse of air per piston stoke (of which the example of Figure 2.2 is typical) is called a single acting compressor. A more even air supply can be obtained by the double acting action of the compressor in Figure 2.3, which uses two sets of valves and a crosshead to keep the piston rod square at all times. Double-acting compressors can be found in all configurations described earlier.
2.3 Piston compressor (Double acting)
Piston compressors described so far go direct from atmospheric to required pressure in a single operation. This is known as a single stage compressor. The general gas law (expression 2.1) showed compression of a gas to be accompanied by a significant rise in gas temperature. If the
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 11
Hydraulics & Pneumatic Systems
exit pressure is above about 5 bar in a single-acting compressor, the compressed air temperature can rise to over 200oC and the motor power needed to drive the compressor rises accordingly. For pressures over a few bar it is far more economical to use a multistage compressor with cooling between stages. Figure 2.4 shows an example. As cooling (undertaken by a device called an intercooler) reduces the volume of the gas to be compressed at the second stage there is a large energy saving. Normally two stages are used for pneumatic pressures of 10 to 15 bar, but multistage compressors are available for pressures up to around 50 bar. Multistage compressors can be manufactured with multi-cylinders as shown in Figure 2.4 or, more compactly, with a single cylinder and a double diameter piston as shown in Figure 2.5. There is contact between pistons and air, in standard piston compressors, which may introduce small amounts of lubrication oil from the piston walls into the air. This very small contamination may be undesirable in food and chemical industries. Figure 2.6 shows a common way of giving a totally clean supply by incorporating a flexible diaphragm between piston and air.
2.4 Multistage compressor with intercooler
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 12
Hydraulics & Pneumatic Systems
2.5 Multistage compressor (Compact model)
2.6 Flexible diaphragm compressor
2.2.2 Screw compressors Piston compressors are used where high pressures (> 20 bar) and relatively low volumes (< 10,000 m3 hr-1) are needed, but are mechanically relatively complex with many moving parts. Many applications require only medium pressure (< 10 bar) and medium flows (around 10,000 m3hr-1). For these applications, rotary compressors have the advantage of simplicity, with fewer moving parts rotating at a constant speed, and a steady delivery of air without pressure pulses.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 13
Hydraulics & Pneumatic Systems
One rotary compressor, known as the dry rotary screw compressor, is shown in Figure 2.7 and consists of two intermeshing rotating screws with minimal (around 0.05 mm) clearance. As the screws rotate, air is drawn into the housing, trapped between the screws and carried along to the discharge port, where it is delivered in a constant pulse-free stream.
Screws in this compressor can be synchronized by external timing gears. Alternatively one screw can be driven, the second screw rotated by contact with the drive screw. This approach requires oil lubrication to be sprayed into the inlet air to reduce friction between screws, and is consequently known as a wet rotary screw compressor. Wet screw construction though, obviously introduces oil contamination into the air which has to be removed by later oil separation units.
2.7 Screw compressor
2.2.3 Rotary compressors The vane compressor, shown in Figure 2.8 operates on similar principles to the hydraulic vane pump described in the chapter on hydraulics, although air compressors tend to be physically larger than hydraulic pumps. An unbalanced design is shown; balanced versions can also be constructed. Vanes can be forced out by springs or, more commonly, by centrifugal force.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 14
Hydraulics & Pneumatic Systems
2.8 Vane compressor
The lobe compressor of Figure 2.9 (often called a Roots blower) is often used when a positive displacement compressor is needed with high delivery volume but low pressure (typically 1-2 bar). Operating pressure is mainly limited by leakage between rotors and housing. To operate efficiently, clearances must be very small, and wear leads to a rapid fall in efficiency.
2.9 Lobe compressor (Roots blower)
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 15
Hydraulics & Pneumatic Systems
2.3 Air receivers and compressor control An air receiver is used to store high pressure air from the compressor. Its volume reduces pressure fluctuations arising from changes in load and from compressor switching. Air coming from the compressor will be warm (if not actually hot!) and the large surface area of the receiver dissipates this heat to the surrounding atmosphere. Any moisture left in the air from the compressor will condense out in the receiver, so outgoing air should be taken from the receiver top.
2.10 Air receiver
Figure 2.10 shows essential features of a receiver. They are usually of cylindrical construction for strength, and have a safety relief valve to guard against high pressures arising from failure of the pressure control scheme. Pressure indication and, usually, temperature indication are provided, with pressure switches for control of pressure and high temperature switches for remote alarms.
A drain cock allows removal of condensed water, and access via a manhole allows cleaning. Obviously, removal of a manhole cover is hazardous with a pressurized receiver, and safety routines must be defined and followed to prevent accidents. Control of the compressor is necessary to maintain pressure in the receiver. The simplest method of achieving this is to start the compressor when receiver pressure falls to some minimum pressure, and stop the compressor when pressure rises to a satisfactory level again, as illustrated in Figure 2.11. In
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 16
Hydraulics & Pneumatic Systems
theory two pressure switches are required (with the motor start pressure lower than the motor stop pressure) but, in practice, internal hysteresis in a typical switch allows one pressure switch to be used. The pressure in the receiver cycles between the start and stop pressure settings.
2.11 Compressor control system
2.4 Air treatment Atmospheric air contains moisture in the form of water vapor. We perceive the amount of moisture in a given volume of air as the humidity and refer to days with a high amount of water vapor as 'humid' or 'sticky', and days with low amounts of water vapor as 'good drying days'. The amount of water vapor which can be held in a given volume depends on temperature but does not depend on pressure of air in that volume. One cubic meter at 20oC for example, can hold 17 grams of water vapor. 2.4.1 Stages of air treatment Air in a pneumatic system must be clean and dry to reduce wear and extend maintenance periods. Atmospheric air contains many harmful impurities (smoke, dust, water vapor) and needs treatment before it can be used. In general, this treatment falls into three distinct stages, shown in Figure 2.12. First, inlet filtering removes particles which can damage the air compressor. Next, there is the need to dry the air to reduce humidity and lower the dew point. This is normally performed between the compressor and the receiver and is termed primary air treatment.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 17
Hydraulics & Pneumatic Systems
2.12 Stages of air treatment The final treatment is performed local to the duties to be performed, and consists of further steps to remove moisture and dirt and the introduction of a fine oil mist to aid lubrication. Not surprisingly this is generally termed secondary air treatment.
2.4.1.1 Filters Inlet filters are used to remove dirt and smoke particles before they can cause damage to the air compressor, and are classified as dry filters with replaceable cartridges (similar to those found in motor car air filters) or wet filters where the incoming air is bubbled through an oil bath then passed through a wire mesh filter. Dirt particles became attached to oil droplets during the bubbling process and are consequently removed by the wire mesh. Both types of filter require regular servicing: replacement of the cartridge element for the dry type; cleaning for the wet type. If a filter is to be cleaned, it is essential the correct detergent is used. Use of petrol or similar petrochemicals can turn an air compressor into an effective diesel engine- with severe consequences. Filters are classified according to size of particles they will stop. Particle size is measured in SI units of micrometers (the older metric term microns is still common) one micrometer (1 m) being 10-6 meter or 0.001 millimeter. Dust particles are generally larger than 10m, whereas smoke and oil particles are around 1m. A filter can have a nominal rating (where it will block 98% of particles of the specified size) or an absolute rating (where it blocks 100% of particles of the specified size). Micro-filters with removable cartridges passing air from the centre to the outside of the cartridge case will remove 99.9% of particles down to 0.01m, the limit of normal filtration. Coarse filters, constructed out of
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 18
Hydraulics & Pneumatic Systems
wire mesh and called strainers, are often used as inlet filters. These are usually specified in terms of the mesh size which approximates to particle size in micrometers as follows:
2.4.1.2 Air dryers When pneumatic components wear or become corroded as a result of moisture, they consume more compressed air - and lose energy efficiency. When this wear or corrosion becomes great enough, components must be repaired or replaced - increasing operating expense. The cost of replacement parts, labor, standby inventory, and downtime can have a devastating effect on the plant's bottom line. Eliminating even one of them by drying a system's compressed air will offset the cost of installing and operating the equipment to do the job. An earlier section described how air humidity can vary with temperature. Before air can be used, this excess moisture has to be removed to bring air humidity to reasonable levels. In bulk air systems all that may be required is a simple after cooler similar to the intercoolers described earlier, followed by a separator unit where the condensed water collects and can be drained off. Figure 2.13a shows a typical water trap and separator. Air flow through the unit undergoes a sudden reversal of direction and a deflector cone swirls the air (Figure 2.13b). Both of these cause heavier water particles to be flung out to the walls of the separator and to collect in the trap bottom from where they can be drained. Water traps are usually represented on circuit diagrams by the symbol of Figure 2.13c.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 19
Hydraulics & Pneumatic Systems
2.13 Air drying mechanisms
2.4.1.3 Lubricators Many pneumatic system components and almost all pneumatic tools perform better when lubricated with oil. Injecting an oil mist into the air-stream which powers them can continuously lubricate valves, cylinders, and air motors for proper operation and long service life. Locating the lubricator properly in the pipeline is important to ensure that the correct amount of lubrication reaches each device. Too little oil can allow excessive wear and cause premature failure. Excessive oil in the pipeline is wasteful and can become a contaminant in the ambient area as it is carried out of tools and valves by the air exhaust. Intermittent lubrication may be the worst condition of all because the oil film can dry out and form sludge or varnish on the internal surfaces of the equipment.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 20
Hydraulics & Pneumatic Systems
A carefully controlled amount of oil is often added to air immediately prior to use to lubricate moving parts (process control pneumatics are the exception as they usually require dry unlubricated air). This oil is introduced as a fine mist, but can only be added to thoroughly clean and dry air or a troublesome sticky emulsion forms. It is also difficult to keep the oil mist-laden air in a predictable state in an air receiver, so oil addition is generally performed as part of the secondary air treatment. The construction of a typical lubricator is shown with its symbol in Figure 2.14. The operation is similar to the principle of the petrol air mixing in a motor car carburetor. As air enters the lubricator its velocity is increased by a venturi ring causing a local reduction in pressure in the upper chamber. The pressure differential between lower and upper chambers causes oil to be drawn up a riser tube, emerging as a spray to mix with the air. The needle valve adjusts the pressure differential across the oil jet and hence the oil flow rate. The air-oil mixture is forced to swirl as it leaves the central cylinder causing excessively large oil particles to be flung out of the air stream.
2.14 Air Lubricator
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 21
Hydraulics & Pneumatic Systems
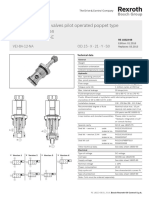
2.4.1.4 Pressure regulation Pneumatic pressure controls fall in the category of pressure reducing valves, commonly referred to as air line regulators. It is also essential, once a system pressure has been selected to perform a task, that air be supplied at constant pressure to the actuator, regardless of variations in flow and upstream pressure. Thus, it is important to add to a pneumatic system a pressure regulator that: Supplies air at constant pressure regardless of flow variation or upstream pressure. Helps operate the system more economically by minimizing the amount of pressurized air that is wasted. (This happens when the system operates at pressures higher than needed for the job) Helps promote safety by operating the actuator at reduced pressure Extends component life because operating at higher-than-recommended pressures increases wear rate and reduces equipment life Produces readily controlled variable air pressures where needed, and Increases operating efficiency Unbalanced poppet, non-pilot operated - Figure 2.15 shows the simplest type of unbalanced poppet regulator. Normally, supply pressure enters the regulator and flows around the poppet, which is seated, blocking flow.
Turning the adjustment screw to compress the adjustment spring forces the diaphragm down. It pushes the stem down and the poppet uncovers the orifice. As downstream pressure rises, pressure air acts on the underside of the diaphragm, balancing the force exerted by the adjustment spring. The poppet throttles the orifice to restrict flow and produce the desired pressure. As downstream flow demand varies, the regulator automatically repositions the poppet in relation to the orifice. The spring under the poppet ensures that the regulator will close at no-flow. This regulator is non-relieving.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 22
Hydraulics & Pneumatic Systems
2.15 Pressure regulator
2.4.2 Cylinders Pneumatic cylinders offer a straight rectilinear motion to mechanical elements. Cylinders are classified as light. Medium and heavy duty with respect to their application. Selections of materials for cylinder component depend greatly on this factor. Functionally, cylinders may be single acting and double acting. They may be further classified as diaphragm cylinder, duplex cylinder, through rod cylinder etc. End position cushioning of cylinders at certain times may be of utmost importance. However, if the cylinders do not travel up to the end of stroke, designers need not go for cushioned cylinders. The piston rods of cylinders are given special treatment as it is the highly stressed part. 2.4.2.1 Types of cylinders The pneumatic power is converted to straight line reciprocating motions by pneumatic cylinders. The various industrial applications for which air cylinders are used can be divided duty wise into three groups-light duty, medium duty and heavy duty. But according to the operating principle, air cylinders' can be sub-divided as (i) (ii) Single acting Double acting cylinders
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 23
Hydraulics & Pneumatic Systems
Single Acting Cylinder In a single acting cylinder, the compressed air is fed only in one side. Hence, this cylinder can produce work only in one direction. The return movement of the piston is effected by a built-in spring or by application of an external force. The spring is designed to return the piston to its initial position with a sufficiently high speed. A single acting cylinder is illustrated in Figure 2.16.
2.16 Single acting cylinder
Construction of Single Acting Cylinder Generally, a single acting cylinder is made of the following elements: (i) (ii) (iii) (iv) (v) (vi) (vii) (viii) The cylinder body (tube) Two end covers (one may be an integral part of the cylinder tube) A piston Piston rod V-cup seal O-ring Bush at bearing to guide the piston rod Built-in spring.
The end covers are fitted to the body by four cover screws or tie rod. An exploded view of a single acting cylinder is shown in Figure 2.17.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 24
Hydraulics & Pneumatic Systems
2.17 Exploded view of a single acting cylinder
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 25
Hydraulics & Pneumatic Systems
In a single acting cylinder with spring, the stroke is limited by the compressed length of the spring. While the piston moves forward, there is possibility of the spring to bulge out and scratch the finely finished piston-rod surface, thereby damaging it. The air has to first overcome the pressure of the spring and hence some power is lost before actual stroke of the piston starts. The spring returns the piston back to its initial position. The size of the spring will depend on the diameter and stroke length of the cylinder which means, for a bigger size of single acting cylinder, a heavier section of spring is to be used and hence more power is required to overcome the spring-pressure and also for a longer spring, the compressed length of the spring will also be bigger which means more loss of stroke length. Sometimes, for bigger size single acting cylinders, two concentric springs one above the other may be used. But considering the above points, it has been found that using a bigger single acting (SA) cylinder is quite uneconomical and, therefore, such a cylinder should not be used for a stroke length of more than 100 mm in general. At some cases, a single acting cylinder is designed in such a way that the forward movement is imparted by the spring and the return movement by the air-application of which may be found in braking action-air brake in trucks, rail-coaches etc. Figure 2.18 (i) shows the symbol of a single acting cylinder where piston is inside at initial position whereas Figure 2.18 (ii) shows the symbol of a single acting cylinder with piston outside at initial position.
2.18 Various configurations of a spring loaded single acting cylinder
Double Acting Cylinder A double acting cylinder is shown in Figure 2.19. The force exerted by the compressed air moves the piston in two directions in a double acting cylinder. They are used particularly when the piston is required to perform work not only on the advance movement but also on the return. In principle, the stroke length is unlimited, although buckling and bending must be considered before we select a particular size of piston diameter, rod length and stroke length.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 26
Hydraulics & Pneumatic Systems
Construction In Figure 2.19 different design of double acting cylinder (DA) is shown. A DA cylinder consists of: (i) (ii) (iii) (iv) (v) (vi) (vii) (viii) (ix) Cylinder tube Piston unit Piston rod Double cup packing on piston, rod packing of '0' rings End covers Bronze rod guide Port connection Cushion-assembly (in the case of cushion cylinder) Tie rods
The construction of DA cylinder is quite simple and varies according to the use and application of the cylinder. The materials used for the various parts will differ for different types of cylinders depending on application.
2.19 Double acting cylinder
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 27
Hydraulics & Pneumatic Systems
Cushion Assembly Cushioning of cylinders means gradual deceleration of the piston near the end of its stroke. It is especially helpful when the piston rod is connected to a heavy load and the piston is at a high speed. It reduces the shock or the impact load on the end covers of the cylinder. Diagrammatic view of a cushion assembly is shown in Figure 2.20 (a). The cushion bore is controlled by a cushioning screw as illustrated in Figure 2.20 (b).
2.20 Cushion assembly A cushion is a chamber of relatively small diameter into which a cushion nose or collar enters as the piston nears the end of its stroke so that air is trapped in the cylinder tube between the piston and cylinder cover and is bled-off slowly, reducing the rate of piston travel. Cushions are not a speed controlling device but only a shock alleviator. Cushions on standard cylinders are nearly 25 mm long. Cushions are of little value if the complete stroke is not used. Effect of cushioning is very much dependent on the amount of cushion opening in the cushion bore. The cycle time of the cylinder travel is greatly influenced by the cushion bore opening. Two parts of the cylinder are involved in the cushioning arrangement-the covers (depending on whether the
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 28
Hydraulics & Pneumatic Systems
cylinder is to be cushioned on one end or both ends) and the piston rod. Cushioning devices may be of either metal to metal fit or metal to synthetic material fit.
The cushioned cylinder cover contains either a cushion bushing or a machined cushion bore in CI cover finished to close limits. The cover usually contains a cushion needle which has a passage to it from the inside face of the cover and also contains a ball check valve which has a passage between the inside face of the cover and the air inlet port. When the cushion nose or collar approaches the cover and enters the cushion bore, the air is trapped between the piston and the cover which is being approached. The cushion needle is set so that the air is bled-off to the port connection at the proper rate to slow down the piston and reduce the shock. The end of the cushion nose is tapered, chamfered or rounded, in order to allow it to more easily enter the cushion bushing or bore. For the return stroke, if the air is fed via the cushion chamber itself, initial motion would be extremely slow until the cushion nose had cleared the cushion bore; also since the air would be acting only on the cushion nose section, the force available would be low, and possibly not enough to move the piston. The use of a ball-check valve will overcome this difficulty by allowing air to flow freely to the piston face for moving the piston away from the cushion bore on the return stroke.
An important point to appreciate with all cushioned cylinders is that the actual cushioning effect takes place only over a limited portion of the stroke, i.e., a portion of the final movement and if external stops are to be used for arresting the piston movement, most commonly they are placed before the cushion has had a chance to be effective, in which case, the cylinder is working as a non-cushioned type only.
