You might also like
- Multisim Unsolved Questions BITS PilaniDocument2 pagesMultisim Unsolved Questions BITS Pilanimanish_genus100% (1)
- Operating System Concepts (Exercises and Answers) Part IDocument3 pagesOperating System Concepts (Exercises and Answers) Part IAlfred Fred67% (6)
- Design Via Root Locus and Frequency ResponseDocument15 pagesDesign Via Root Locus and Frequency ResponseBran WzNo ratings yet
- J. R. Lucas - Three Phase TheoryDocument19 pagesJ. R. Lucas - Three Phase TheoryQM_2010No ratings yet
- BJT Biasing (Complete)Document64 pagesBJT Biasing (Complete)Hung PhamNo ratings yet
- Trapezoidal RuleDocument10 pagesTrapezoidal RuleRicardo Wan Aguero0% (1)
- 3 Phase Voltage FolumarsDocument12 pages3 Phase Voltage FolumarsrocaoNo ratings yet
- Transient Analysis of Three-Phase Power SystemsDocument35 pagesTransient Analysis of Three-Phase Power SystemsBerly NoviantoniNo ratings yet
- S Domain AnalysisDocument20 pagesS Domain AnalysisKasunShreeBandaraNo ratings yet
- Root Locus TechniqueDocument43 pagesRoot Locus TechniqueAzeem SarwarNo ratings yet
- EE423 Fault Analysis NotesDocument26 pagesEE423 Fault Analysis NotesadnanNo ratings yet
- Sketching A Root Locus PlotDocument9 pagesSketching A Root Locus PlotsajjadnedianNo ratings yet
- Fiber Optics NotesDocument12 pagesFiber Optics NotesMonika HansdaNo ratings yet
- Printed Notes On Operational Amplifiers and Differential Amplifier and Numericals Based On The SameDocument98 pagesPrinted Notes On Operational Amplifiers and Differential Amplifier and Numericals Based On The SameDiptiNo ratings yet
- Control System Synthesis by Root Locus MethodDocument6 pagesControl System Synthesis by Root Locus MethodcastrojpNo ratings yet
- UNIT 1 ElectrostaticsDocument46 pagesUNIT 1 ElectrostaticsHimanshu BhandariNo ratings yet
- Multistage Transistor AmplifiersDocument8 pagesMultistage Transistor Amplifiersbree789No ratings yet
- Engineering Prob & Stat Lecture Notes 6Document12 pagesEngineering Prob & Stat Lecture Notes 6EICQ/00154/2020 SAMUEL MWANGI RUKWARONo ratings yet
- Differential AmplifierDocument15 pagesDifferential AmplifierrppvchNo ratings yet
- Circuit Analysis With Laplace Transform (Week 6) PDFDocument7 pagesCircuit Analysis With Laplace Transform (Week 6) PDFmaaz ansariNo ratings yet
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
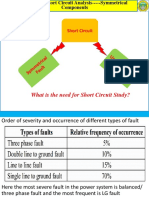
- Symmetrical ComponentsDocument54 pagesSymmetrical ComponentsShuvo ShahedNo ratings yet
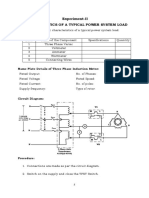
- 2.characteristics of A Typical Power System LoadDocument3 pages2.characteristics of A Typical Power System Loadarjuna4306No ratings yet
- Signals and SystemsDocument17 pagesSignals and SystemsSanthosh Vegeta Goku GNo ratings yet
- Alternating Currents Part BDocument30 pagesAlternating Currents Part BShejuti KarmakarNo ratings yet
- 08-Com101 AMDocument11 pages08-Com101 AMHồng HoanNo ratings yet
- Lecture 4 Maximum PrincipleDocument21 pagesLecture 4 Maximum Principlemohamed-gamaaNo ratings yet
- Symmetrical Components 2Document15 pagesSymmetrical Components 2CaribNo ratings yet
- Symmetrical ComponentsDocument18 pagesSymmetrical ComponentsBante TadeleNo ratings yet
- Analysis Using Laplace Function 3Document33 pagesAnalysis Using Laplace Function 3hafidahnsNo ratings yet
- Fixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaDocument9 pagesFixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaNitish_Katal_9874No ratings yet
- Energy Levels of Semiconductor, Conductors and InsulatorsDocument53 pagesEnergy Levels of Semiconductor, Conductors and InsulatorsTawki BakiNo ratings yet
- FM Frequency Modulation EngineersTutorDocument11 pagesFM Frequency Modulation EngineersTutorImelda SuloNo ratings yet
- Assignment 2-1Document2 pagesAssignment 2-1areejNo ratings yet
- An Introduction To Symmetrical Components, System Modeling and Fault CalculationDocument75 pagesAn Introduction To Symmetrical Components, System Modeling and Fault CalculationCai_waiBeioanNo ratings yet
- Bode Plots and S-Domain AnalysisDocument23 pagesBode Plots and S-Domain AnalysispowerdeadlifterNo ratings yet