Pneumatic Valves The pneumatic energy is regulated and controlled by pneumatic valves. Functionally, valves are divided into four major groups, viz., direction control, flow control, pressure control, non-return and special type valves. As per construction, valves are sub-grouped as seat valves and sliding or spool valves. Both these types of constructions are frequently used in pneumatic valves. However, spool valves are easier to manufacture. Direction control valves are classified functionally as 2/2, 3/2, 4/2, 5/2, 4/3, 5/3, etc. depending upon the number of port openings and valve positions. Valves are actuated in various methods, viz., manually, mechanically, electrically, pneumatically and by various combined mode of actuation. Specially designed
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 29
Hydraulics & Pneumatic Systems
valves like quick exhaust, time delay, shuttle and twin pressure valves are used to impart various special functions to pneumatic circuits. Pneumatic Controls To control the to and fro motion of a pneumatic cylinder, the air energy has to be regulated, controlled, and reversed with a predetermined sequence in a pneumatic system. Similarly, one may have to control the quantity of pressure and flow rate to generate the desired level of force and speed of actuators. To achieve these functions, valves are used. Valves are fluid power elements used for controlling and regulating the working medium, i.e., the compressed air in the case of a pneumatic system. Broadly valves are used to (i) (ii) (iii) (iv) Start and stop pneumatic energy Control the direction of flow of compressed air Control the flow rate of the compressed air Control the pressure rating of the compressed air
There are various types of valves available in the family of compressed air system but according to their main function, they may be divided into four broad groups: (i) (ii) (iii) (iv) Direction control valves Direction control check valves or non-return valves Flow control valves Pressure control valves
Directional Control Valves (D.C. Valves) Direction control valves are used mainly to direct the flow of the pressure fluid in the desired directions. The main functions of these valves are to start, stop and regulate the direction of air flow and help distribution of air in the desired line. They can be actuated to assume different positions by various actuating mediums, viz. electrical, mechanical, pneumatic, or other modes of control. This results in corresponding connection or disruption of flow between various port
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 30
Hydraulics & Pneumatic Systems
openings. Direction control valve has generally two, three, four or five ports or openings. The openings are termed ways or ports. The ways are designated by letters or alphabets such as: P =compressor line port (pump in the case of hydraulics) R =exhaust port (T in the case of hydraulics) A, B} =working ports to cylinders or motors
Valve Position A direction control valve has two or three working positions generally. They are: (i) (ii) Normal or zero position (natural) or neutral position Working position (the working position can be two or more)
The positions are mostly numbered as 0, 1, 2. Direction control valves are designated to indicate both the number of the ways as well as the number of working positions such as 4/2,3/2 direction control valve etc., (This means a 4 ways/ 2 position valve, 3 ways/ 2position valve etc.
It is necessary to differentiate between neutral and operating positions. In direction control valves with spring return, the neutral position is defined as the position to which the valve returns after the actuating force has been withdrawn. In all fluid power control systems, the neutral position is indicated as "0".
Direction control valves without a spring or a neutral position retain their already attained position after the actuating force has been removed (impulse valve). The starting position or initial position is defined as the position taken up by the valve (due to spring in-case of spring actuated D.C. valve) after installation. The valve attains the working positions when actuated. For representing valves in circuit diagram, symbols are used. Each position in the symbol is denoted by squares. Two positions are represented by two adjacent squares. It should be kept in mind that symbols show only the functional aspect of the valve and not its principle of design or constructional details. For symbols, the following terminology is to be noted (see Figure 2.21 (a), (b), (c) and (d) for valve symbols).
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 31
Hydraulics & Pneumatic Systems
(i) (ii)
A valve position is represented by a square [Figure 2.21(a)]. The number of squares is equal to the number of distinct positions that the valve .can take up [Figure 2.21 (b)].
(iii)
Inside a square, the lines indicate the flow and the arrows, the directions of flow [Figure 2.21 (c)].
(iv)
Cut-offs of air flow is shown by short traverse lines inside the square [Figure 2.21 (c)].
(v)
Connections to inlet and outlet ports are drawn only to a connecting position, i.e. initial position or neutral.
(vi)
The other positions are obtained by shifting the set of squares until the connections match the corresponding lines in the square.
(vii) (viii) (ix)
The connections are denoted by English Capital Letters (alphabets) [Figure 2.21 (d)]. The working line connections are indicated by A, B, C. The compressor line connection (the pressure source) is indicated by P, and return lines by R, S and T.
(x)
The pilot lines are indicated by Z, Y, X. Direction control valve opens and closes, respectively, for an air flow and determines its flow direction.
In symbols like 4/2 etc., the first symbol indicates the number of functional connections or openings, such as four openings. The second symbol in the .designation indicates the number of distinct positions. (Such as two positions).When one talks about a 2/2 direction control valve, it means that it has 2 functional connections and 2 distinct positions. A 2/2 directional control valve is functionally an on-off valve. For example, the valve one finds in a domestic water tap. A similar pneumatic valve can be used as impulse generating or signaling valves for 'impulse valves' in pneumatic controls and also as shut off valves in main line or in any other part of the pneumatic circuit.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 32
Hydraulics & Pneumatic Systems
Application of 2/2 Valve A 2/2 directional control valve may be used to exhaust main valves, e.g., 4/2 pilot operated direction control valves controlled by pressure-release as shown in Figure 2.22.
2.22 2/2 Valve
In the initial position, the passage of air is shut off. When pressure is exerted on the operating pin, the pilot port of the valve is opened and the control line gets exhausted. For operating each pilot line, one 2/2 D.C. valve is used. Figure 2.23. shows the internal construction of a 2/2 direction control valve (spool type).
2.23 Spool type DC
The valve consists of a spool sliding in a finely finished bore when actuated a push button. When the push button is not actuated, no air moves from P to A. This is the neutral or initial
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 33
Hydraulics & Pneumatic Systems
position of the valve. As the spool is moved against the spring, the spool shifts and port P connects to port A and air passes from P to A. This is the working position of the valve.
Basic Construction of Valves As already seen, direction control valves may be basically classified, as per construction into two groups: (i) Seat or poppet valves (ii) Spool or sliding valves Their relative merit and demerits are discussed below:
From the schematic diagram of Figure 2.23 and Figure 2.24, the inside construction of both the types are clear. The sliding valves are now-a-days frequently used in large numbers in pneumatic control systems. At low cost and small working volume, a high efficiency in controlling the flow of pressure is achieved. But if we want a leak-proof arrangement, a seat valve is better. Due to the functional and operational requirement, the sliding piston is fitted with a definite play inside the valve-housing.
In Figure 2.23, a schematic diagram of a 3/2 seat type direction control valve is shown. The valve element shown in the illustration of Figure 2.23 is a schematic only. As shown in the diagram, 'P' is closed to 'A' and 'A' is open to 'R'. The valve seat connecting 'P' to 'A' is closed by a cone shape valve element. Generally, a poppet or ball or even a plate may be used. The seating and unseating of the valve element from the seat are done mostly by a tappet or plunger spring actuated for return movement (not shown in the diagram here). When the port 'P' is made open to 'A', 'R' gets closed. Hence the valve lakes two positions and it has three openings or ports. Hence it is termed a seat type 3/2 direction control valve.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 34
Hydraulics & Pneumatic Systems
2.23 Seat type valve Figure 2.24 (a and b) shows two different designs of spool type 3/2 direction control valve. The construction of this valve may be compared to that of the valve in Figure 2.24, both of which are 3/2 direction control valves. As in Figure 2.24, this valve too has three ports (opening) P, A and R. The valve element is a spool actuated by a push button tappet and a spring. The spool slides over the valve bore (finely finished) inside the valve housing. As it is shown in the figure, 'P' is closed and 'A' opens to R. This is the neutral or initial position of the valve. As the spool is actuated, it shifts and 'A' gets connected to 'P' and 'R' closes. Due to the movement of the spool, the spring gets compressed and when the actuating force on the push button is released, the valve returns to its original position connecting' A' to 'R' and effecting the closure of P.
2.24 Spool type valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 35
Hydraulics & Pneumatic Systems
Figure 2.25 shows a cross sectional schematic view of a seat type 4/2 direction control valve. Inside the valve housing, a number of bores are engraved and are interconnected through a number of valve elements. The ports 'P', 'R', 'A', and 'B' shown in the diagram are designated as: 'P pressure port, 'A' and 'B'-cylinder port and 'R'-exhaust port. In the position shown in the sketch, it is found that 'P' connects to 'A' and 'B' to 'R', When the valve elements are actuated by means of the push button, they are unseated and 'P' connects to 'B' and 'A' to 'R'.
2.25 4/2 DC valve The rated size of the valve depends on the cross-section of the valve port. Through proper shaping of the fluid ports or canals, the loss of pressure may be minimized. The actuating elements of the spool in zero position are spring controlled and for accurate controlling may be designed as pressure compensated.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 36
Hydraulics & Pneumatic Systems
A 5/2 Direction Control Valve In certain designs of direction control valves 5 openings are preferred instead of 4 openings. This ensures easy exhausting of the valve. Figure 2.26 shows a 5/2 direction control valve-spool type design. The spool here slides inside the main bore and according to spool position; the ports get connected or disconnected. The working principle is as follows: (i) Position 1. When the spool is actuated towards outer direction, port P gets connected to 'B' and 'S' remains closed while A gets connected to 'R' (ii) Position 2. When the spool is pushed in the inner direction, port 'P and 'A' get connected to each other and 'B' to 'S' while port 'R' remains closed.
2.26 5/2 DC Valve Overlap in Sliding Spool Valves Overlap in sliding spool valves is understood as that length of valve-housing between the individual pressure chambers, which is sealed by contact with the spool land. However, one must differentiate between overlap in the un-operated condition and overlap during operation. (i) Overlap in the un-operated condition Here the leakage quantity between two pressure chambers is dependent on the accuracy of the spool fit in the housing and specially on the overlap in the un-operated condition. (ii) Overlap during operation this gives information about what takes place during operation. There may be two types of overlap: (i) Negative overlap, e.g., during operation all passages are momentarily connected to each other developing pressure collapse. (ii) Positive overlap e.g. during operation all passages are momentarily closed to each other ensuring no pressure collapse during operation.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 37
Hydraulics & Pneumatic Systems
Control Technique The control technique of direct control valves may be classified into two groups: (i) (ii) Direct controlled units In-direct controlled units
Direct controlling means that the actuation is carried on directly on the valve spool. The actuating medium may vary as desired. The indirect controlling mechanism unit contains two parts: (i) (ii) One pressure-air controlled direction control valve. One direct controlled D.C. valve generally termed as pilot valve.
The pilot valve is necessary to control large valves as the size of the solenoid in relation to the actual valve would be relatively large. In the case of external pilot fluid supply, the required fluid for moving the main spool must be introduced from an external pressure source through ports 'Y' and 'Z'. This is done by means of group selector valves as in the case of cascade design of pneumatic circuits. In the case of internal supply, this can be taken from the pressure port 'P' of the main valve. The pilot fluid can either be drained externally through port 'Y' or internally through port 'R' or 'S' of the main valve, as desired.
Speed Regulators Speed control in pneumatic system is affected by means of a flow control valve. This is done by constricting or throttling a flow passage so that part of the air supply is obstructed in the area of constriction. Both fixed and variable type flow control valves are used in pneumatic systems just as done in the case of hydraulic system. In most cases of pneumatic system, the flow control valve is constructed with an inbuilt check valve so that the controlled flow is directed only in one direction and the reverse flow through the valve is free. This means that whenever one uses such a valve in pneumatic system, one gets flow control and thereby speed control of air cylinder or motor only in one direction. The reverse of the cylinder will be at "normal speed determined by the rated port capacity of the valve. Flow control valves are available in two modes (i) (ii) Fixed flow control variable flow control
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 38
Hydraulics & Pneumatic Systems
In fixed flow controlling, the control passage is not adjustable. A valve of this type is shown in Figure 2.27. But in variable control valve, an adjustable control needle is positioned at any place of the flow passage to regulate the flow as per need of flow quantity. This is done by screwing a taper needle inside the control passage. In Figure 2.27 (a), the internal construction of a nonreturn type pneumatic flow control valve with the inbuilt check valve is shown. Mostly a ball and spring type check valve is used, but there are many other varieties of design available from various manufacturers of such valves. Figure 2.27 (b) shows the internal construction of a check valve where flow of air is permitted only in one direction as indicated by the arrow. It should be kept in mind that whenever a flow control valve is used in a pneumatic circuit, it will provide undesired amount of pressure loss and other resistances, which may hamper the proper functioning of the system.
2.27 Flow control valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 39
Hydraulics & Pneumatic Systems
Hence, judicious choice of flow controlling device of such a valve is most important as otherwise one may have to incur good amount of energy loss resulting in loss of impact force, speed, etc. Moreover, the position of flow control valve in the circuit diagram may .also play an important role in minimizing the flow losses. Generally, the air is to be exhaust throttled from a cylinder in lieu of 'in-feed' throttling of air to cylinder. As a thumb rule, in-feed throttling, i.e., supply air throttling is done for smaller diameter, cylinder (say, up to 25 mm dia.). For bigger size cylinder, exhaust throttling is most effective.
In a variable type flow control valve, it is better to lock the needle position by a lock nut in order to ensure the desired flow quantity to pass through that position. Otherwise, the needle position may change subjecting the valve to allow either less or more energy than needed. It should be remembered that the air-energy passing through a particular passage per unit time will depend on the diameter of the restricted area which may be increased or decreased by changing the position of the controlling needle. If the diameter of the flow passage is enlarged due to unwanted pulling out of the needle, the amount of air passing out per unit time will increase, thus increasing the speed of the actuator which may not be desirable for that particular design of the circuit diagram. Application of this valve for speed regulation of forward and inward stroke in a double acting cylinder is shown in Figure 2.28.
2.28 Application of variable type flow control valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 40
Hydraulics & Pneumatic Systems
Quick Exhaust Valve With the use of flow control valve in a pneumatic circuit, the actuator speed is controlled, which means that the speed of the actuator may be reduced over its normal speed to suit a particular need of the system design. But is it possible to increase the speed of a pneumatic cylinder over its normal speed? In a normal pneumatic system, the actuator speed will be determined by the rating of the direction control valve (D.C.) and hence, it may be difficult under normal condition to feed more air-energy to an actuator than what is permissible through the D.C. valve. Sometimes, special cylinders can be designed with an in-built air chamber which may induce higher speed. But the cost of such cylinders may be more. Figure 2.29
2.29 Quick exhaust valve But it may be possible to induce higher speed in a cylinder by avoiding the exhaust air to pass through the direction control valve from the cylinder so that the air energy can act quickly. When the air is fed to the piston side of the cylinder, the air in the rod-end side of the cylinder can be exhausted to the atmosphere quickly by using a special valve. This valve is called a quickexhaust valve (shown in Figure 2.29). Here, the air flowing to the cylinder from the direction control valve will pass to 'P' port of the quick exhaust valve and from the 'P' port, it will pass to
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 41
Hydraulics & Pneumatic Systems
the 'A' port of the quick exhaust valve and then to the cylinder. But the return air from the cylinder will exhaust through 'A' and 'R' to the atmosphere without travelling through the 'P' port and thus avoids the direction control valve as it normally happens. Thus the resistance to piston movement is eliminated to some extent and the speed of the cylinder is accelerated proportionately by that amount of less resistance.
Time Delay Valve The time delay valve shown in Figure 2.30 consists of an in-built air reservoir, an in-built nonreturn flow control valve and a pilot controlled spring return 3 way 2 position direction control valve. This valve is used in the pneumatic system to initiate a delayed signal. When the compressed air is supplied to the port 'P' of the valve, it is prevented from flowing to port 'A' from 'P', as this is blocked by the spring actuated spool. Air is accumulated in an in-built reservoir of the valve from the pilot control port 'Z', the control passage of the same being controlled by the needle of the in-built throttle valve. Pressure starts building up here.
When the pressure needed to push the spool is built-up in the reservoir, the pilot spool of the 3/2 direction control valve shifts, thus opening port 'P of the main valve to. A' and closing 'R'. The time required to build-up the pressure in the reservoir, is the amount of delay time offered by the time delay valve. With further increase of pressure, the inbuilt check valve opens; the air from the reservoir gets exhausted and the valve spool returns to its original position.
2.30 Time delay valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 42
Hydraulics & Pneumatic Systems
Logic Functions Pneumatic valves are capable of providing systematic control of motion and time with predetermined logical sequence of complete function of the system. Because of the logic characteristics of the pneumatic elements, they are very often used in the design of logic circuit diagrams. Pneumatic logic control is the brain which can start, keep in order, bold in check, release instructions or stop machine function or even terminate a process operation. As one's mind tells one's arms and legs to move, stop or do any other function, logic controls do the same for the machine. The basic logic functions have been termed NOT, OR, AND and MEMORY. These functions alone or in combination will perform certain amount of brain work for the machine. Two important elements in the family of pneumatic valves used for logic control, are discussed here. These are: (i) (ii) Twin-pressure valve Shuttle valve.
Twin pressure valves are associated with AND-logic and shuttle valve with OR-logic. Brief description of both are given below
Shuttle Valve A shuttle valve is shown in Figure 2.31. The valve consists of a valve body and a synthetic ball or a cuboid valve element moving inside the bore in the valve housing. There are three openings P1, P2 and A. If an air signal is fed to port P1 the ball moves, closing port P2 and air passes to 'A'. If the air is fed to port P2, port P1 is closed and air moves to 'A'. If air is fed simultaneously to port P1 and P2 then air moves to 'A' either from P1 or P2 or from both. This element is also called an OR GATE. Figure 2.31(b) shows the symbol.
2.31 Shuttle valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 43
Hydraulics & Pneumatic Systems
Twin Pressure Valve In Figure 2.32 (a), a schematic sketch of a twin pressure valve is shown. This valve is also called an AND GATE. Here an output is produced if both the input signals are fed. This has three ports-two signal receiving ports 'A' and 'B' (input) and .an outlet port 'Y'. When signal is fed to 'A' first, the valve spool moves towards 'B', closing the air passage from 'A' to 'Y' and hence the air from 'B' moves to 'Y'. The reverse takes place if air is fed first to 'B'. Then air moves from 'A' to 'Y'. If air is fed simultaneously to both 'A' and 'B', then the spool remains in its already acquired position and air may pass to 'Y' from both 'A' and 'B' or from any of these two depending on the air pressure and spool position. Application of this AND GATE is shown in Figure 2.32 (b).
2.32 AND valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 44
Hydraulics & Pneumatic Systems
3. Manual Pneumatics
3.1 Symbols and descriptions of components
Chapter 03
The development of pneumatic systems is assisted by a uniform approach to the representation of the elements and the circuits. The symbols used for the individual elements must display the following characteristics: Actuation and return actuation methods Number of connections (all labeled for identification) Number of switching positions General operating principle Simplified representation of the flow path
The symbols for the energy supply system can be represented as individual elements or as combined elements. If a standard and common air supply is used for all components, then the simplified symbols can be used
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 45
Hydraulics & Pneumatic Systems
3.1 Direction control valves Symbol development
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 46
Hydraulics & Pneumatic Systems
The directional control valve is represented by the number of controlled connections, the number of positions and the flow path. In order to avoid faulty connections, all the inputs and outputs of a valve are identified.
3.2 Directional control valves ports and positions (ways)
The control valves are actuated by various actuating mechanisms depending on their usage. The following figure shows various methods of actuation that are generally used in a pneumatic circuit.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 47
Hydraulics & Pneumatic Systems
3.3 Methods of actuation
The non-return valve (check valve) is the basis for the development of many combined components. There are two main configurations for non-return valves, with and without the spring return. In order to release flow, the pressure force on the spring return design must be greater than the spring force.
3.4 Non-return valves and derivatives
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 48
Hydraulics & Pneumatic Systems
Most flow control valves are adjustable and permit flow control in both directions. The arrow shows that the component is adjustable but does not refer to the direction of flow; it is diagrammatic only. In the case of the one-way flow control valve, a non-return valve is switched in parallel with the flow control valve. Flow control is affected in one direction only.
3.5 Flow control valves The linear actuators or cylinders are described by their type of construction and method of operation. The single-acting cylinder, the double-acting cylinder and the rod-less cylinder form the basis for design variations. The use of cushioning to reduce loads on the end caps and mountings during deceleration of the piston is important for long-life and smooth operation. The cushioning piston is shown on the exhaust air side of the piston. The arrow indicates adjustable cushioning and not the direction of cushioned motion.
3.6 Linear actuators
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 49
Hydraulics & Pneumatic Systems
Rotary actuators are divided into continuous motion and limited angle of rotation. The air motor is normally a high speed device with either fixed or adjustable speed control. Units with limited angle of rotation are fixed or adjustable in angular displacement. The rotary actuator may be cushioned depending upon the load and speed of operation.
3.7 Rotary actuators Auxiliary symbols: There are a number of important symbols for accessories which are utilized in conjunction with pneumatics.
3.8 Auxiliary symbols
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 50
Hydraulics & Pneumatic Systems
3.2 Development of pneumatic systems The solution to a control problem is worked out according to a system with documentation playing an important role in communicating the final result. The circuit diagram should be drawn using standard symbols and labeling. Comprehensive documentation is required including most of the following: Function diagram Circuit diagram Description of the operation of the system Technical data on the components
Supplementary documentation comprising Parts list of all components in the system Maintenance and fault-finding information Spare parts list
There are two primary methods for constructing circuit diagrams: The so-called intuitive methods The methodical design of a circuit diagram in accordance with prescribed rules and instructions Whereas much experience and intuition is required in the first case and above all, a great deal of time where complicated circuits are concerned; designing circuit diagrams of the second category requires methodical working and a certain amount of basic theoretical knowledge. Regardless of which method is used in developing the circuit diagram, the aim is to end up with a properly functioning and reliably operating control. Whereas previously emphasis was placed on the least expensive hardware solution, more importance is now attached to operational reliability and ease of maintenance by a clear layout and documentation. This inevitably leads to increased usage of methodical design processes. In such cases, the control is always constructed in accordance with the given procedure and is less dependent upon personal influences from the designer. In many cases, however, more components will be required for the methodical solution than in a circuit devised by the intuitive method.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 51
Hydraulics & Pneumatic Systems
3.3 Direct control of a pneumatic cylinder The simplest level of control for the single or double-acting cylinder involves direct control signals. With this, the cylinder is actuated directly via a manually or mechanically actuated valve, without any intermediate switching of additional directional control valves. If the port sizes and the flow values of the valve are too large, the operating forces required may be too great for direct manual operation.
Reference values for limits of direct cylinder control: Cylinder with piston diameter smaller than 40 mm Valves with connection sizes smaller than 1/4"
3.3.1 Example 1: Direct control of a single-acting cylinder A single-acting cylinder of 25 mm diameter is to clamp a component when a push button is pressed. As long as the push button is activated, the cylinder is to remain in the clamped position. If the push button is released, the clamp is to retract.
Solution: The control valve used for the single-acting cylinder is the 3/2-way valve. In this case, since the cylinder is of small capacity, the operation can be directly controlled by a push button 3/2-way directional control valve with spring return.
On operating the push button the air passes through the valve from port 1to 2 via the valve 1S into the piston chamber of the cylinder 1A. The pressure builds up and advances the piston rod against the force of the cylinder return spring. On release of the button, the valve spring returns
The 3/2 way valve to its initial position and the cylinder retracts. The air returns from the cylinder via the exhaust port 3.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 52
Hydraulics & Pneumatic Systems
In this and the following circuit diagrams, the service unit (02) and the start-up valve (OS) have also been drawn in.
3.3.2 Exercise 2: In-direct control of a single-acting cylinder A single-acting cylinder with a large piston diameter is to clamp a work-piece following actuation of a push button. The cylinder is to retract once the push button is released.
Solution: In the initial position, the single-acting cylinder 1A is retracted. A spring return 3/2 way pneumatic valve is used to actuate the cylinder. Connection1 of the valve 1V is closed; connection 2 is exhausted to atmosphere via connection 3.
The valve 1S is actuated when the push button is activated and pressure is applied to the control port 12 of the control valve 1V. The control valve 1V is actuated against spring force and is thus switched to flow. The pressure building up at the cylinder piston causes the cylinder piston rod of the single-acting cylinder to extend. The signal at the control port 12 remains as
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 53
Hydraulics & Pneumatic Systems
long as the push button is operated. Once the piston rod has reached end position, it returns only after the push button has been released.
When the push button is released, the valve 1S returns to its initial position. Control port 12 of the control valve 1V exhausts to atmosphere and the signal is reset. The control valve also returns to initial position. The return spring causes the cylinder to retract. The air from the cylinder chamber is exhausted to atmosphere via the control valve.
Assignment questions: Direct and indirect control of double acting cylinders
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 54
Hydraulics & Pneumatic Systems
3.3.3 Example 3: The logic AND function The piston rod of a double-acting cylinder is to advance when the 3/2 way roller lever valve is actuated and the push button of the 3/2-way valve is actuated. If either of these is released, then the cylinder is to return to the initial position.
Solution: The inputs 1 and 1(3) of the dual-pressure valve 1V1 are connected to the working ports 2 of the valves 181 and 182. The 3/2-way roller lever valve 182 is actuated by the insertion of a work-piece and then creates a signal at one input of the dual-pressure valve. 8ince only one input is actuated, the AND condition has not been fulfilled and the output of the dual-pressure valve remains closed. If the push button of the 3/2-way valve 1S1 is now also actuated, a signal will also be applied at the second input. The AND condition is now fulfilled and a signal is
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 55
Hydraulics & Pneumatic Systems
generated at the output 2 of the dual-pressure valve. The 5/2 way pneumatic valve 1V2 switches, the piston side of the cylinder is pressurized and the piston rod advances. If one of the two valves 1S1 or 1S2 is no longer actuated, then the AND condition will no longer be fulfilled and the signal at the output of the dual pressure valve will be reset. The signal pressure at the control port 14 of the control element 1V2 is exhausted to atmosphere via the reset valve 1S1 or 1S2. The control element 1V2 switches back. The pressure building up on the piston rod side ensures the retraction of the piston rod.
An alternative solution to using the dual pressure valve is to use two 3/2 way valves in series. Here the signal is passed from push-button valve 1S1 to the roller lever valve 1S2 and then on to the control element 1V2 but only if both valves 1S1 and 1S2 are operated, i.e. when the AND condition is met. When a valve is released, the signal at the control element is reset and the piston rod retracts.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 56
Hydraulics & Pneumatic Systems
3.3.4 Example 4: The logic OR function A double-acting cylinder is to advance if one of two push buttons is operated. If the push button is then released, the cylinder is to retract.
Solution: The inputs 1 and 1(3) of the shuttle valve 1V1 are connected to the working connections of the valves 1S1 and 1S2. Upon operation of one of the push buttons, the corresponding valve 1S1 or 1S2 is actuated and a signal is generated at the 1 or 1(3) side of the shuttle valve. The OR condition is fulfilled and the signal passes through the shuttle valve and is emitted at port 2. The signal pressure is prevented from escaping via the exhaust of the unactuated valve by closing the line in the shuttle valve. The signal effects the switching of the control element 1V2. The piston side of the cylinder is pressurized and the piston rod advances. When the actuated push button is released, the signal pressure is relieved via the valves 1S1 and 1S2 and the control element is switched back to its initial position. The pressure now building up on the piston rod side ensures the retraction of the piston rod.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 57
Hydraulics & Pneumatic Systems
Extended problem definition 1 A double pilot valve should be fitted for the control of the cylinder. If the cylinder is to retract on reaching its fully extended position, roller lever valves should be used as limit valves to confirm that this position has been reached.
Extended problem definition 2 One of the push buttons need only be operated for a short duration and the cylinder will fully extend, since the effect of the signal at input 14 of the 5/2-way double pilot valve 1V2 is maintained until a signal is applied at input 12. As soon as the piston rod has reached the forward end position, the limit switch 183 generates a signal at input 12, and the valve 1V2 is reversed. The retracted end position of the piston rod can also be sensed. This requires an additional limit switch.
Solution: The addition of the dual pressure valve 1V2 and the roller limit switch 1S4 ensures that the cylinder is fully retracted before the cylinder can be extended again. The condition for a renewed advancing of the piston rod is the actuation of one of the valves 1S1 or 1S2 and the limit switch 1S4. When the cylinder is advanced at position 1S3, the cylinder retracts even if the valves 1S1 and 1S2 are still operated since the limit switch 1S4 is inactive.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 58
Hydraulics & Pneumatic Systems
3.3.5 Example 5: Memory circuit and speed control of a cylinder The piston rod of a double-acting cylinder is to advance when a 3/2-way push button valve is actuated manually. The cylinder is to remain advanced until a second valve is actuated. The signal of the second valve can only take effect after the first valve has been released. The cylinder is to then return to the initial position. The cylinder is to remain in the initial position until a new start signal is given. The speed of the cylinder is to be adjustable in both directions.
Solution: Upon operation of the push-button, the valve 1S1 is actuated, so that a signal is generated at the pilot port 14 of the control element 1V1. The control element 1V1 switches, the piston side of the cylinder is pressurized and the piston rod advances. Whilst the supply air flows unrestricted through the one-way flow control valve 1V2, the air displaced via the one-way flow control valve 1V3 on the piston rod side is restricted. The advancing speed of the piston rod is therefore reduced. The switching status of the valve 1V1 is maintained, if the valve 1S1 is released, since this is a memory valve. If the valve 1S2 is actuated, a signal is generated at the control port 12 of the control element. The valve switches, pressure is applied at the piston rod side of the cylinder and the piston rod retracts. Exhaust air flow control is effected via the one way flow control valve 1V2. If the valve 1S2 is released, the switching position of the control element 1V1 is maintained due to its memory function.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 59
Hydraulics & Pneumatic Systems
The supply air is transferred through the by-pass check valve of the flow control valves, giving unrestricted supply to the cylinder. The flow control influences the volumetric flow rate of the exhaust air and as such the piston speed. Due to the different volumes of air to be displaced on the piston side and on the piston rod side, the restrictors must be set at different levels to obtain the same retracting and advancing speed.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 60
Hydraulics & Pneumatic Systems
3.3.6 Example 6: Pressure dependent control A plastic component is embossed using a die driven by a double-acting cylinder. The die is to advance and emboss the plastic when a push button is operated. The return of the die is to be effected when a preset pressure is reached. The embossing pressure is to be adjustable.
Solution: If the piston rod is not in its initial position, the circuit must be reset by operating the manual override on the 5/2-way double pilot valve. All valves are un-actuated in the initial position, pressure is applied at the piston rod side of the cylinder and the piston rod remains in the retracted state.
Actuation of the push button switches the valve 1S to flow and a signal is applied at the control port 14 of the double pilot valve 1V2. The valve 1V2 switches, pressure is applied at the piston side of the cylinder and the piston rod advances. The switching status of the double pilot valve 1V2 remains intact if the push button 1S is released. When the piston rod reaches the workpiece, travel is stopped and pressure starts to build up on the piston side. The increasing pressure causes the force of the die to increase.
The control port 12 of the pressure sequence valve 1V1 is connected to the pressure line on the piston side of the cylinder 1A. When the pressure in the cylinder reaches the value set on the pressure sequence valve, the 3/2-way valve switches. A signal is now applied at the control port 12 of the valve 1V2. The valve 1V2 switches, pressure is applied at the piston rod side of the cylinder and the piston rod retracts. During retraction, the response pressure set on the
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 61
Hydraulics & Pneumatic Systems
pressure sequence valve is not met and the pressure sequence valve returns to its initial position.
The response pressure set on the pressure sequence valve must be lower than the system pressure in order to ensure reliable switching. Should the advancing piston rod meet an obstacle, then it will retract again before reaching the embossing position.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 62
Hydraulics & Pneumatic Systems
3.3.7 Example 7: The time delay valve A double-acting cylinder is used to press together glued components. Upon operation of a push button, the clamping cylinder extends. Once the fully advanced position is reached, the cylinder is to remain for a time of T= 6 seconds and then immediately retract to the initial position. The cylinder retraction is to be adjustable. A new start cycle is only possible after the cylinder has fully retracted.
Solution: If the piston rod is not in its initial position, the circuit must be reset by operating the manual override on the 5/2-way double pilot valve. In the initial position, all valves with the exception of the roller lever valve 182 (limit switch) are un-actuated. Pressure is applied at the piston rod side of the cylinder and the piston rod remains in the retracted state.
Valve 1S1 and the limit switch 1S2 must be 'actuated as a start condition. The limit switch 1S2 is not actuated unless the piston rod is in its initial position. If the start condition is fulfilled, the dual-pressure valve 1V1 is switched to flow and a signal is applied at the control port 14 of the double pilot valve 1V3. The valve 1V3 reverses, pressure is applied at the piston side of the cylinder and the piston rod advances. The advancing speed is dependent on the setting of the one-way flow control valve 1V5 (exhaust air control). After a short advancing travel, the piston rod releases the limit switch 1S2.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 63
Hydraulics & Pneumatic Systems
3.4 Control of multiple actuators In the case of multiple cylinder circuits, a clear definition of the problem is important. The representation of the desired motion of all actuators is described using the displacement-step diagram. The special conditions for the start of the sequence must also be defined. If the motion diagram and auxiliary conditions have been clearly defined, drawing of the circuit diagram can commence. The circuit diagram should be designed.
In order for a circuit to operate, it is essential to avoid overlapping signals. By an overlapping signal, we understand signals applied simultaneously at the two control ports of a double pilot valve. The following valves can be used to eliminate signal overlap: roller lever valves with idle return or toggle lever valves, time delay valves, reversing valves or sequencers.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 64
Hydraulics & Pneumatic Systems
To provide a better understanding of the methods, some examples are given for the use of roller lever valves with idle return and reversing valves.
3.4.1 Example 1: Co-ordinated motion Two cylinders are used to transfer parts from a magazine onto a chute. When a push button is pressed, the first cylinder extends, pushing the part from the magazine and positions it in preparation for transfer by the second cylinder onto the out-feed chute. Once the part is transferred, the first cylinder retracts, followed by the second. Confirmation of all extended and retracted positions are required.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 65
Hydraulics & Pneumatic Systems
Displacement Step diagram
Roller lever valves with idle return are to be used as limit switches to detect the return and advance positions of the piston rod. The manual signal input is effected via a 3/2-way valve. In the initial position, both cylinders are in the retracted state, the limit switches 2S1 and 1S2 are actuated.
The start condition for a cycle is that the limit switch 2S1 and push button 1S1 must be actuated. The motion cycle can be determined from. the displacement-step diagram and is subdivided into the following steps:
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 66
Hydraulics & Pneumatic Systems
Step 1 Step 2 Step 3 Step 4 Step 5 1S1 & 2S1 actuated 1S3 actuated 2S2 actuated 1S2 actuated 2S1 actuated => => => => => Cylinder 1A advances Cylinder 2A advances Cylinder 1A retracts Cylinder 2A retracts Initial position
If push button 1S1 is actuated, the 5/2 way double pilot valve 1V2 switches, and the piston rod of the cylinder 1A advances. The part is ejected from the magazine. When cylinder 1A reaches the forward end position, the limit switch. 1S3 is actuated. The 5/2-way double-pilot valve 2V then switches and the piston rod of the cylinder 2A advances. The part is moved onto a chute. When cylinder 2A reaches its forward end position, the limit switch 2S2 switches. This causes the control element 1V2 to switch and the piston rod of the cylinder 1A retracts. When the retracted end position of the cylinder 1A has been reached, the limit switch 182 switches and the control element 2V switches. The piston rod of the cylinder 2A retracts and actuates the limit switch 2S1 upon reaching its retracted end position. The initial position of the system has now been reached again. A new cycle can be started by actuating the push button 1S1.
3.4.2 Example 2: Signal overlap In co-ordinated motion control, the 5/2-way memory valve can only switch positions when a single pilot signal is present. If two signals are operated simultaneously, i.e. both pilot signals on the 5/2 way valve are active, a signal overlap problem occurs. Several possibilities are available for the solution of this problem. However, first the signal overlap points must be established.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 67
Hydraulics & Pneumatic Systems
Where does signal overlapping occur?
Signal overlapping occurs in steps 1 and 3. In the initial position, a signal is applied at the control port 12 of the double pilot valve 1V2 via the actuated limit switch 2S1. If push button 1S1 is actuated, a signal is applied at the control port 14 of the double pilot valve 1V2. This signal overlapping can be eliminated by the use of roller lever valves with idle return. These valves are actuated in one direction of movement only by the piston rod and are configured in such a way that actuation is triggered just shortly before reaching the respective initial and end position.
In step 3, a signal overlap occurs at the double pilot valve 2V. The advancing piston rod of the cylinder 1A actuates the limit switch 1S3. The piston rod of the cylinder 2A advances and actuates the limit switch 2S2, which triggers the signal for the immediate retracting of the piston rod. If the limit switch 1S3 is still switched at this point two signals are applied simultaneously at the double pilot valve 2V and the valve cannot switch.
Here too, signal overlapping can be eliminated, if the limit switch 1S3 is a roller lever valve with idle return. In the circuit diagram, an arrow is drawn on the line of the limit switches 2S1 and 1S3. The direction of the arrow indicates in which direction the over travel of the roller lever valve with idle return leads to actuation. No actuation takes place in the case of over travel in the opposite direction.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 68
Hydraulics & Pneumatic Systems
The use of roller lever valves with idle return to eliminate signal overlapping has the following disadvantages: The end position cannot be sensed accurately. Function may be impaired as a result of contamination. Fast control systems are not possible.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 69
Hydraulics & Pneumatic Systems
3.4.3 Example 3: Signal elimination by reversing valves Signal elimination by means of a reversing valve is a frequently used solution. This basic idea is to allow the signal to be active only for as long as is required. This is achieved by blocking the signal downstream of the signal element by means of a reversing valve, or by supplying energy to the signal element only when the signal is required. A double pilot valve is used to effect the reversal.
A reversing valve is to be used instead of roller lever valves with idle return to eliminate signal overlap. It is necessary to remove the signals at the 5/2-way double solenoid valves 1V and 2V in good time in order to cancel the signal overlaps. To achieve this, the pressure supply lines of the limit switches 2S1 and 1S3 must be exhausted quickly before the counter signal is applied, i.e. no opposing signals at the memory valves 1V and 2V.
Solution: The reversing valve 0V supplies the lines P1 and P2 with compressed air or exhausts these to atmosphere. In the initial position, both piston rods are retracted, the limit switches 2S1 and 1S2 are actuated and pressure is applied at the control ports 12 of the 5/2 way double pilot valves1Vand2V.