- Ch04 First Order Circuits PDFDocument96 pagesCh04 First Order Circuits PDFMichelle BatadNo ratings yet
- New Microsoft Word DocumentDocument13 pagesNew Microsoft Word DocumentAhmad RaheelNo ratings yet
- AC FundamentalsDocument30 pagesAC FundamentalsSouhardya RoyNo ratings yet
- Chapter 1 Coulomb's Law PDFDocument43 pagesChapter 1 Coulomb's Law PDFChitra Ashutosh Tembe50% (2)
- Differences Between Mup and MucDocument2 pagesDifferences Between Mup and Mucrihatrivedi_069No ratings yet
- Tutorial 1 Drawing A Transistor Sensing CircuitDocument7 pagesTutorial 1 Drawing A Transistor Sensing CircuitFernando ValenteNo ratings yet
- Application of Laplace TransformDocument35 pagesApplication of Laplace TransformSingappuli100% (1)
- Lab 7 FM POCDocument7 pagesLab 7 FM POCSPARK LIGHTSNo ratings yet
- Op-Amp Basic Stages: Adama UniversityDocument18 pagesOp-Amp Basic Stages: Adama Universitygebretsadkan abrhaNo ratings yet
- Ground Fault CurrentDocument5 pagesGround Fault Currentjsrplc7952No ratings yet
- SEEA1301Document137 pagesSEEA1301Chintapalli Ramesh KumarNo ratings yet
- AN108A Inductive Load Arc SuppressionDocument3 pagesAN108A Inductive Load Arc SuppressionihsanjuNo ratings yet
- Experiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit DiagramDocument4 pagesExperiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit Diagrampandiyarajan142611No ratings yet
- Coordinate SystemDocument7 pagesCoordinate SystemSarwar Hosen SimonNo ratings yet
- 03 Load Flow SolutionDocument61 pages03 Load Flow Solutionবিবেক রত্নNo ratings yet
- Differentiator and IntegratorDocument5 pagesDifferentiator and Integratorvinit.vermaNo ratings yet
- EC - Unit 4 - Negative FeedbackDocument12 pagesEC - Unit 4 - Negative Feedbacknanobala15No ratings yet
- Bode Plots: Multiple Choice Questions For Online ExamDocument23 pagesBode Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtNo ratings yet
- Design of PID ControllerDocument13 pagesDesign of PID ControllershrikrisNo ratings yet
- Nyquist Stability CriterionDocument7 pagesNyquist Stability CriterionArul RajNo ratings yet
- Computer and Robot Vision, Vol 1Document682 pagesComputer and Robot Vision, Vol 1Dibyendu Mukherjee100% (1)
- Nyquist Plot ExptDocument7 pagesNyquist Plot ExptMANOJ KUMAR DASNo ratings yet
- Application of Fourier's Allied Integrals To The Kramers-Kronig Transformation of Reflectance DataDocument8 pagesApplication of Fourier's Allied Integrals To The Kramers-Kronig Transformation of Reflectance Datapomon666No ratings yet
- An Adaptive, Fixed-Point Version of Grover's Algorithm: Robert R. Tucci P.O. Box 226 Bedford, MA 01730 October 23, 2018Document20 pagesAn Adaptive, Fixed-Point Version of Grover's Algorithm: Robert R. Tucci P.O. Box 226 Bedford, MA 01730 October 23, 2018makumba1972No ratings yet
- General Use Power - SE SponsorshipDocument49 pagesGeneral Use Power - SE SponsorshipmoosuhaibNo ratings yet
- LV SwitchGears - SE SponsorshipDocument70 pagesLV SwitchGears - SE SponsorshipmoosuhaibNo ratings yet
- Lighting Design - SE SponsorshipDocument71 pagesLighting Design - SE SponsorshipmoosuhaibNo ratings yet
- Building Construction CostingDocument3 pagesBuilding Construction CostingmoosuhaibNo ratings yet
- Electrical Spaces Design PresentationDocument97 pagesElectrical Spaces Design PresentationmoosuhaibNo ratings yet
- Kmpp-06-Ele-CA-004 Calculation of Earthing & Lightning Protection Systems - Terminal Station Rev0Document13 pagesKmpp-06-Ele-CA-004 Calculation of Earthing & Lightning Protection Systems - Terminal Station Rev0moosuhaibNo ratings yet
- MEP Coordination - SE SponsorshipDocument42 pagesMEP Coordination - SE SponsorshipmoosuhaibNo ratings yet
- Applsci 11 11564 v2Document22 pagesApplsci 11 11564 v2moosuhaibNo ratings yet
- Healthcare Functional Design BriefDocument86 pagesHealthcare Functional Design BriefmoosuhaibNo ratings yet
- Lec.01 - Building Design Concept - SE Sponsor 2021Document20 pagesLec.01 - Building Design Concept - SE Sponsor 2021moosuhaibNo ratings yet
- Lec.02 - Bulky EquipmentDocument37 pagesLec.02 - Bulky EquipmentmoosuhaibNo ratings yet