Following actuation of the push button 1S1, the reversing valve 0V switches. The line P1 is supplied with compressed air and line P2 is exhausted. The limit switch 2S1 remains actuated, but the control port 12 of the valve 1V is unpressurised. Pressure is applied at the control port 14 of the valve 1V and the valve reverses. The piston rod of the cylinder 1A advances, whereby the limit switch 1S2 is reset and the control port 14 of the reversing valve 0V exhausted. The limit switch 1S3 is actuated when the end position is reached and the valve 2V reverses. The piston rod of the cylinder 2A advances. After the piston rod has left the initial position, the limit switch 2S1 is reset. Upon reaching the end position, the limit switch 2S2 is actuated. The reversing valve 0V switches, line P2 is supplied with system pressure and line P1 become unpressurised. The valve 2V switches and the piston rod of the cylinder 2A retracts. When the initial position is reached, the limit switch 2S1 is actuated, the valve 1V switches and the piston rod of the cylinder 1A retracts. When the piston rod reaches its initial position, the limit switch 1S2 is actuated and the system is in the initial state again. A new cycle can now be started by pressing push button 1S1.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 70
Hydraulics & Pneumatic Systems
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 71
Hydraulics & Pneumatic Systems
3.4.4 Example 4: Reversing valves Using a transfer station, parts are to be transferred from a vertical magazine onto a chute. The parts are pushed out of the magazine by cylinder 1A and then transferred onto the chute by cylinder 2A. The piston rod of the cylinder 1A may only extend once the cylinder 2A has retracted. The cycle is to start when a start button is pressed. Limit switches are used to confirm cylinder positions.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 72
Hydraulics & Pneumatic Systems
Solution: In the circuit diagram, all signal input elements are connected in the active state. This means that the input elements are directly supplied with compressed air. In this way, the compressed air does not have to flow through all the linked valves before a control process is triggered. Pressure drop is reduced and control is faster. The input elements are connected to the reversing valves via dual-pressure valves.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 73
Hydraulics & Pneumatic Systems
The sequence has three steps and signal overlap is potentially a problem at two positions. The first step is the advance of cylinder 1A, followed by step 2, the immediate retraction of cylinder 1A. Therefore it is possible that overlap occurs on the valve 1V1 at ports 14 and 12, unless the reversing valve technique is used. The valve 2S1 is held operated initially by cylinder 2A, but the push button valve 1S1 is a momentary push button, and in most cases, it would not be expected that the start button be operated for an extended period. Therefore the valve 1S1 may be used as the means of cancelling the, first overlap signal.
The second overlap problem occurs with cylinder 2A and valve 2V1. Here the problem occurs in step 3, when the cylinder is to retract immediately after the extension is completed. The first of the two signals on the control valve 2V1 must be short in duration.
To remove the overlap the reversing valve circuit is developed with three lines feeding three steps. The lines P1 to P3 represent the individual steps 1 to 3.
In step 1 the cylinder 1A extends, therefore the pilot signal 1V1 at port 14 is fed via line P1. Two movements occur in step 2: cylinder 1A retracts and cylinder 2A extends. Therefore line P2 feeds the pilot signals 1V1 at port 12 and 2V1 at port 14.
In the third step, the piston rod of cylinder 2A is to retract due to the pilot signal 2V1 at port 12 which is fed from line P3.
The input side of the circuit shows that the valves 1S1 and 2S1 have to be operated to start the cycle. The valve 183 operates next and is fed to port 12 of reversing valve OV6.This switches to activate line P2 and exhausts line P1. The next movements are cylinders 1A back and 2A out, confirmed by valves 2S2 and 1S2 which are series connected to the 12 port of the reversing valve 0V5. The valve 0V5 switches, the line P2 is exhausted and line P3 activated. The cycle is now prepared for a start condition, once valve 2S1 is initiated by cylinder 2A retracting. Actuation of the start button 1S1 causes the cycle to restart.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 74
Hydraulics & Pneumatic Systems
Chapter 04
4. Electro Pneumatics
4.1 Introduction Electro Pneumatic control integrates pneumatic and electrical technologies, is more widely used for large applications. In Electro Pneumatics, the signal medium is the electrical signal either AC or DC source is used. Working medium is compressed air. Operating voltages from around 12 V to 220 Volts are often used. The final control valve is activated [setting] by solenoid actuation. The resetting of the valve is either by spring [single Solenoid] or using another solenoid [Double solenoid Valve]. More often the valve actuation/reset is achieved by pilot assisted solenoid actuation to reduce the size and cost of the valve. Control of Electro Pneumatic system is carried out either using combination of Relays and Contactors or with the help of Programmable Logic Controllers [PLC]. A Relay is often is used to convert signal input from sensors and switches to number of output signals [either normally closed or normally open].
Signal processing can be easily achieved using relay and contactor combinations. A Programmable Logic Controller can be conveniently used to obtain the out puts as per the required logic, time delay and sequential operation. Finally the output signals are supplied to
the solenoids activating the final control valves which control the movement of various cylinders. The greatest advantage of electro pneumatics is the integration of various types of proximity sensors [electrical] and PLC for very effective control. As the signal speed with electrical signal, can be much higher, cycle time can be reduced and signal can be conveyed over long distances.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 75
Hydraulics & Pneumatic Systems
In Electro pneumatic controls, mainly three important steps are involved:
Signal input devices -Signal generation such as switches and contactor, various types of contact and proximity sensors Signal Processing Use of combination of Contactors of Relay or using Programmable Logic Controllers Signal Out puts Out puts obtained after processing are used for activation of solenoids, indicators or audible alarms
4.1 Signal processing steps
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 76
Hydraulics & Pneumatic Systems
4.2 Symbols and descriptions of components The development of electro-pneumatic systems is assisted by a uniform approach to the representation of the elements and the circuits. The symbols used for the individual elements must display the following characteristics: Actuation and return actuation methods Number of connections (all labeled for identification) Number of switching positions General operating principle Simplified representation of the flow path
Symbols of Switches - Contactors
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 77
Hydraulics & Pneumatic Systems
Symbol- Single solenoid Valve
2
Single Solenoid Valve- Pilot assisted
2
Double Solenoid Valve- Pilot assisted
Symbolic Representation for Solenoids and Relays
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 78
Hydraulics & Pneumatic Systems
Types of Relays
Signal flow in Electro Pneumatic Circuit
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 79
Hydraulics & Pneumatic Systems
4.3 Control of Double Acting Cylinder 4.3.1 Indirect Action of Double Acting Cylinder Using a Relay
+24V F=0 S1
K1
K1
Y1
Y1 5 1 3
0V
4.3.2 Indirect Actuation of Double Acting Cylinder for Forward and Return Motion
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 80
Hydraulics & Pneumatic Systems
4.3.3 Logic Circuits
OR Logic Circuit
AND Logic Circuit
4.3.4 Use of Proximate Sensor to Interrogate the End Positions of Piston
S1 F= 0
S2
+24V
12
56
Start Sw itch Sensor 2
4 Y1 5 1 3 0V 2 Y2 K1 Y1 K2 Y2 K2
Sensor 1 S1
S2
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 81
Hydraulics & Pneumatic Systems
4.3.5 Exercise A Double acting cylinder is to be controlled using by a final control valve with single solenoid and spring reset The piston is required to advance on actuation of a manual detent push button switch and should continuously reciprocate from home to forward end position. The operation should stop after release the detent push button. Holding circuit can be used for this purpose
+24V S1 F=0 K1 K1 S2 1 2 3
S1
S2 Y1
Y1 5 1 3 0V K1
2 3
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 82
Hydraulics & Pneumatic Systems
5. Sensors in pneumatic systems
5.1 Sensors 5.1.1 Push button and control switches
Chapter 05
Switches are installed in circuits to apply a current to a load or to interrupt the circuit. These switches are divided into pushbuttons and control switches. Control switches are mechanically detented in the selected position. The switch position remains unchanged until a new switch position is selected. Example: Light switches in the home. Push button switches only maintain the selected position as long as the switch is actuated (pressed). Example: Bell push.
In the case of a normally open contact Figure 5.1, the circuit is open if the switch is in its initial position (not actuated). The circuit is closed by pressing the pushbutton - current flows to the load. When the plunger is released, the spring returns the switch to its initial position, interrupting the circuit.
5.1 Normally open contact
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 83
Hydraulics & Pneumatic Systems
5.2 Normally closed contact In this case, the circuit is closed when the switch is in its initial position. The circuit is interrupted by pressing the pushbutton. Figure 5.2
5.1.2 Change-over contact The change-over contact combines the functions of the normally open and normally closed contacts in one device. Change-over contacts are used to close one circuit and open another in one switching operation. The circuits are momentarily interrupted during change-over. Figure 5.3
5.3 Change-over contact
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 84
Hydraulics & Pneumatic Systems
5.1.3 Sensors for measuring displacement and pressure Sensors have the task of measuring information and passing this on to the signal processing part in a form that can easily be processed. In electro-pneumatic controllers, sensors are primarily used for the following purposes: To detect the advanced and retracted end position of the piston rod in cylinder drives To detect the presence and position of work-pieces To measure and monitor pressure 5.2 Limit switches A limit switch is actuated when a machine part or work-piece is in a certain position. Normally, actuation is effected by a cam. Limit switches are normally changeover contacts. They can then be connected As required As a normally open contact, normally closed contact or change over contact.
5.4 Limit switches
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 85
Hydraulics & Pneumatic Systems
5.3 Proximity switches Proximity switches In contrast to limit switches, proximity switches operated contactless (noncontact switching) and without an external mechanical actuating force. As a result, proximity switches have a long service life and high switching reliability. The following types of proximity switch are differentiated: Reed switch Inductive proximity switch Capacitive proximity switch Optical proximity switch
5.3.1 Reed switch Reed switches are magnetically actuated proximity switches. They consist of two contact reeds in a glass tube filled with inert gas. The field of a magnet causes the two reeds to close, allowing current to flow. In reed switches that act as normally closed contacts, the contact reeds are closed by small magnets. This magnetic field is overcome by the considerably stronger magnetic field of the switching magnets. Reed switches have a long service life and a very short switching time (approx. 0.2 ms). They are maintenance-free, but must not be used in environments subject to strong magnetic fields (for example in the vicinity of resistance welders).
5.5 Reed switches Department of Mech. & Mfg. Engg. M.I.T Manipal Page 86
Hydraulics & Pneumatic Systems
Electronic sensors: Inductive, optical and capacitive proximity switches are electronic sensors. They normally have three electrical contacts. Contact for supply voltage Contact for ground Contact for output signal
5.3.2 Inductive proximity sensors An inductive proximity sensor consists of an electrical oscillator (1), a flip-flop (2) and an amplifier (3). When a voltage is applied, the oscillator generates a high-frequency alternating magnetic field that is emitted from the front of the sensor. If an electrical circuit is introduced into this field, the oscillator is attenuated. The downstream circuitry, consisting of a flip-flop and an amplifier, evaluates the behavior of the oscillator and actuates the output. Inductive proximity sensors can be used for the detection of all good electrical conductors (materials). In addition to metals, these include, for example, graphite.
5.6 Inductive proximity sensors
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 87
Hydraulics & Pneumatic Systems
5.3.3 Capacitive proximity sensors A capacitive proximity sensor consists of a capacitor and an electrical resistance that together forms an RC oscillator, and a circuit for evaluation of the frequency. An electrostatic field is generated between the anode and the cathode of the capacitor. A stray field forms at the front of the sensor. If an object is introduced into this stray field, the capacitance of the capacitor changes. The oscillator is attenuated. The circuitry switches the output. Capacitive proximity sensors not only react to highly conductive materials (such as metals) but also to insulators of high dielectric strength (such as plastics, glass, ceramics, fluids and wood).
5.7 Capacitive proximity sensor
5.3.4 Optical proximity sensor Optical proximity sensors use optical and electronic means for object detection. Red or infrared light is used. Semiconductor light-emitting diodes (LEOs) are particularly reliable sources of red or infrared light. They are small and rugged, have a long service life and can be simply modulated. Photodiodes or phototransistors are used as a receiver. Red light has the advantage that the light beam can
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 88
Hydraulics & Pneumatic Systems
be seen during adjustment of the optical axes of the proximity switch. Polymer optical fibres can also be used because of their low attenuation of light of this wavelength. Three different types of optical proximity switch are differentiated: One-way light barrier Reflective light barrier Diffuse reflective optical sensor 5.3.4.1 One-way light barrier The one-way light barrier has spatially separate transmitter and receiver units. The parts are mounted in such a way that the transmitter beam is directed at the receiver. The output is switched if the beam is interrupted.
5.8 One-way light barrier
5.3.4.2 Reflective light barrier In the reflective light barrier, the transmitter and receiver are mounted together in one housing. The reflector is mounted in such a way that the light beam transmitted by the transmitter is practically completely reflected to the receiver. The output is switched if the beam is interrupted
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 89
Hydraulics & Pneumatic Systems
5.9 Reflective light barrier 5.3.4.2 Diffuse reflective optical sensor In the diffuse reflective optical sensor, the transmitter and receiver are mounted together in one unit. If the light hits a reflective object, it is redirected to the receiver and causes the output of the sensor to switch. Because of the functional principle, the diffuse reflective optical sensor can only be used if the material or machine part to be detected is highly reflective (For example, polished metal surfaces, bright paint)
5.10 Diffusive reflective optical sensor
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 90
Hydraulics & Pneumatic Systems
5.3.5 Ultrasonic proximity sensors In the ultrasonic proximity sensor, the transmitter and receiver are mounted together in one unit like that in a diffuse reflective optical sensor. If the Ultrasonic wave hits a reflective object, it is redirected to the receiver and causes the output of the sensor to switch.
5.11 Ultra-sonic proximity sensors
5.3.6 Pneumatic proximity sensors
Pneumatic proximity sensors make use of pneumatic air for sensing the objects that are within a range of the sensors. They are classified as: Reflex sensor Interruptible jet sensor 5.3.6.1 Reflex sensors The reflex sensor uses an annular nozzle jet of air the action of which removes air from the centre bore to give a light vacuum at the signal output X. If an object is placed in front of the sensor, flow is restricted and a significant pressure rise is seen at X. 5.3.6.2 Interruptible jet sensors Interruptible jet sensor is simple in operation but uses more air. A typical application could be sensing the presence of a drill bit to indicate 'drill complete' in a pneumatically controlled machine tool. With no object present, the jet produces a pressure rise at signal output X. An object blocking this flow causes X to fall to atmospheric pressure.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 91
Hydraulics & Pneumatic Systems
5.12 Reflex sensors
5.13 Interruptible jet sensors With both types of sensor, air consumption can be a problem. To reduce air usage, low pressure and low flow rates are used. Both of these results in a low pressure signal at X which requires pressure amplification or low pressure pilot valves before it can be used to control full pressure lines.
5.4 Pressure sensors There are various types of pressure-sensitive sensors: Pressure switch with mechanical contact (binary output signal) Pressure switch with electronic switching ( binary output signal) Electronic pressure sensor with analogue output signal
In the mechanically actuated pressure switch, the pressure acts on a cylinder surface. If the pressure exerted exceeds the spring force of the return spring, the piston moves and operates the contact set.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 92
Hydraulics & Pneumatic Systems
5.14 Pressure sensor
5.5 Relays and contactors A relay is an electro-magnetically actuated switch. When a voltage is applied to the solenoid coil, an electro-magnet field results. This causes the armature to be attracted to the coil core. The armature actuates the relay contacts, either closing or opening them, depending on the design. A return spring returns the armature to its initial position when the current to the coil is interrupted.
5.15 Relay contactor
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 93
Hydraulics & Pneumatic Systems
A relay coil can switch one or more contacts. In addition to the type of relay described above, there are other types of electro-magnetically actuated switch, such as the retentive relay, the time relay, and the contactor.
5.5.1 Applications of relays In electro-pneumatic control systems, relays are used for the following functions: Signal multiplication Delaying and conversion of signals Association of information Isolation of control circuit from main circuit In purely electrical controllers, the relay is also used for isolation of DC and AC circuits.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 94
Hydraulics & Pneumatic Systems
Chapter 06
6. Hydraulics
6.1 Introduction Hydraulic Systems are used in industrial applications such as stamping presses, steel mills, and general manufacturing, agricultural machines, mining industry, aviation, space technology, deep-sea exploration, transportation, marine technology, and offshore gas and petroleum exploration. In short, very few people get through a day of their lives without somehow benefiting from the technology of hydraulics. The impressive and ongoing growth of this versatile and exciting technology continues to create numerous job opportunities for properly trained and accredited people in all areas of Fluid Power: engineers, technicians. Mechanics, sales and service personnel are badly needed, whilst there is also a shortage of trained teachers of Fluid Power subjects in post-secondary vocational and tertiary education.
6.1.1 The basic concept of a hydraulic system Hydraulics is the engineering science of liquid pressure and liquid flow. Hydraulic power transmission systems are concerned with the generation, modulation, and control of pressure and flow, and in general such systems include: Pumps which convert available power from the prime mover to hydraulic power at the actuator. Valves which control the direction of pump-flow, the level of power produced, and the amount of fluid-flow to the actuators. The power level is determined by controlling both the flow and pressure level. Actuators which convert hydraulic power to usable mechanical power output at the point required. The medium, which is a liquid, provides rigid transmission and control as well as lubrication of components, sealing in valves, and cooling of the system. Connectors which link the various system components provide power conductors for the fluid under pressure, and .fluid flow return to tank (reservoir). Fluid storage and conditioning equipment which ensure sufficient quality and quantity as well as cooling of the fluid.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 95
Hydraulics & Pneumatic Systems
6.1 Basic hydraulic system
6.2 Advantages and limitations 6.2.1 Advantages High force and power density Low installation space requirements Simple closed-loop controllability Excellent dynamic response, low mass moment of inertia Simple power storage, branching and limitation High ruggedness, even in exacting conditions
6.2.2 Limitations High initial costs Maintenance- and repair-friendliness Leakage problems
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 96
Hydraulics & Pneumatic Systems
6.3 Physical properties of oil hydraulics 6.3.1 Mass and force Pneumatic and hydraulic systems generally rely on pressure in a fluid. Before we can discuss definitions of pressure, though, we must first be clear what is meant by everyday terms such as weight, mass and force. We all are used to the idea of weight, which is a force arising from gravitational attraction between the mass of an object and the earth. A body weighs 75 kg on the surface of the earth; this is equivalent to saying there is 75 kg force between the base of the body and the ground.
Weight therefore depends on the force of gravity. On the moon, where gravity is about one sixth that on earth, the weight of the body would be about 12.5 kg; in free fall the weight would be zero. In all cases, though, the bodys mass is constant.
If a force is applied to a mass, acceleration (or deceleration) will result as given by the well known formula: F = ma (6.1)
Care must be taken with units when a force F is defined in lbs f or kg f and mass is defined in lbs or kg, because resulting accelerations are in units of g; acceleration due to gravity
The SI unit of force, the newton (N), is defined not from earth's gravity, but directly from expression 1.1. A newton is defined as the force which produces an acceleration of 1 ms-2 when applied to a mass of 1 kg.
One kgf produces an acceleration of 1 g (9.81 ms-2) when applied to a mass of 1 kg. One newton produces an acceleration of 1 ms-2 when applied to mass of 1 kg.
6.3.2 Pressure Pressure occurs in a fluid when it is subjected to a force. In Figure 1.4 a force F is applied to an enclosed fluid via a piston of area A. This results in a pressure P in the fluid. Obviously increasing the force increases the pressure in direct proportion. Less obviously, though, decreasing piston area also increases pressure. Pressure in the fluid can therefore be defined as the force acting per unit area, or:
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 97
Hydraulics & Pneumatic Systems
P = F/ A (6.2)
6.3.3 Work, energy and power Work is done (or energy is transferred) when an object is moved against a force, and is defined as: Work = force x distance moved. (6.3)
In the Imperial fps system expression 1.5 gives a unit of ft lb f. For metric systems the unit is cm kg f. The SI unit of work is the joule,
Power is the rate at which work is performed: Power = Work / time (6.4)
The SI unit of power is the watt, defined as 1 Js-1. This is by far the most common unit of power, as it is almost universally used for the measurement of electrical power.
6.3.4 Torque The term torque is used to define a rotary force, and is simply the product of the force and the effective radius. We thus have: T=Fxd In the Imperial system the unit is lbf ft, in metric systems the unit is kgf m or kgf cm, and in SI the unit is N m. (6.5)
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 98
Hydraulics & Pneumatic Systems
6.3.5 Pascal's law Pressure in an enclosed fluid can be considered uniform throughout a practical system. There may be small differences arising from head pressures at different heights, but these will generally be negligible compared with the system operating pressure. This equality of pressure is known as Pascal's law, and is illustrated in Figure 6.2 where a force of 5 kgf is applied to a piston of area 2 cm 2. This produces a pressure of 2.5 kgf cm -2 at every point within the fluid, which acts with equal force per unit area on the walls of the system.
6.2 Pascals law Suppose the base of the left hand tank is 0.1 x 0.1 m to give a total area of 100cm 2. The total force acting on the base will be 250 kgf. If the top of the fight hand tank is 1 m x 1.5 m, a
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 99
Hydraulics & Pneumatic Systems
surprisingly large upwards force of 37,500 kgf is developed. Note, the size of the connecting pipe has no effect. 6.4 Hydraulic power pack The hydraulic fluid reservoir, when correctly designed and constructed, has a considerable effect on the function and economical performance of the hydraulic system. The reservoir (also called tank) serves a number of important functions: It stores the fluid as it returns from the hydraulic system, and acts as a buffer for fluid fluctuations resulting from unequal flow displacement in the actuators. It dissipates fluid heat generated by power losses in the actuators and the control valves. It allows un-dispersed air (foam or bubbles) to separate out of the hydraulic fluid. It permits fluid contaminants to sink, and settle on the bottom of the reservoir out of the fluid.
6.4.1 Reservoir construction To perform these functions, certain design features are common to most reservoirs for industrial (stationary) applications. The reservoir is constructed of welded steel plate, with legs to raise the tank above ground level. This permits cooling by air circulation around all the walls and the bottom of the tank, to give optimum heat transfer. For stationary applications, the reservoir is usually also designed to serve as a mounting platform for the pump, the motor, and related pressure and directional control valves. This demands that the reservoir construction be quite rigid and strong with a flat top. The bottom of this reservoir is sloped or dished to dram to drain to the drain plug. Large cleanout plates or lids are fitted on the side of the tank to permit access for cleaning and maintenance. Some smaller reservoirs are made of aluminium castings with cooling fins. Such reservoirs are marketed as complete power units including the prime mover, the pump and a system relief valve. Most modern small power units (up to 150 L) have the pump mounted vertically on the end of bell housing, immersed in the hydraulic fluid. A coupling permits the removal of the electric motor without having to disturb the pump. Also mounted on the top plate for easy access and cleaning is the return line filter.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 100
Hydraulics & Pneumatic Systems
6.3 Resorvoir 6.4.2 Purposes served by a reservoir 6.4.2.1 Elimination of contaminants Even with adequate filtration, dirt particles such as fibers, abrasions, oxide scale, plastic elastomers, airborne dirt, and silica sand can accumulate in the system. The particles which are not filtered out should be allowed to settle on the reservoir bottom. A baffle plate, which is a metal divider extending lengthwise through the middle of the reservoir is used to circulate the fluid returning from the system, and to separate the pump suction line from the return line. The slow motion of the circulating fluid allows the heavier dirt particles to settle out.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 101
Hydraulics & Pneumatic Systems
6.4.2.2 Elimination of air Air bubbles, sometimes created by entrained air or by the intermittent flow of low pressure return lines and drains, will have a chance to work their way to the fluid surface in the reservoir. This process is further stimulated by an air diffuser (a perforated plate or a sieve, and by the fluid circulation caused by the baffle.
6.4.2.3 Breather-filler The fluctuating fluid volume in the reservoir (caused by variations in the flow demand and flow return by the actuators) produces a constant airflow in and out of the reservoir. This airflow passes through a specially designed breather-filler, which is built for a threefold purpose. It filters the air flowing into the reservoir, it is used as a strainer when the reservoir is replenished, and it provides a passage for constant air exchange to and from the reservoir. It is important to use a breather large enough to cope with the airflow caused by the fluid fluctuations, as the air volume in the reservoir must always be at atmospheric pressure to prime the pump.
In order to ensure that the reservoir is filled only with absolutely clean fluid, an increasing number of systems are fitted with a separate filling point in the fluid return line, and the breather is sealed. Thus, fluid is pumped (by hand or power pump) through the return line filter into the reservoir. A check valve above the filter prevents fluid from going up the return line.
6.4.2.4 Elimination of fluid heat Power losses in the hydraulic system are converted into heat. The bulk of this heat is absorbed by the hydraulic fluid, the control elements, the actuators, and the reservoir. The heat level in the system will therefore increase, until heat creation and heat dissipation (or heat transfer) are in balance The temperature at this point is called the inertia temperature, To operate the hydraulic system without separate cooling, this inertia temperature must be equal, or preferably less, than the maximum tolerable system temperature. The amount of heat that can be dissipated by the reservoir depends directly on: The size of the outside surface of the tank through which heat transfer can take place. The amount of hydraulic fluid in the reservoir and therefore its flow rate through the tank. The difference between hydraulic fluid temperature and the ambient air temperature around the reservoir. The air circulation around the hot reservoir.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 102
Hydraulics & Pneumatic Systems
6.5 Hydraulic fluids 6.5.1 Purposes of the Fluid The hydraulic fluid has four primary purposes: to transmit power, to lubricate moving parts, to seal clearances between parts, and to cool or dissipate heat.
6.5.1.1 Power Transmission As a power transmitting medium, a fluid must flow easily through lines and component passages. The fluid also must be as incompressible as possible.
6.5.1.2 Lubrication In most hydraulic components, internal lubrication is provided by the fluid. Pump elements and other wearing parts slide against each other on a film of fluid. For long component life the oil must contain the necessary additives to ensure high anti wear characteristics. Not all hydraulic oils contain these additives.
6.5.1.3 Sealing In many instances, the fluid is the only seal against pressure inside a hydraulic component. There is no seal ring between the valve spool and body to minimize leakage from the highpressure passage to the low-pressure passages. The close mechanical fit and oil viscosity determines leakage rate.
6.5.1.4 Cooling Circulation of the oil through lines and round the walls of the reservoir gives up heat that is generated in the system.
6.5.2 Quality Requirements In addition to these primary functions, the hydraulic fluid may have a number of other quality requirements. Some of these are: Prevent rust Prevent formation of sludge, gum and varnish Depress foaming Maintain its own stability and thereby reduce fluid replacement cost Maintain relatively stable body over a wide temperature range
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 103
Hydraulics & Pneumatic Systems
Prevent corrosion and pitting Separate out water Compatibility with seals and gaskets These quality requirements often are the result of special compounding and may not be present in every fluid.
6.5.3 Fluid Properties Let us now consider the properties of hydraulic fluids which enable it to carry out its primary functions and fulfill some or all of its quality requirements.
6.5.3.1 Viscosity Viscosity is the measure of the fluid's resistance to flow; or an inverse measure of fluidity. If a fluid flows easily, its viscosity is low. You also can say that the fluid is thin or has a low body. A fluid that flows with difficulty has a high viscosity. It is thick or high in body.
Viscosity a Compromise: For any hydraulic machine, the actual fluid viscosity must be a compromise. A high viscosity is desirable for maintaining sealing between mating surfaces. However, too high a viscosity increases friction, resulting in: High resistance to flow Increased power consumption due to frictional loss High temperature caused by friction Increased pressure drop because of the resistance Possibility of sluggish or slow operation Difficulty in separating air from oil in reservoir and should the viscosity be too low. Internal leakage increases Excessive wear or even seizure under heavy load may occur due to breakdown of the oil film between moving parts. Pump efficiency may decrease, causing slower operation of the actuator. Increased temperatures result from leakage losses.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 104
Hydraulics & Pneumatic Systems
6.5.3.2 SUS Viscosity For most practical purposes, it will serve to know the relative viscosity of the fluid. Relative viscosity is determined by timing the flow of a given quantity of the fluid through a standard orifice at a given temperature. There are several methods in use. The most accepted method in this country is the Saybolt Viscometer
6.5.3.3 Pour Point Pour point is the lowest temperature at which a fluid will flow. It is a very important specification if the hydraulic system will be exposed to extremely low temperature. For a thumb rule, the pour point should be 20 degrees F below the lowest temperature to be encountered.
6.5.3.4 Lubricating Ability It is desirable for hydraulic system moving parts to have enough clearance to run together on a substantial film of fluid. This condition is called full-film lubrication. So long as the fluid has adequate viscosity the minute imperfections in the surfaces of the parts do not touch.
However in certain high performance equipment, increased speeds and pressure, coupled with lower clearances, because the film of fluid to be squeezed very thin and a condition called boundary lubrication occurs. Here, there may be metal-to-metal contact between the tips of the two mating part surfaces and some chemical lubricating ability is needed.
6.5.3.5 Oxidation Resistance Oxidation or chemical union with oxygen is a serious reducer of the service life of a fluid. Petroleum oils are particularly susceptible with oxidation, since oxygen readily combines with both carbon and hydrogen in the oils makeup.
Most of the oxidation products are soluble in the oil, and additional reactions take place in the products to form gum, sludge and varnish. The first stage products which stay in the oil are acid in nature and can cause corrosion throughout the system, in addition to increasing the viscosity of the oil. The insoluble gums, sludge and varnish plug orifices, increase wear and cause valves to stick.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 105
Hydraulics & Pneumatic Systems
6.5.3.6 Catalysts There are always a number of oxidation catalysts or helpers in a hydraulic system. Heat, pressure contaminants water, metal surfaces and agitation all accelerate oxidation once it starts. Temperature is particularly important. Tests have shown that below 135 F, oil oxidizes very slowly. But the rate of oxidation (or any other chemical reaction) approximately doubles for every 18 F increase in temperature.
Oil refiners incorporate additives in hydraulic oils to resist oxidation, since many systems operate at considerably higher temperature. Their additives are either: Stop oxidation from continuing immediately after it starts (chain breaker type) Reduce the effect of oxidation catalysts (metal deactivator type).
6.5.3.7 Rust and Corrosion Prevention Rust is the chemical union of iron (or steel) with oxygen. Corrosion is a chemical reaction between a metal and a chemical usually an acid. Acids result from the chemical union of water with certain elements.
Since it is usually not possible to keep air and atmosphere-borne moisture out of the hydraulic system there will always be opportunities for rust and corrosion to occur. During corrosion, particles of metal are dissolved and washed away. Both rust and corrosion contaminate the system and promote wear. They also allow excessive leakage past the affected parts and may cause components to seize.
Rust and corrosion can be inhibited by incorporating additives that plate on the metal surfaces to prevent their being attacked chemically.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 106
Hydraulics & Pneumatic Systems
6.5.3.8 Demulsibility Small quantities of water can be tolerated in most systems. In fact, some anti-rust compounds promote a degree of emulsification or mixture with any water that gets into the system. This prevents the water from settling and breaking through the anti-rust film. However, very much water in the oil will promote the collection of contaminants and can cause sticky valves and accelerated wear. With proper refining hydraulic oil can have a high degree of demulsibility or ability to separate out water.
6.5.3.9 Additives Since most of the desirable properties of a fluid are atleast partly traceable to additives, commercial additives can be incorporated in any oil to make it more suitable for hydraulic system.
6.6 Filters Filtration of the hydraulic fluid is of the greatest importance for maintaining the function and reliability of the hydraulic system. Fluid contamination occurs through a variety of sources: Contaminants left in the system during original assembly or subsequent maintenance work like welding scale and welding beads, silicone tape shreds, bits of pipe threads and seal materials tubing burrs and grinding chips. Contaminants generated when running the system may include wear particles, sludge and varnish due to fluid oxidation, and rust and water due to condensation on the reservoir's interior. Contaminants introduced into the system from outside. These include using the wrong fluid when topping up, and dirt particles introduced by contaminated tools or repaired components. The large quantities of highly pressurized fluid carry these contaminants endlessly through the system or deposit them in the small clearances of pumps, valves, actuators, and motors. Thus, if they are not filtered out, the systems will soon either ceases to function altogether, or the lapping action of the metal particles may pre-maturely wear pumps, motors, and valves, causing high internal leakage and power losses.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 107
Hydraulics & Pneumatic Systems
6.6.1 Filter types and materials In "depth type" filters the hydraulic fluid is forced through multiple layers of material. The contaminants are retained and embedded in the filter material because of the tortuous path the fluid must take. These filters are also called absorbent filters. Filter material used for depth type filters are: Porous and permeable paper (treated and resin coated). Synthetic fibers in long strands matted and pressed. Metal fibers woven, or matted and pressed. Glass fibers woven, or matted and pressed. Sintered granular metals (cartridge and disc-type elements).
6.4 Depth filter
In "surface type" filters the hydraulic fluid flows straight through a layer of woven mesh, and deposits the dirt particles on the surface of the mesh. To increase the filter surface, the mesh is often star shape folded. Filter materials used for surface type filters are: Steel wire cloth (woven) Nylon monofilament cloth (woven) Cellulose fiber cloth (woven) Series of metal discs separated by thin spacers
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 108
Hydraulics & Pneumatic Systems
6.5 Surface filter Paper filters cannot be cleaned, and must be discarded when filled with contaminants. Metal, glass, and synthetic fibre filters can be dismantled and cleaned. Some filters may have a provision for an electrical or mechanical indicator which signals dirt saturation. As a rule a filter should never be used without an indicator, and pressure line and return line filters should always have a by-pass.
Return Iine filters are low pressure elements which filter the returning fluid prior to its entry into the reservoir. Return line filters are inexpensive, cause few problems during usage and maintenance, and filter the entire fluid volume. However; they have the disadvantage that only the returning fluid, and not the fluid entering into the system is cleaned. Thus, contaminants can enter the pump the valves, and the actuators.
Pressure line filters Pressure line filters must withstand maximum system pressure and are therefore strong and expensive. Pressure line filters are used upstream of motors and valves to protect them from dirt particles. They are usually mounted directly into the component they must protect. Provided a high-strength element is used, these filters can be used without a bypass in order to shut down the system if clogged. They are used in this way to protect expensive servo valves against particle damage.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 109
Hydraulics & Pneumatic Systems
6.6 Filter schematic
6.6.2 Filter arrangement in Hydraulic System
6.7 Filter arrangement
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 110
Hydraulics & Pneumatic Systems
6.8 Hydraulic pumps A hydraulic pump takes oil from a tank and delivers it to the rest of the hydraulic circuit. In doing so it raises oil pressure to the required level. The operation of such a pump is illustrated below. On hydraulic circuit diagrams a pump is represented by the symbol of Figure 6.7, with the arrowhead showing the direction of flow.
Hydraulic pumps are generally driven at constant speed by a three phase AC induction motor rotating at 1500 rpm in the UK (with a 50 Hz supply) and at 1200 or 1800 rpm in the USA (with a 60 Hz supply). Often pump and motor are supplied as one combined unit. As an AC motor requires some form of starter, the complete arrangement is shown below.
6.7 Hydraulic circuit diagrams
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 111
Hydraulics & Pneumatic Systems
6.8.1 Types of hydraulic pump
6.8.1.1 Gear pumps The simplest and most robust positive displacement pump, having just two moving parts, is the gear pump. Its parts are non-reciprocating, move at constant speed and experience a uniform force. Internal construction, shown in Figure 6.8, consists of just two close meshing gear wheels which rotate as shown. The direction of rotation of the gears should be carefully noted; it is the opposite of that intuitively expected by most people. As the teeth come out of mesh at the centre, a partial vacuum is formed which draws fluid into the inlet chamber. Fluid is trapped between the outer teeth and the pump housing, causing a continual transfer of fluid from inlet chamber to outlet chamber where it is discharged to the system.
6.8 Gear pump
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 112
Hydraulics & Pneumatic Systems
6.8.1.2 Lobe pumps There are some variations of the basic gear pump. In Figure 6.9, gears have been replaced by lobes giving a pump called, a lobe pump.
6.9 Lobe pump 6.8.1.3 Vane pumps The major source of leakage in a gear pump arises from the small gaps between teeth, and also between teeth and pump housing. The vane pump reduces this leakage by using spring (or hydraulic) loaded vanes slotted into a driven rotor, as illustrated in the two examples of Figure 6.10.
In the pump shown in Figure 6.10a, the rotor is offset within the housing, and the vanes constrained by a cam ring as they cross inlet and outlet ports. Because the vane tips are held against the housing there is little leakage and the vanes compensate to a large degree for wear
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 113
Hydraulics & Pneumatic Systems
at vane tips or in the housing itself. There is still, however, leakage between rotors faces and body sides. Pump capacity is determined by vane throw, vane cross sectional area and speed of rotation. The difference in pressure between outlet and inlet ports creates a severe load on the vanes and a large side load on the rotor shaft which can lead to bearing failure. The pump in Figure 6.10a is consequently known as an unbalanced vane pump. Figure 6.10b shows a balanced vane pump. This features an elliptical cam ring together with two inlet and two outlet ports. Pressure loading still occurs in the vanes but the two identical pump halves create equal but opposite forces on the rotor, leading to zero net force in the shaft and bearings. Balanced vane pumps have much improved service lives over simpler unbalanced vane pumps.
6.10 Vane pumps
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 114
Hydraulics & Pneumatic Systems
6.8.1.4 Piston pumps A piston pump is superficially similar to a motor car engine, and a simple single cylinder arrangement was shown earlier in Figure 6.11. Such a simple pump, however, delivering a single pulse of fluid per revolution, generates unacceptably large pressure pulses into the system. Practical piston pumps therefore employ multiple cylinders and pistons to smooth out fluid delivery, and much ingenuity goes into designing multi-cylinder pumps which are surprisingly compact.
6.11 Piston pump
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 115
Hydraulics & Pneumatic Systems
7. Hydraulic actuators and accessories
7.1 Linear actuators
Chapter 07
Hydraulic linear actuators are used to convert hydraulic power into linear mechanical force or motion. Although the actuator itself produces linear motion, a variety of mechanical linkages and devices may be attached to it to produce a final output which is rotary, semi-rotary, or a combination of linear and rotary. Levers and linkages may also be attached to achieve force multiplication or force reduction, as well as an increase or reduction of motion speed as shown in the figure below.
7.1 Linear Actuators
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 116
Hydraulics & Pneumatic Systems
The main parts of a hydraulic linear actuator are shown in Figure 7.2. A variety of refinements, additions, and options can be added to this basic actuator. The generation of linear thrust force is very simple, the fluid under pressure, when delivered to one end of the actuator, acts against the piston area. The piston with the attached piston rod starts to move in linear direction as long as the reaction force is smaller. The developed force is used to move a load which may be attached either to the piston rod or to the actuator housing Figure 7.2. The distance through which the piston travels is known as the stroke.
7.2 Parts of a hydraulic linear actuator 7.1.1 Actuator types Single-acting actuators permit the application of hydraulic force in one direction only. These actuators are normally mounted in vertical direction, thus permitting the load to return the piston to its initial position. Where the actuator must be mounted horizontally, an inbuilt spring is used to cause retraction Figure 7.3.