- Industrial Buildings Solutions GuideDocument39 pagesIndustrial Buildings Solutions GuidemoosuhaibNo ratings yet
- Surge ArresterDocument17 pagesSurge ArrestermoosuhaibNo ratings yet
- UniPack-G Catalog Rev C 1VPD110001A0355 PDFDocument60 pagesUniPack-G Catalog Rev C 1VPD110001A0355 PDFmoosuhaibNo ratings yet
- 1.eaton ACB MWI SeriesDocument19 pages1.eaton ACB MWI SeriesmoosuhaibNo ratings yet
- Protection RelaysDocument87 pagesProtection Relaysmoosuhaib100% (1)
- Tachick Isolation Overview PDFDocument52 pagesTachick Isolation Overview PDFmoosuhaibNo ratings yet
- Protection ControlDocument101 pagesProtection ControlmoosuhaibNo ratings yet
- Calculate Size of Diesel Generator 22-8-12Document1 pageCalculate Size of Diesel Generator 22-8-12moosuhaibNo ratings yet
- 02 Lightning Rods and AccessoriesDocument78 pages02 Lightning Rods and Accessoriesmoosuhaib100% (1)
- Operations Manual - Manual de Instrucciones Manuel D' Instructions - BedienungshandbuchDocument25 pagesOperations Manual - Manual de Instrucciones Manuel D' Instructions - BedienungshandbuchAngel Andony Nuñez MoyaNo ratings yet
- Lab Report #1Document10 pagesLab Report #1Muhammad EhtishamNo ratings yet
- Exploring Sas Enterprise Miner Special CollectionDocument116 pagesExploring Sas Enterprise Miner Special CollectionluiNo ratings yet
- Business Developer ResumeDocument5 pagesBusiness Developer ResumeGary AndersonNo ratings yet
- Bre 343Document10 pagesBre 343anarNo ratings yet
- Assignment MLDocument21 pagesAssignment MLManish Verma100% (2)
- LS6. Computer Operation Leah GDocument3 pagesLS6. Computer Operation Leah GConnie LopicoNo ratings yet
- Application Note: Calibration at Toyota Motor Corporation Using Vibration Transducer Calibration System Type 9610Document4 pagesApplication Note: Calibration at Toyota Motor Corporation Using Vibration Transducer Calibration System Type 9610jhon vargasNo ratings yet
- Unit - 5 NotesDocument9 pagesUnit - 5 NotesprofsureshkkumarNo ratings yet
- BAM-S10-07 CO2 in Beer in Bulk - Zahm Nagel - Feb99aDocument10 pagesBAM-S10-07 CO2 in Beer in Bulk - Zahm Nagel - Feb99aRiyanNo ratings yet
- Dmne To Dmo Command ComparisonDocument1 pageDmne To Dmo Command ComparisonMNo ratings yet
- Continuous Testing Report 2020 From Sogeti and BroadcomDocument40 pagesContinuous Testing Report 2020 From Sogeti and BroadcomSimonNo ratings yet
- Digital IndiaDocument4 pagesDigital IndiaGamers N2No ratings yet
- Itk - Tugas 3Document12 pagesItk - Tugas 3Riski Lya AmaliaNo ratings yet
- Vol I OppenheimerDocument165 pagesVol I Oppenheimerpeter stoschNo ratings yet
- GMS Mass BalanceDocument9 pagesGMS Mass BalanceMatichon ChamchooklinNo ratings yet
- Arch-3.1-Aluminium Doors and WindowsDocument3 pagesArch-3.1-Aluminium Doors and WindowsSherazNo ratings yet
- Thesis Proposal Sample Computer ScienceDocument7 pagesThesis Proposal Sample Computer Scienceheduurief100% (2)
- Velidhineni Divyamalathi TKTDocument2 pagesVelidhineni Divyamalathi TKTfx.khammamNo ratings yet
- Vehicle Construction Kit Artillery II CatapultsDocument12 pagesVehicle Construction Kit Artillery II CatapultsSentinel Playz TMNo ratings yet
- Torque To Yield HeadboltsDocument2 pagesTorque To Yield HeadboltsEric LaPointeNo ratings yet
- MC Formula - 2013 11Document104 pagesMC Formula - 2013 11Muhammad RidhoNo ratings yet
- Pocadel 9. B15 GLAZED SLIDING DOOR DELI Double Automatic or Manual PDFDocument1 pagePocadel 9. B15 GLAZED SLIDING DOOR DELI Double Automatic or Manual PDFSanjeev PalNo ratings yet
- Assignment 01Document3 pagesAssignment 01Nick jamesNo ratings yet
- MA2401 Lecture NotesDocument270 pagesMA2401 Lecture NotesJojo LomoNo ratings yet
- Chess and Bridge 2016 CatalogueDocument48 pagesChess and Bridge 2016 CatalogueJTauroNo ratings yet
- 2K19 - EC - 026 ANUJ YADAV's ResumeDocument1 page2K19 - EC - 026 ANUJ YADAV's ResumeAnuj YadavNo ratings yet
- Transmision - 4ta y 3ra PortadoraDocument1 pageTransmision - 4ta y 3ra Portadoramauro perezNo ratings yet
- LECTURE 2 The Design Process - Sem 1 - 2022 - 2023Document35 pagesLECTURE 2 The Design Process - Sem 1 - 2022 - 2023Idham NasrulNo ratings yet