Double-acting actuators permit the application of hydraulic force in both directions. However, the retraction stroke develops a smaller force than the extension stroke, since the pressurized fluid acts on a smaller area, known as the annulus area Figure 7.3. Double-ended actuators with rods on both actuator ends are used where the developed force must be equal for both directions (extension and retraction).
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 117
Hydraulics & Pneumatic Systems
Since the voids to be filled with hydraulic fluid are equal for extension and retraction, the resulting piston speeds are also equal for both strokes. (Piston speed equals actuator volume divided by the flow rate of the pump.)
Telescopic actuators may be double or single acting. Their collapsed length is only little more than their longest segment. The developed pressure varies with the load and the effective piston area. Thus, the piston segment with the largest piston area extends first. The required pressure increases with each extended segment, since the piston area decreases while the load remains constant. When retracting the sequence is reversed, i.e. the smallest piston retracts first.
7.3 Actuator types 7.1.2 End-position cushioning Cushioning, or end-position cushioning, refers to braking and deceleration of the final stroke portion until standstill occurs. Cushioning becomes essential above a certain stroke speed. The kinetic energy released on impact at the stroke end must be absorbed by the stroke limit-stops, which are built into the end caps. Their capacity to absorb this energy depends on the elasticity of their material. An hydraulic braking function (end-position cushioning) must therefore be applied where piston speeds (v) exceed 0.1 m/sec. Figure 7.4 shows a cross-section of the end-position cushioning mechanism of the end cap.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 118
Hydraulics & Pneumatic Systems
The cushioning of the rod end cap is similar. The piston is fitted with a tapered cushioning bush. When this bush enters into the bore of the end cap during the final part of the stroke the main fluid exit begins to shut until it finally closes off completely. This first stage of exit-flow throttling causes an initial speed deceleration. The remaining fluid must now exhaust through the cushioning valve. The degree of cushioning and second stage speed control can be regulated at the cushioning valve (flow control valve). A check valve is fitted to achieve fast and full force break-away from the end position. A bleed screw may also be built into the check valve Figure 7.4. Some manufacturers have separate bleed screws available as an option. The bleed screw must always be mounted uppermost.
7.4 Cushioning
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 119
Hydraulics & Pneumatic Systems
7.2 Rotary actuators Hydraulic motors convert hydraulic energy into torque and consequently into power. Motors very closely resemble hydraulic pumps in their construction. In-fact, many pumps can also be used as motors Instead of pushing fluid into the system as pumps do motors are being pushed by the fluid through which they develop torque and continuous rotary motion. They are also called as LSHT motors
Low-speed/high-torque (LSHT) motors are one of the more cost-effective and dependable parts of a hydraulic system. They offer a designer many advantages over a system comprised of a high-speed motor and a gearbox speed reducer. Foremost is the fact that LSHT motors transmit a large amount of power from a comparatively small drive envelope. Low noise and vibration and high energy efficiency can be additional benefits. Rapid reversal of direction may be achieved simply by reversing the direction of hydraulic fluid flow. LSHT motors also exhibit smooth starting torque. Maximum shaft speed for LSHT motors can range up to 1,000 rpm, and some motors operate smoothly at speeds as low as 0.1 rpm with suitable closed-loop electronic control. These motors generally exhibit good starting efficiencies and fairly constant torque over their entire speed range.
LSHT motors come in such a wide variety of designs that direct comparison of performance between two types is virtually impossible. Instead, here are some important points about four of the main LSHT motor styles:
7.2.1 Vane motors: These motors resemble traditional hydraulic vane motors, in which pressure (assisted by springs) pushes against a series of vanes. These vanes ride a ring cam and slide in and out of rotor slots. The vanes form sealed chambers, which carry fluid from an inlet to an outlet. LSHT vane motors run most efficiently at lower pressures and are radially balanced, which extends their operating life. Because of a fairly large number of leakage paths, they tend to have lower volumetric efficiency at slow speeds. Displacements of up to 650 in3/rev are available.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 120
Hydraulics & Pneumatic Systems
7.2.2 Piston motors: There are several different designs that fall under this category. Generally, radial-piston motors have a large displacement range. Leakage-resistant characteristics - and hence, good volumetric efficiency through the entire speed range characterize eccentric drum radial piston motors. This style of motor has a high starting torque and is very efficient in the medium- to high-displacement range. Motors known as cam-type radial-piston motors, Figure 7.5, are slightly less efficient because of their concentric configuration. On both of these types, the manufacturers speed recommendations must be followed closely. Low speed may bring about torque ripple or speed flutter. These motors use pistons in several cylinders to push down on an off-center throw of a crankshaft drum. At the same time, other cylinders allow oil to escape through their valves to the tank drain port. The cylinders work slightly out of phase so that no dead spots are created at top dead center.
7.2.3 Gear motors: Gear motors are very economical, but often have lower volumetric efficiencies due to higher leakage rates. These motors are best suited for low-pressure applications. External-gear motors consist of one gear connected to an output shaft, and a matched idling gear. Fluid entering the housing forces the gears to rotate, and exits through the opposite side of the motor.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 121
Hydraulics & Pneumatic Systems
7.5 Hydraulic actuators
7.3 Accumulators Hydraulic systems it is sometimes desirable to store hydraulic fluid under pressure for release during peak demand. Unlike gases, such liquids cannot be compressed sufficiently to result in self-propelling release. The hydraulic accumulator solves this problem by storing the noncompressible fluid under external pressure.
Various means are applied to pressurize and drive the fluid from the accumulator into the hydraulic system and finally to the actuators. Weight loaded accumulators make use of gravitation, spring loaded accumulators use the elasticity of steel springs and gas charged accumulators use the compressibility of nitrogen gas to exert a force onto the hydraulic fluid Figure 7.6
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 122
Hydraulics & Pneumatic Systems
Gas charged accumulators are more commonly used than spring or weight loaded accumulators, but the weight loaded accumulator has the advantage that the force exerted onto the fluid is always constant, no matter how full the fluid chamber is. Many current hydraulic systems are equipped with one or more accumulators. In hydraulic systems, the storage of hydraulic fluid under pressure serves a number of purposes. The more common of these are: Supplement pump delivery Maintain system pressure Emergency power source Shock absorption, noise elimination Absorption of thermal expansion
7.3.1 Gas charged accumulators Bladder type accumulators are pre-charged with dry nitrogen gas. The pre-charge pressure will cause the bladder (bag) to fill the inside of the steel shell completely, and close the pressure fluid valve. As soon as the rising pressure within the hydraulic system reaches the gas precharge pressure p1 of the bladder, the fluid valve will open and the rising system pressure starts to force fluid into the accumulator. Further increases in system pressure will cause the bladder to be further compressed and even more hydraulic fluid is being forced into the steel shell.
Remember, that the bladder is filled with gas which is compressible, while the hydraulic fluid is not compressible. As the gas is compressed, the gas pressure will increase, equaling the system pressure. Thus, flow of fluid into the accumulator takes place only when the system pressure exceeds the gas pressure. Conversely, flow of fluid out of the accumulator takes place only when the system pressure sinks below the gas pressure. When the system flow demand is low or static the accumulator will be charged or filled. When the system demand is high or dynamic, the accumulator will release stored fluid to help the pump meet system flow demand.
Other gas-charged accumulators use a piston or a diaphragm to separate the gas from the hydraulic fluid Figure 7.7.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 123
Hydraulics & Pneumatic Systems
7.6 Accumulator
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 124
Hydraulics & Pneumatic Systems
7.7 Gas charged accumulator
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 125
Hydraulics & Pneumatic Systems
8. Hydraulic valves
Chapter 08
One of the most important functions in any fluid power system is control. If control components are not properly selected, the entire system will fail to deliver the required output. Elements for the control of energy and other control in fluid power system are generally called Valves. It is important to know the primary function and operation of the various types of control components. This type of knowledge is not only required for a good functioning system, but it also leads to the discovery of innovative ways to improve a fluid power system for a given application.
The selection of these control components not only involves the type, but also the size, the actuating method and remote control capability. There are 3 basic types of valves. Directional control valves Pressure control valves Flow control valves.
Directional control valves are essentially used for distribution of energy in a fluid power system. They establish the path through which a fluid traverses a given circuit. For example they control the direction of motion of a hydraulic cylinder or motor. These valves are used to control the start, stop and change in direction of flow of pressurized fluid.
Pressure may gradually buildup due to decrease in fluid demand or due to sudden surge as valves opens or closes. Pressure control valves protect the system against such over pressure. Pressure relief valve, pressure reducing, sequence, unloading and counterbalance valve are different types of pressure control valves.
In addition, fluid flow rate must be controlled in various lines of a hydraulic circuit. For example, the control of actuator speeds depends on flow rates. This type of control is accomplished through the use of flow control valves.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 126
Hydraulics & Pneumatic Systems
8.1 Directional control valves As the name implies directional control valves are used to control the direction of flow in a hydraulic circuit. They are used to extend, retract, position or reciprocate hydraulic cylinder and other components for linear motion. Valves contains ports that are external openings for fluid to enter and leave via connecting pipelines, The number of ports on a directional control valve (DCV ) is usually identified by the term way. For example, a valve with four ports is named as four-way valve. Directional control valves can be classified in a number of ways: 1. According to type of construction: Poppet valves Spool valves 2. According to number of working ports: Two- way valves Three way valves Four- way valves. 3. According to number of switching positions: Two position Three - position 4. According to actuating mechanism: Manual actuation Mechanical actuation Solenoid ( Electrical ) actuation Hydraulic ( Pilot ) actuation Pneumatic actuation Indirect actuation The designation of the directional control valve refers to the number of working ports and the number of switching positions.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 127
Hydraulics & Pneumatic Systems
Thus a valve with 2 service ports and 2 switching positions is designated as 2 / 2 way valve.
A valve with 3 service ports and 2 positions is designated as 2 / 3 way valve.
A valve with 4 service ports and 2 positions is designated as 2 / 4 valve.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 128
Hydraulics & Pneumatic Systems
A valve with 4 Service ports and 3 switching positions is designated as 3 / 4 way valve. Figure below shows an example of open centered position.
Spool positions as well as their corresponding actuating elements are labeled with numbers 1, 2 as shown in figure below. A valve with 2 spool position is shown and also a valve with 3 spool positions. In directional control valves with 3 spool position, the central position is the neutral position (or mid position or zero or null position). The neutral position is the position in which the moving parts are assumed to be inactive, but affected by a force (e.g. spring) The ports are designated as follows: P = Pressure Port (Pump Port) T = Tank Port A, B = User Ports
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 129
Hydraulics & Pneumatic Systems
Observe that the graphical symbol shows only one tank port T even though the physical design may have two since it is only concerned with the function of a component and not its internal design. The tank port is the port of the valve that is piped back to the hydraulic oil tank. Therefore, each tank port provides the same function. The spool valve working ports are inlet from the pump, outlets to the cylinder, and exhaust to tank. 8.1.1 Poppet Valves: Directional poppet valves consists of a housing bore in which one or more suitably formed seating elements ( moveable ) in the form of balls, cones are situated. When the operating pressure increases the valve becomes more tightly seated in this design. The main advantages of poppet valves are: No Leakage as it provides absolute sealing. Long useful life, as there are no leakages of oil flows. May be used with even the highest pressures, as no hydraulic sticking (pressure dependent deformation) and leakages occurs in the valve. The disadvantages of these valves are: Large pressure losses due to short strokes Pressure collapse during switching phase due to negative overlap (connection of pump, actuator and tank at the same time).
8.1.1.1: 2 / 2 DCV (Poppet design)
8.1 2/2 Direction Control Valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 130
Hydraulics & Pneumatic Systems
Figure 8.1, shows a ball poppet type 2 / 2 DCV. It is essentially a check valve as it allows free flow of fluid only in one direction (P to A) as the valve is opened hydraulically and hence the pump Port P is connected to port A as shown in fig b. In the other direction the valve is closed by the ball poppet (note the fluid pressure from A pushes the ball to its seat) and hence the flow from the port A is blocked (fig a.). The symbol for this type of design is same as that of check valve.
8.1.2 Spool valves: The spool valve consists of a spool which is a cylindrical member that has large- diameter lands machined to slide in a very close- fitting bore of the valve body. The spool valves are sealed along the clearance between the moving spool and the housing. The degree of sealing depends on the size of the gap, the viscosity of the fluid and especially on the level of pressure. Especially at high pressures (up to 350 bar) leakage occurs to such a extent that it must be taken into account when determining the system efficiency. The amount of leakage is primarily dependent on the gap between spool and housing. Hence as the operating pressure increases the gap must be reduced or the length of overlap increased. The radial clearance is usually less than 20 . The grooves between the lands provide the flow passage between ports. 8.1.2.1 Two-way valve (2/ 2 DCV) The simplest type of directional control valve is a check valve which is a two way valve because it contains two ports. These valves are also called as on-off valves because they allow the fluid flow in only in one direction and the valve is normally closed. Two way valves is usually the spool or poppet design with the poppet design more common and are available as normally opened or normally closed valves. They are usually actuated by pilot (Hydraulic actuation) but manual, mechanical, solenoid actuated design are also available. Figure 8.2 above shows Spool type 2 / 2 DCV manually actuated. In Figure 8.2 a, the port P is blocked by the action of spring as the valve is un-actuated (absence of hand force). Hence the flow from port P to A is blocked. When actuated (Presence of hand force) the valve is opened, thereby connecting port P to A.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 131
Hydraulics & Pneumatic Systems
8.2 Two way valve 8.1.2.2 Three way valve (2/ 3 DCV) A directional control valve primary function is alternatively to pressurize and exhaust one working port is called three-way valve. Generally, these valves are used to operate single- acting cylinders. Three-way directional valves are available for manual, mechanical, pilot, solenoid actuation. These valves may be two-position, or three -position. Most commonly they have only two positions, but in some cases a neutral position may be needed. These valves are normally closed valves (i.e. the pump port is blocked when the valve is not operating). The three-way valve ports are inlet from the pump, working ports, and exhaust to tank. These ports are generally identified as follows:
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 132
Hydraulics & Pneumatic Systems
P= pressure (Pump) port; A or B = working port T = tank port. Figure 8.3 (a) and (b) shows the two positions of the three way valve actuated manually by a push button. Spool position 1: When the valve is actuated, the spool moves towards left. In this position flow from pump enters the valve port P and flows out through the port A as shown by the straight- through line and arrow (fig a). In this position, port T is blocked by the spool. Spool position 0: when the valve is un-actuated by the absence of hand force, the valve assumes this position by the action of spring in this position, port P is blocked by the spool. Flow from the actuator can go to the tank from A to T as shown by straight through line and arrow (Fig a).
8.3 a Position of a 3 way valve
8.3 b Symbol
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 133
Hydraulics & Pneumatic Systems
8.1.2.3 Four - way DCV: These valves are generally used to operate cylinders and fluid motors in both directions hydraulically. The four ways are Port P that is connected to pump, tank port T, and two working ports A and B connected to the actuator. The primary function of a four way valve is to alternately pressurize and exhaust two working ports A & B. These valves are available with a choice of actuation, manual, mechanical, solenoid, pilot & pneumatic. Four-way valve comes with two or three position. One should note that the graphical symbol of the valve shows only one tank port even though the physical design may have two as it is only concerned with the function.
8.1.2.3.1 Three positions, four way valve: This type of DCV consists of three switching position. Most three- position valves have a variety of possible flow path configurations, but has identical flow path configuration in the actuated position (position 1 and position 2) and different spring centered flow paths. When left end of the valve is actuated, the valve will assume 1 position. In this position the port P to connected to working port A and working port B is connected to T (in some design P is connected to B, and A to T when left end is actuated ). Similarly when the right end is actuated, the valve will assume 2 positions. In this position port P is connected to B and working port A to T. When the valve is un-actuated, the valve will assume its center position due to the balancing opposing spring forces. It should be noted that a threeposition valve is used whenever it is necessary to stop or hold a actuator at some intermediate position within its stroke range, or when multiple circuit or functions must be accomplished from one hydraulic power source.
Three- position, four- way DCV have different variety of center configurations. The common varieties are the open center, closed center, tandem center, floating center, & regenerative center with open, closed and tandem are the three basic types A variety of center configurations provides greater flexibility for circuit design. Open center 3 / 4 DCV: In open- center circuit, all ports are open to each other in the center position. When the valve is in open center position, the pump flow is directed to the tank at atmospheric pressure. At the same time the actuator can be moved freely by applying an external force. Open center valve help to prevent heat buildup and no work can be done by any part of the system, as long as the valve remains in the center position, since the fluid always follows the path of least resistance. This means that other auxiliary devices in the system using pressure energy cannot function. Figure 8.4 a,b,c.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 134
Hydraulics & Pneumatic Systems
shows the three positions of 3 / 4 DCV. Figure 8.4 a, shows the valve is mid position i.e. when the valve is de-actuated. In Figure 8.4 b, since the left end of the valve is actuated, the valve assumes 1 position. Here port P is connected to A and B is connected to T. In Figure 8.4 c, since the right end of the valve is actuated, the valve assumes 2 positions. Here port P is connected to B and A is connected to T.
8.4 Direction Control valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 135
Hydraulics & Pneumatic Systems
8.5: Open centered DCV Symbol
8.6: Direction Control valve Closed center DCV
8.7: Closed centered DCV Symbol Figure 8.7 shows a closed center 3- position, 4 Way DCV in its center position. The working of the valve is similar to open center DCV and in actuated position the port connection is identical. In closed center DCV all ports are closed to each other. Hence the actuator connected to ports A and B is hydraulically locked and cannot be moved by an external force In this position the pump flow must go over the relief valve when flow is not being used for any other parts of the circuit. This forces the pump to produce flow at the high pressure setting of the pressure relief valve. This not only waste pump design
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 136
Hydraulics & Pneumatic Systems
power but promotes wear and shortens pump life. Also the temperature of oil is raised due to heat buildup in the system. This promotes oil oxidation, viscosity drop, which further raises the wear of parts and increased leakage. With this type of center in DCV, when the valve actuates to switching position 1 or 2, two things may happen. If pressure port (P to working port A or B) opens first pressure in the system raises which is not desirable, and if tank port open first pressure drops. Closed center versions are used only when multiple circuit or functions must be accomplished in the system from one power source.
Tandem centered 3 /4 DCV: Figure 8.8 shows a tandem center 3-position, 4-way DCV. In the center configuration, the working ports A and B are blocked, and the pump port P is connected to tank port T. The tandem center also results in a locked actuator. However, it also unloads the pump at atmospheric pressure. The application of this design may be to hold a cylinder or fluid motor under load or to permit the pump flow to be connected to a series of valves for multiple circuitries.
8.8 Tandem centered DCV
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 137
Hydraulics & Pneumatic Systems
8.2 Pressure control valves Pressure control valves are used in hydraulic systems to control actuator force (force = pressure x area), and to determine and (pre) select pressure levels at which certain machine operations must occur. Pressure controls are in the main used to perform the following system functions: To limit maximum system pressure in a hydraulic circuit or sub-circuit, and thus provide overload protection. To provide re-direction of pump flow to tank, while system pressure must be maintained (system unloading). To provide re-direction of pump flow to tank while system pressure is not maintained (system offloading). To offer resistance to fluid flow at selectable pressure levels (counterbalance force). To provide an alternative flow path for the fluid at selected pressure levels (pressure sequencing). To reduce (or step down) pressure levels from the main circuit to a lower pressure in a sub-circuit. Pressure control valves are often difficult to identify, mainly because of the many descriptive names applied to them. The function of the valve in the circuit usually becomes the basis for its name. The valves used to accomplish the abovementioned system functions are therefore given the following names, respectively: Relief valves (direct-acting or compound). Unloading relief valve (accumulator, charging valve). Offloading valve. Counterbalance valve and brake valve. Pressure-sequence valves. Pressure-reducing valves. 8.2.1 Direct-acting relief valve The load which has to be moved by the hydraulic actuator creates a certain resistance to the fluid flow from the hydraulic pump; as this resistance increases, the system pressure increases proportionally. If the actuator reaches a stalling point. Then the system pressure will rise almost instantly to such a hazardous level, that damage to the hydraulic system is inevitable.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 138
Hydraulics & Pneumatic Systems
For this very reason, most hydraulic systems are protected by a pressure-relief valve, which limits the maximum permissible system pressure, and diverts some or all of the pump's flow to tank when the pressure setting of the relief valve is reached.
Valve operation A direct-acting relief valve as shown in Figure 8.9 may consist of a ball or poppet held firmly onto the valve seat by the spring. The system pressure acts against the pressure-exposed area of the poppet. When the force of the fluid becomes greater (pressure x valve-seat area) than the opposing force of the spring, the poppet is forced off its seat; the relief valve opens, and fluid is released to tank at low pressure. The pressure at which the valve starts to divert flow to tank is called "cracking pressure". As flow to tank increases, the poppet is forced off its seat even more, causing a further compression of the spring. Thus, when the valve diverts all the pump-flow, the measured system pressure - which is called "full flow pressure" - may be considerably higher than the "cracking pressure". The difference between "full flow pressure" and the "cracking pressure" is called "pressure override".
8.9 Relief valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 139
Hydraulics & Pneumatic Systems
8.2.2 Compound-relief valve (pilot operated relief valve) The "pressure override" caused by the direct-acting relief valve may in some applications be acceptable However, in others it can result in considerable input power losses due to fluid lost through the valve during the wide "pressure override" band Figure 8.10. Due to the inertia of the valve poppet and the spring, sudden pressure increases on the valve inlet side give rise to pressure peaks beyond the adjusted "full flow pressure" and may well exceed the maximum permissible pressure rating of other components within the circuit. The compound-relief valve minimizes the "pressure override" to approximately 100-150 kPa and eliminates pressure peaks almost completely. Valve operation The relief valve setting pressure is adjusted with adjustment screw 9. As long as the pressure in the hydraulic system remains below the setting of the relief valve, the static pressure in chambers 2, 4, and 6 remains equal (Pascal's Law). When the system pressure increases sufficiently to force pilot poppet 7 off its seat ("cracking pressure"), fluid starts to flow to tank via internal drain 12 at a very low pressure. The resulting pressure imbalance, due to the pressure drop (p) across orifice 3, forces valve piston 11 upwards. This action compresses piston spring 10 and opens tank port T. thus preventing a further rise in pressure. Increased flow through the valve causes the piston to lift further off its seat, but as this only compress a very light spring very little "pressure override" is encountered. As soon as the system pressure sinks below the opening pressure of the relief valve poppet 7, the flow past the pilot relief valve and the orifice 3 stops, and the pressure differential (p) disappears. Thus, spring 10 re-seats piston 11 and relief flow from P to T stops Figure 8.10
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 140
Hydraulics & Pneumatic Systems
8.10 Compound relief valve 8.2.3 Venting the compound-relief valve The compound-relief valve requires pressure build-up during the relief function to keep the pilot relief-valve spring compressed; thus, work is performed by the pump. If the relief valve is required to release flow over a prolonged period, the work performed during that time may lead to considerable pump input power wastage and - worst of all- heat build-up in the hydraulic fluid, which eventually leads to fluid deterioration. The vented compound-relief valve renders the ideal solution to these problems. Valve operation Venting-port plug 5 is removed and port V is connected to the venting valve Figure8.11. The fluid under pressure can, after the venting valve is opened, flow to tank. This flow creates the required pressure drop across orifice 3, which unbalances piston 11 and opens the flow path for the pump flow to be diverted to tank.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 141
Hydraulics & Pneumatic Systems
Since the pressure developed during "venting" is only the pressure drop across orifice 3 (approximately 150-500 kPa), the power used during this time is minimal and the heat build-up negligible. The venting function is used to offload the pump during non-action stages of the circuit sequence. The venting valve can be controlled either by an electric or a pneumatic signal, and is with some manufacturers' brands mounted directly onto the compound relief valve to reduce unnecessary plumbing and minimize installation cost.
8.11 Venting the compound-relief valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 142
Hydraulics & Pneumatic Systems
8.2.4 Unloading valve (accumulator charging valve) The unloading valve (also called accumulator charging valve or differential unloading valve) IS in its design closely related to the compound-relief valve. This valve is used to accomplish the following switching and pressure control functions: Limit maximum system pressure Charge the accumulator to maximum system pressure and maintain a working volume and pressure in the accumulator Unload the pump when the desired accumulator pressure is reached (e.g. maintain system pressure to actuators).
Valve operation Figure 8.12 depicts the flow condition when the accumulator is being charged and the pump flow is directed into the system. As soon as the adjusted maximum system pressure in the accumulator and in the actuators is reached, the pilot relief valve poppet and the main valve piston open, and pump flow is diverted to tank at very low pressure. (For a detailed explanation of valve operation, see the compound-relief valve.) Due to the much higher pressure in the accumulator circuit the check valve closes, and the charged accumulator maintains pressure to the actuators. While the valve is unloading the pump flow the pressure in front of the pilot poppet is practically zero. The pilot valve and the main valve piston would therefore immediately re-seat, but for the system pressure from the accumulator, which is now acting via the check valve by pass onto the differential piston Figure 8.12. This pressurized piston forces the pilot poppet completely off its seat and holds it open until the accumulator pressure diminishes to approximately 85% of the maximum system pressure (accumulator charging pressure) as adjusted on the unloading valve. The accumulator pressure diminishes due to volume losses caused by system leakage actuator movements, or internal leakage of valve spools and seals. The left-hand side of the differential plunger has approximately 15% more circular area than the pressure-exposed area of the pilot poppet (see the diameter indication in the magnified section of Figure 8.12. Thus, if the system pressure drops below 85% of the initial maximum system pressure, the pilot poppet will re-seat and the main valve piston interrupts pump flow from port P to port T The
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 143
Hydraulics & Pneumatic Systems
pump flow now being redirected to port A opens the check valve and streams back into the system and into the accumulator Thus, the charging cycle is repeated. Although system pressure to the actuators is maintained while pump flow IS re-circulated to tank (with minimum power wastage) the fluctuating system pressure (between 100% and 85% approximately) may prove disadvantageous in certain industrial applications Thus other forms of system unloading may have to be selected. Unloading valves may also be used in so-called high-low circuits to cut-in and cut-out the low pressure pump.
8.12 Unloading valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 144
Hydraulics & Pneumatic Systems
8.2.5 Offloading valve The offloading valve is generally used in conjunction with double pump circuits Figure 8.13. The flow from the two pumps is combined to gain more speed while the actuator is traversing. When the high speed is no longer required, or when system pressure rises to the point where the combined pump flow would exceed the input power of the prime mover, the pump with the larger flow is offloaded to tank. Low pressure operation The offloading valve is closed under this condition. Flow from the large volume pump passes over the check valve and joins the flow from the low volume pump (the left-hand pump). This condition continues as long as the pressure within the system is below the pressure setting of the offloading valve. High pressure operation Figure 8.13 shows the offloading valve in the open condition, with the large-volume pump recirculating its flow to tank. The check valve is closed, thus the flow from the low volume pump is prevented from also being offloaded to tank. In this configuration, much less power is used than if both pumps had to be driven at high pressure (power= pressure x flow rate). When the motion of the actuator stops, the high-pressure low volume pump discharges its flow over the system relief valve. Valve operation The offloading valve is a direct-acting, remotely controlled pool valve where the spool is held in the closed position by the adjustable spring. When pilot pressure at port X exceeds the pressure setting, the spool is raised and flow from the primary to the secondary port occurs Figure 8.13. The hollow spool permits internal leakage (past the spool lands) to drain into the spring chamber, and subsequently to the secondary outlet, and thus to tank.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 145
Hydraulics & Pneumatic Systems
8.13 Offloading valve 8.2.6 Counterbalance valve (back pressure valve) The counterbalance valve is applied to create a back pressure or cushioning pressure on the underside of a vertically-moving piston, to prevent the suspended load from "free falling" because of gravity whilst it is being lowered Figure 8.14. This counteracting or counterbalancing function has given the valve its name.
Valve operation (lowering) The pressure setting on the counterbalance valve is slightly higher than the pressure required supporting the load from free falling. Due to this back pressure in line A, the actuator piston must be forced down when the load is being lowered. This causes the pressure in line A to increase, which raises the spring-opposed spool, thus providing a flow path to discharge the exhaust flow from line A to the directional-control valve and then to tank. The spring-controlled discharge orifice maintains back pressure in line A during the entire downward piston stroke (Figure 8.14 shows the load being lowered).
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 146
Hydraulics & Pneumatic Systems
Valve operation (lifting) Since the valve is normally closed, flow in the reverse direction (from port B to port A) could not occur without a reverse free-flow check valve. When the load is raised again, the internal check valve opens to permit flow for the retraction of the actuator. Valve operation (suspension) While the load is held in suspension the valve remains closed. Therefore, its pressure setting must be slightly higher than the pressure caused by the load. Spool valves tend to leak internally under pressure. This makes it advisable to use a pilot-operated check valve in addition to the counterbalance valve, if a load must be held in suspension for a prolonged time Figure 8.14.
8.14 Counter-balance valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 147
Hydraulics & Pneumatic Systems
8.2.7 Sequence valve (single stage) The sequence valve is closely related to the relief valve in its design and function. It permits hydraulic fluid to flow into a sub-circuit, when the pressure in the main circuit has reached the setting of the sequence valve. A typical application would be a clamp and spot-weld circuit Figure 8.15. The clamp actuator must be extended first, and as soon as the work-piece is clamped, the spot-weld head actuator must extend. Both actuators are permitted to retract simultaneously. An optional reverse flow check valve is normally incorporated when the valve is required to operate between a directional control valve and an actuator.
Valve operation The single-stage, spool-operated sequence valve is a normally closed valve. When pilot pressure at point X exceeds the pressure setting, the spool is raised against the spring, and fluid flows from primary port P to secondary port A. The valve requires an external drain, to permit internal fluid leakage past the spool land to drain back to tank Figure 8.15. It must be noted that sequence valves require a reverse flow check valve if return flow is required. Singlestage relief valves may also be remote controlled and all sequence valves are external, drained because the secondary line leads to a pressurized sub-circuit.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 148
Hydraulics & Pneumatic Systems
8.15 Sequence valve
8.2.8 Pressure reducing valve (pilot-operated) In some fluid power systems it IS desirable (and often necessary) to operate a sub-circuit at a lower pressure than the main system. Pressure reducing valves are used for this purpose. In contrast to the "normally closed' pressure control valves discussed so far, the pressure reducing valve is normally open". The main function of this valve is to limit and maintain a constant downstream pressure (subcircuit pressure), regardless of pressure fluctuations in the main circuit upstream Figure 8.16. Valve operation The required downstream pressure (sub-circuit pressure) is adjusted and set on the pilot relief valve. Below the valve operating pressure, the valve spool is held wide open by the light spring and fluid passes from port P to port A with virtually no restriction. Static pressure equal to the
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 149
Hydraulics & Pneumatic Systems
pressure in the sub-circuit exists below the valve spool inside the valve spool and in front of the pilot relief valve. When the sub-circuit pressure increases and reaches the level of the valve setting, the pilot valve will open and relieve flow to tank. This causes a pressure drop across the internal orifice (p) inside the valve spool, so that the higher pressure below the orifice forces the spool upwards against the spring. The spool will therefore remain balanced between the higher pressures below the orifice acting upwards and the lower pressure above the orifice, plus the light spring acting downwards. In this way the spool reduces or opens the flow passage from port P to port A and limits and maintains a constant pressure in the sub-circuit. When no flow is required in the sub-circuit, the valve will stay partially open and a fluid flow of some 0.6 -1.2 l/min will continuously flow past the pilot valve to tank. Reverse free flow through the valve is only possible if the pressure in the sub-circuit is below the valve pressure setting. If the pressure exceeds the valve setting, the valve will close thus making reverse flow impossible. Therefore pressure reducing valves are often equipped with a check valve for reverse free flow. External forces acting onto a linear actuator will increase the pressure between the pressure reducing valve and the actuator. In some systems it is therefore desirable to relieve excess fluid from the secondary system to tank In order to maintain a constant downstream pressure, regardless of such external forces. The pressure reducing valve depicted in Figure 8.16 fulfils this function but only for a limited flow rate (0.6 -1.2 L/min) The control circuit in Figure 8.17 shows the detailed symbol for this valve and the compound symbol is shown next to the valve.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 150
Hydraulics & Pneumatic Systems
8.16 Pressure reducing valve
8.17 Application of pressure reducing valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 151
Hydraulics & Pneumatic Systems
8.3 Flow control valves Flow-control valves are used in hydraulic systems to control the rate of flow from one part of the system to another. Flow-control devices (Figure 8.18) accomplish one or more of the following control functions: Limit the maximum speed of linear actuators and flow rate hydraulic motors. Limit the maximum power available to sub-circuits by controlling the flow to them (power= flow-rate x pressure ) Proportionally divide or regulate the pump flow to various branches of the circuit. A partly closed orifice or flow control valve in a hydraulic pressure line causes resistance to pump flow. This resistance raises the pressure upstream of the orifice to the level of the relief valve setting and any excess pump flow must pass via the relief valve to tank.
8.18 Application of flow control valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 152
Hydraulics & Pneumatic Systems
8.3.1 Simple restrictor valve (variable throttle valve) Variable restrictor type flow controls are used in control circuits where the controlled speed of the actuator is not critical and thus may vary if the actuator load fluctuates or the viscosity of the fluid undergoes changes. These valves usually consist of a valve body and a throttling screw for fine adjustment. Where speed control for only one actuator direction is required, a check valve for free flow in the reverse direction is essential. Some restrictor type flow controls have Inbuilt free-flow check valves (Figure 8.19).
8.19 Variable restrictor type flow controls
8.3.2 Flow control valve with pressure compensation Where accurate and consistent flow-rate control is required regardless of changes in the pressure differential (p), a pressure-compensated flow control should be used. Pressure compensation ensures that the flow rate (Q) through the valve is precisely maintained even if the upstream or downstream pressure should vary. Valve operation Flow passes from, port P through the pressure compensator orifice and then through the control orifice and leaves the valve at port A. Pressure compensation is based on the use of a pressure-positioned variable orifice (compensator orifice) upstream in a series arrangement with the control orifice (Figure 8.20)
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 153
Hydraulics & Pneumatic Systems
The ends of the compensator spool (hydrostatic switch) have precisely equal areas are hydraulically connected to the inlet and outlet of the control orifice. Hence in a static condition, the hydraulic forces will hold the compensator spool in balance but the bias spring will force it to the far right is holding the compensator orifice fully open. In the flow condition any pressure drop (p) less than the bias-spring force will not affect the fully open compensator orifice; but any pressure drop greater than the bias-spring force will reduce the compensator orifice. Any change in pressure on either side of the control orifice without a corresponding pressure change on the opposite side of the control orifice moves the compensator spool. Thus, a fixed pressure differential (p) across the control orifice is maintained at all times. By this means the valve holds the pre-set flow-rate across the control orifice constant.
8.20 Flow control valve with pressure compensation
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 154
Hydraulics & Pneumatic Systems
9. Hydraulic circuits
9.1 Regenerative circuits
Chapter 09
The figure below shows a regenerative circuit that is used to speed up the extending speed of a double-acting hydraulic cylinder. Here the pipelines to both ends of the hydraulic cylinder are connected to pump, one end (A) through the 2 / 3 way DCV and the other end (B) directly. The operation of the cylinder during the retraction stroke is the same as that of a regular doubleacting cylinder. Fluid flows through the DCV zero position from the actuator A side during retraction. In this position, fluid from the pump directly enters the rod end of the cylinder (direct connection). Fluid in the blank end drains back to the tank through the DCV as the cylinder retracts. When the DCV is shifted to 1 position due to manual actuation, the cylinder extends. The speed of extension is greater than that for a regular double-acting cylinder because flow from the rod end (QR) regenerates with the pump flow (QP) to provide a total flow rate (QT), which is greater than the pump flow rate to the A side of the cylinder. (Area of blank end is more than rod end, thereby blank end provide least resistance)
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 155
Hydraulics & Pneumatic Systems
C = Double acting cylinder P = Pump E = Electric Motor T = Tank F = Filter R = Relief Valve D = 2-position, 3 way, manually operated and spring return DCV
9.1.1 Application in Drilling Machine Here a 3-position, 4-way, regenerative center directional control valve is used. When the DCV is in the spring-centered position, port P is connected to A and B and tank port T is blocked. In this position pump flow goes to A and flow from rod end of the cylinder also joins the pump flow to gives rapid spindle advance (no work is done during this period).
Why does the spring-centered position give rapid extension of the cylinder (drill spindle)? The reason is simple. Oil from the rod end regenerates with the pump flow going to the blank end. This effectively increases pump flow to the blank end of the cylinder during the spring-centered mode of operation. Once again we have a regenerative cylinder. It should be noted that the cylinder used in a regenerative circuit is actually a regular double-acting cylinder. What makes it a regenerative cylinder is the way it is hooked up in the circuit. The blank and rod ends are connected in parallel during the extending stroke of a regenerative center.
When the DCV shifts to 1st position, P is connected to A and B to T gives slow feed (extension) when the drill starts to cut into the work piece. Similarly when the DCV shifts to 2nd position, P is connected to B and A is connected to T, since the ring area is less the cylinder will have fast return motion.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 156
Hydraulics & Pneumatic Systems
9.2 Speed control of Hydraulic Cylinder Speed control of a hydraulic cylinder is accomplished using a flow control valve. A flow control valve regulates the speed of the cylinder by controlling the flow rate to and of the actuator. There are 3 types of speed control: Meter- in circuit (Primary control) Meter-out circuit (Secondary control) Bleed - off circuit (By pass control)
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 157
Hydraulics & Pneumatic Systems
9.2.1 Meter in circuit In this type of speed control, the flow control valve is placed between the pump and the actuator. Thereby, it controls the amount of fluid going into the actuator. Fig 5.16 shows meterin circuit.
C = Double acting cylinder P = Pump T = Tank F = Filter R = Relief Valve CV = Check Valve FCV = Flow control Valve D =3-position, 4 way, Tandem center, manually operated, Spring Centered DCV
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 158
Hydraulics & Pneumatic Systems
When the directional control valve is actuated to the 1st position, oil flows through the flow control valve to extend the cylinder. The extending speed of the cylinder depends on the setting (percent of full opening position) of the flow control valve. When the directional control valve is actuated to the 2nd position, the cylinder retracts as oil flows from the cylinder to the oil tank through the check valve as well as the flow control valve. 9.2.2 Meter-out circuit
In this type of speed control, the flow control valve is placed between the actuator and the tank thereby; it controls the amount of fluid going out of the actuator. Figure below shows a meter-out circuit.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 159
Hydraulics & Pneumatic Systems
C = Double acting cylinder P = Pump T = Tank F = Filter R = Relief Valve CV = Check Valve FCV = Flow control Valve D =3-position, 4 way, Tandem center, manually operated and Spring Centered DCV Meter-in systems are used primarily when the external load opposes the direction of motion of the hydraulic cylinder. An example of the opposite situation is the case of a weight pulling downward on the piston rod of a vertical cylinder. In this case the weight would suddenly drop by pulling the piston rod down if a meter-in system is used even if the flow control valve is completely closed. Thus, the meter-out system is generally preferred over the meter-in type. One drawback of a meter-out system is the possibility of excessive pressure buildup in the rod end of the cylinder while it is extending. This is due to the magnitude of back pressure that the flow control valve can create depending on its nearness to being fully closed as well as the size of the external load and the piston-to-rod area ratio of the cylinder. In addition an excessive pressure buildup in the rod end of the cylinder results in a large pressure drop across the flow control valve. This produces the undesirable effect of a high heat generation rate with a resulting increase in oil temperature. 9.2.3 Bleed off Circuit
In this type of speed control, the flow control valve is placed between the pressure line and return line. Thereby, it controls the fluid by bleeding off the excess not needed by the working cylinder. Figure below shows the bleed-off circuit.
This type of flow control is much more efficient than the inlet restricting type for meter-in, because the bypass feature allows fluid to be exhausted to the tank at just slightly higher pressure than that necessary to do the work. With the meter-in type, pump delivery not used would discharge over the main relief valve at maximum pressure.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 160
Hydraulics & Pneumatic Systems
C = Double acting cylinder P = Pump T = Tank F = Filter R = Relief Valve CV = Check Valve FCV = Flow control Valve D =3-position, 4 way, Tandem center, manually operated and Spring Centered DCV
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 161
Hydraulics & Pneumatic Systems
9.2.4 Hydraulic Cylinder sequencing circuit
The sequence valve is closely related to the relief valve in its design and function. It permits hydraulic fluid to flow into a sub-circuit, when the pressure in the main circuit has reached the setting of the sequence valve. A typical application would be a clamp and spot weld circuit as shown in the figure below. The clamp actuator must be extended first, and as soon as the work-piece is clamped, the spot weld head actuator must extend. Both actuators are permitted to retract simultaneously. An optional reverse flow check valve is normally incorporated when the valve is required to operate between a directional control valve and an actuator. Valve operation The single-stage, spool-operated sequence valve is a normally closed valve. When pilot pressure at point X exceeds the pressure setting, the spool is raised against the spring, and fluid flows from primary port P to secondary port A. The valve requires an external drain, to permit internal fluid leakage past the spool land to drain back to tank. It must be noted that sequence valves require a reverse-flow check valve if return flow is required. Single-stage relief valves may also be remote controlled and all sequence valves are external drained because the secondary line leads to a pressurized sub-circuit.
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 162
Hydraulics & Pneumatic Systems
9.2.4.1 Automatic Cylinder Reciprocating System Figure below shows a circuit that produces continuous automatic reciprocation of a hydraulic cylinder. This is accomplished by using two sequence valves, each of which senses a stroke completion by the corresponding buildup of pressure. Each check valve and corresponding pilot line prevents shifting of the four-way valve until the particular stroke of the cylinder has been completed. The check valves are needed to allow pilot oil to leave either end of the DCV while pilot pressure is applied to the opposite end. This permits the spool of the DCV to shift as required. An alternative circuit diagram is shown in the Figure below. In the circuit as the cylinder reciprocates, the pilot directional valve is operated by solenoid DCV to supply fluid to either end of the main four way directional valve. This causes the machine to reciprocate automatically, and it will not stop until pump is shut off.
C = Double acting cylinder P = Pump SV = Sequence Valve CV = Check Valve R = Relief Valve T = Tank F = Filter D =2-position, 4 way, pilot operated DCV
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 163
Hydraulics & Pneumatic Systems
9.2.5
Pressure reducing circuits
The required downstream pressure (sub-circuit pressure) is adjusted and set on the pilot relief valve. Below the valve operating pressure, the valve spool is held wide open by the light spring and fluid passes from port P to port A with virtually no restriction. Static pressure equal to the pressure in the sub-circuit exists below the valve spool inside the valve spool and in front of the pilot relief valve. When the sub-circuit pressure increases and reaches the level of the valve setting, the pilot valve will-open and relieves flow to tank. This cause a pressure drop across the internal orifice (p) inside the valve spool, so that the higher pressure below the orifice forces the spool upwards against the spring. The spool will therefore remain balanced between the higher
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 164
Hydraulics & Pneumatic Systems
pressure below the orifice acting upwards and the lower pressure above the orifice, plus the light spring acting downwards. In this way the spool reduces or opens the flow passage from port P to port A and limits and maintains a constant pressure in the sub-circuit. When no flow is required in the sub-circuit, the valve will stay partially open and a fluid flow of some 0.6-1.2 l/min will continuously flow past the pilot valve to tank. Reverse free flow through the valve is only possible if the pressure in the sub-circuit is below the valve pressure setting. If the pressure exceeds the valve setting, the valve will close thus making reverse flow impossible. Therefore pressure reducing valves are often equipped with a check valve for reverse free flow. External forces acting onto a linear actuator will increase the pressure between the pressure reducing valve and the actuator. In some systems it is therefore desirable to relieve excess fluid from the secondary system to tank In order to maintain a constant downstream pressure, regardless of such external forces. The pressure reducing valve depicted in Figure below fulfils this function but only for a limited flow-rate (0.6-1.2 L/min) The control circuit In the Figure below shows the detailed symbol for this valve and the compound symbol is shown next to the valve
Department of Mech. & Mfg. Engg. M.I.T Manipal
Page 165
You might also like
- Mechatronics Lab ManualDocument54 pagesMechatronics Lab ManualAjay Chacko100% (1)
- Industrial Hydraulics & PneumaticsDocument23 pagesIndustrial Hydraulics & PneumaticsMONUNo ratings yet
- Chapter 7 - Hydraulic Operation Circuit and ApplicationDocument19 pagesChapter 7 - Hydraulic Operation Circuit and ApplicationMuhammad AbdullahNo ratings yet
- Components for Pneumatic Control Instruments: The Static and Dynamic Characteristics of Pneumatic Resistances, Capacitances and Transmission LinesFrom EverandComponents for Pneumatic Control Instruments: The Static and Dynamic Characteristics of Pneumatic Resistances, Capacitances and Transmission LinesNo ratings yet
- Unit - I: Two Mark Questions & AnswersDocument8 pagesUnit - I: Two Mark Questions & Answerssmg26thmayNo ratings yet
- Mechanical ActuatorsDocument19 pagesMechanical Actuatorsjasonmani90100% (1)
- Practical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansFrom EverandPractical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansRating: 4 out of 5 stars4/5 (8)
- EHP-5 Pneumatics and Hydraulics COURSE 2-1441-1442 New UpdateDocument255 pagesEHP-5 Pneumatics and Hydraulics COURSE 2-1441-1442 New UpdateOSAMA ALRIFAI100% (1)
- MODULE 2 Intro - Lab HydraulicDocument3 pagesMODULE 2 Intro - Lab HydraulicHafiz Melliani100% (1)
- Hydraulic Circuits: Introduction ToDocument161 pagesHydraulic Circuits: Introduction ToahmedNo ratings yet
- Hydraulics and Pneumatics SystemsDocument4 pagesHydraulics and Pneumatics SystemsKrista JacksonNo ratings yet
- Troubleshooting HydraulicsDocument54 pagesTroubleshooting HydraulicsM.nour El-din100% (3)
- Basic Principles of Pneumatics and Electropneumatics Textbook 573030Document24 pagesBasic Principles of Pneumatics and Electropneumatics Textbook 573030Htoon Zaw LinnNo ratings yet
- Pneumatics vs Hydraulics: A ComparisonDocument19 pagesPneumatics vs Hydraulics: A ComparisonGebBerheNo ratings yet
- Hydraulic Circuits Tutorial PDFDocument40 pagesHydraulic Circuits Tutorial PDFShaheen S. Ratnani69% (13)
- Industrial HydraulicsDocument86 pagesIndustrial HydraulicsPrakash KumarNo ratings yet
- FLUID POWER SYSTEMS Theory and PracticeDocument37 pagesFLUID POWER SYSTEMS Theory and PracticeAchmad Ari Dwi P100% (2)
- Hydraulics Basic Level PDFDocument276 pagesHydraulics Basic Level PDFIwan Sb100% (1)
- 2017 Industrial Hydraulics & Pneumatics Reference ManualDocument115 pages2017 Industrial Hydraulics & Pneumatics Reference ManualFati Mah100% (2)
- Electro HydraulicsDocument202 pagesElectro HydraulicsRavikumar GangadharanNo ratings yet
- Hydraulic SystemDocument82 pagesHydraulic SystemOnyx_nwa100% (18)
- Linear GuidesDocument76 pagesLinear GuidesFelipe Soares MaiaNo ratings yet
- Module - Time Delay ValveDocument9 pagesModule - Time Delay ValvescribdNo ratings yet
- Hydraulics and Pneumatics 1998 PDFDocument255 pagesHydraulics and Pneumatics 1998 PDFDaniel salgado yañez100% (1)
- ME 1305 - Applied Hydraulics and PneumaticsDocument7 pagesME 1305 - Applied Hydraulics and PneumaticsUva ShruthikaNo ratings yet
- Hydraulics Intro PDFDocument81 pagesHydraulics Intro PDFavinash babuNo ratings yet
- FIRST Pneumatics: Introduction To Air Power by Bob Koehl Team Ford FIRST Team Ford FIRST andDocument35 pagesFIRST Pneumatics: Introduction To Air Power by Bob Koehl Team Ford FIRST Team Ford FIRST andÖzgür DalNo ratings yet
- Hydraulic Pumps and MotorsDocument24 pagesHydraulic Pumps and MotorsMohammed Al-OdatNo ratings yet
- Pneumatic Based Punching MachineDocument45 pagesPneumatic Based Punching Machineraja100% (3)
- EE060 Electro Hydraulic Controls TP InstDocument141 pagesEE060 Electro Hydraulic Controls TP InstSameera KodikaraNo ratings yet
- Hydraulic Circuits GuideDocument61 pagesHydraulic Circuits Guidehamidou100% (2)
- 7 Hydraulic Circuit DesignDocument10 pages7 Hydraulic Circuit Designyohannis mulu100% (1)
- Industrial HydraulicsDocument177 pagesIndustrial Hydraulicspaulo josé sá patacho100% (2)
- Hydraulic System 1Document28 pagesHydraulic System 1Udhaya Kumar100% (1)
- Zhang, Qin - Basics of Hydraulic Systems PDFDocument339 pagesZhang, Qin - Basics of Hydraulic Systems PDFNeha Gupta100% (1)
- Electro Pneumatics m2 StudentDocument21 pagesElectro Pneumatics m2 StudentArt NidayNo ratings yet
- Electro Pneumatics Technical ReferenceDocument110 pagesElectro Pneumatics Technical ReferenceKhanNo ratings yet
- Electro Hydraulics: Control Technology ConceptsDocument98 pagesElectro Hydraulics: Control Technology Concepts@nshu_theachiever88% (8)
- Introduction of MechatronicsDocument23 pagesIntroduction of MechatronicsSathish SatNo ratings yet
- FESTO Basic PnuematicsDocument115 pagesFESTO Basic Pnuematicsapi-3769014100% (10)
- Application and Analysis in Fluid Power SystemsDocument288 pagesApplication and Analysis in Fluid Power Systemskhursheirani100% (1)
- Me8694 - Hydraulics and Pneumatics: Arulprakasam G Assistant Professor Dept - Of.mech - Engg., Kit-CbeDocument12 pagesMe8694 - Hydraulics and Pneumatics: Arulprakasam G Assistant Professor Dept - Of.mech - Engg., Kit-CbeArul Prakasam GNo ratings yet
- Kinematic Diagrams & Degrees of Freedom ExplainedDocument17 pagesKinematic Diagrams & Degrees of Freedom Explainedrezkyrivaldo94No ratings yet
- Fluid Power with ApplicationsDocument9 pagesFluid Power with ApplicationstadiwosNo ratings yet
- Hydraulic&Pneumatic (New)Document71 pagesHydraulic&Pneumatic (New)Saptarshi Basu100% (1)
- FESTO Hydraulics CourseDocument236 pagesFESTO Hydraulics Coursemadmax2222100% (17)
- Basic Electrical Controls For Fluid Power CircuitsDocument69 pagesBasic Electrical Controls For Fluid Power Circuitsloveincyber3No ratings yet
- Fluid Power, Mechatronics, and ControlDocument31 pagesFluid Power, Mechatronics, and ControlVinoth KumarNo ratings yet
- Basics of Hydraulic CircuitsDocument48 pagesBasics of Hydraulic Circuitslaxman_det95% (22)
- Electro Hydraulics Decoded PDFDocument101 pagesElectro Hydraulics Decoded PDFRobert Markovski100% (1)
- Neutral Position in DCVDocument6 pagesNeutral Position in DCVAimee SpearsNo ratings yet
- Electro - Hydraulics 1Document29 pagesElectro - Hydraulics 1asdNo ratings yet
- Hydraulics & Pneumatic Systems DepartmentDocument168 pagesHydraulics & Pneumatic Systems DepartmentVolety_Sarma_1703No ratings yet
- LAPORAN P2 After RevDocument16 pagesLAPORAN P2 After RevzakiNo ratings yet
- Pneumatics System: Operation of A Single Acting Cylinder Controlled by 3-Way ValveDocument14 pagesPneumatics System: Operation of A Single Acting Cylinder Controlled by 3-Way ValveMubarak ShehuNo ratings yet
- Chapter 1 Part ADocument26 pagesChapter 1 Part AYip Tuck WaiNo ratings yet
- Ammunition Design ReportDocument58 pagesAmmunition Design ReportAakash Singh0% (1)
- ExtrusionDocument20 pagesExtrusionAakash Singh100% (5)
- RollingDocument14 pagesRollingAakash SinghNo ratings yet
- Power Generation From CoalDocument114 pagesPower Generation From CoalOral KarahanNo ratings yet
- Sensors and TransducersDocument38 pagesSensors and TransducersAakash SinghNo ratings yet
- Sheet Metal FormingDocument35 pagesSheet Metal FormingAakash Singh100% (1)
- Jigs and FixturesDocument112 pagesJigs and FixturesAakash Singh100% (4)
- EDTA - Chemical CleaningDocument20 pagesEDTA - Chemical Cleaningveladandi100% (1)
- DICKEY-john - Parts Catalog 2008Document64 pagesDICKEY-john - Parts Catalog 2008Arildo José de LimaNo ratings yet
- Load Sensing Pump ControlDocument4 pagesLoad Sensing Pump ControlNachiketNo ratings yet
- Pompe Clu3 E1001 Carte TehnicaDocument2 pagesPompe Clu3 E1001 Carte TehnicaAnonymous RCPxaonfvNo ratings yet
- Odour Scrubber Equipment DesignDocument12 pagesOdour Scrubber Equipment DesignSaleem BaigNo ratings yet
- Hydraulic System Components of RH340B ExcavatorDocument14 pagesHydraulic System Components of RH340B ExcavatorhectorNo ratings yet
- 10 - Uni-Air Pnevmatika-VENTILI ELEKTRO AzDocument6 pages10 - Uni-Air Pnevmatika-VENTILI ELEKTRO AzFaruk AvdićNo ratings yet
- Pei Rp1000 Final TocDocument4 pagesPei Rp1000 Final Tocmedrascom0% (1)
- Technical Datasheet: Pacific®CSV Cast Steel ValvesDocument16 pagesTechnical Datasheet: Pacific®CSV Cast Steel ValvesAnderson SiqueiraNo ratings yet
- Concentric Tube Heat Exchanger Lab ManualDocument18 pagesConcentric Tube Heat Exchanger Lab ManualAtif MehfoozNo ratings yet
- Startup Guidelines For GTGDocument24 pagesStartup Guidelines For GTGnayear100% (1)
- T32 SERIES INSTRUCTION MANUAL TWO-STAGE HIGH PRESSURE INDUSTRIAL AIR COMPRESSORSDocument32 pagesT32 SERIES INSTRUCTION MANUAL TWO-STAGE HIGH PRESSURE INDUSTRIAL AIR COMPRESSORSRaimundo GuevaraNo ratings yet
- Rancilio RS1 2G 3G AUDocument23 pagesRancilio RS1 2G 3G AUSina BrousanNo ratings yet
- GENRALDocument274 pagesGENRALRavi BhaskarNo ratings yet
- Graham - Proper Piping For Vacuum SystemDocument5 pagesGraham - Proper Piping For Vacuum SystemAnonymous DJrec2No ratings yet
- @statoil Tr1082Document13 pages@statoil Tr1082Cristian BoselliNo ratings yet
- Cat Forklift Nrr30 Nrr30p Nrr35 Nrr35p Nrr40 Nrr45p Service ManualDocument27 pagesCat Forklift Nrr30 Nrr30p Nrr35 Nrr35p Nrr40 Nrr45p Service Manualangelahorton220692gom100% (81)
- Od15x21ys0 Vei 8a 12 Na PoppetDocument4 pagesOd15x21ys0 Vei 8a 12 Na PoppetGabrielNo ratings yet
- Lanco Kondapalli power plant failures and best practicesDocument4 pagesLanco Kondapalli power plant failures and best practiceschdeepak96No ratings yet
- 15no03-Ds-020-006 Diesel Engine Fire Water Pump (3322-P-004)Document6 pages15no03-Ds-020-006 Diesel Engine Fire Water Pump (3322-P-004)bagus handoko100% (1)
- en SD116 TF Voe21a1004254h PDFDocument223 pagesen SD116 TF Voe21a1004254h PDFleo velasquez100% (2)
- Boiler Inspection GuideDocument58 pagesBoiler Inspection GuideSadashiw PatilNo ratings yet
- AM2755 - Testing, Commissioning and Handover Template Rev T0Document40 pagesAM2755 - Testing, Commissioning and Handover Template Rev T0Mohammed MuzakkirNo ratings yet
- Landing Gear / Nws Brakes: X F/CTL Altn Law (Prot Lost)Document1 pageLanding Gear / Nws Brakes: X F/CTL Altn Law (Prot Lost)Elias IruelaNo ratings yet
- Avamo Broschuere EN-2019-11Document12 pagesAvamo Broschuere EN-2019-11Aman Meidanloo0% (1)
- Maintain and service guide for combination boilerDocument12 pagesMaintain and service guide for combination boilernitescucipNo ratings yet
- Air Receiver Tank Hazard ChecklistDocument2 pagesAir Receiver Tank Hazard ChecklistJade JavierNo ratings yet
- Process Piping Drafting Course Outlines (FINAL)Document13 pagesProcess Piping Drafting Course Outlines (FINAL)andrew myintmyatNo ratings yet
- 10Document76 pages10defiunikasungti100% (1)
- Industrial Water Softener SystemsDocument2 pagesIndustrial Water Softener SystemsDaniel AquinoNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)