You might also like
- Relay Coordination SampleDocument20 pagesRelay Coordination SampleMind of Beauty100% (3)
- Guide To Industrial Control PanelsDocument270 pagesGuide To Industrial Control PanelsHaroon Zafar100% (1)
- Compliance Sheet For Feeder PillarsDocument1 pageCompliance Sheet For Feeder PillarsHamad GulNo ratings yet
- Gensizing For MotorsDocument4 pagesGensizing For MotorsaderezoNo ratings yet
- Sizing of Generator SetsDocument4 pagesSizing of Generator Setsjose angel camara santosNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- VCB, ViderDocument47 pagesVCB, Viderhs_handsomeNo ratings yet
- LV SwitchgearS-GEDocument8 pagesLV SwitchgearS-GEJuan E Torres MNo ratings yet
- Okken Solution GuideDocument26 pagesOkken Solution GuideShailesh ChettyNo ratings yet
- Katalog EneloopDocument16 pagesKatalog Eneloopdemo1967No ratings yet
- LV Switchboards 8PU + BusductsDocument18 pagesLV Switchboards 8PU + BusductssutanuprojectsNo ratings yet
- Cat LV PowerFactorCorrectionDocument88 pagesCat LV PowerFactorCorrectionKais AbichouNo ratings yet
- Appendix A Technical Specification PhotovoltaicsDocument4 pagesAppendix A Technical Specification Photovoltaics4gen_1No ratings yet
- Inversor PVS800-MWS 1 - 2.4 MWDocument4 pagesInversor PVS800-MWS 1 - 2.4 MWandres gascaNo ratings yet
- Off-Grid Storage SystemDocument9 pagesOff-Grid Storage SystempennacchiettiNo ratings yet
- Metering For Linemen: Current TransformersDocument3 pagesMetering For Linemen: Current TransformersEBENo ratings yet
- Schneider Electric Storage Solutions - 20160627Document23 pagesSchneider Electric Storage Solutions - 20160627Azree Mohd NoorNo ratings yet
- GAVE 099CA00567.05EN - LowDocument32 pagesGAVE 099CA00567.05EN - LowRahmat Nur IlhamNo ratings yet
- English M21 Inverter, UPS and Battery (SSEE4)Document12 pagesEnglish M21 Inverter, UPS and Battery (SSEE4)john power100% (1)
- Gino-Aka: Industrial AutomationDocument8 pagesGino-Aka: Industrial Automationhsouna nasfiNo ratings yet
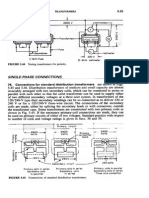
- Transformers ConnectionsDocument6 pagesTransformers Connectionsgeorgel1980No ratings yet
- Preparation of Transformer Specifications1Document56 pagesPreparation of Transformer Specifications1ahmaborashedNo ratings yet
- Modeling of Three-Winding Transformers PDFDocument20 pagesModeling of Three-Winding Transformers PDFGhislainNo ratings yet
- Pole No. Number and Type of Transformer Lighting Refrigerator Electric Range Water Heater Maximum Demand KVADocument6 pagesPole No. Number and Type of Transformer Lighting Refrigerator Electric Range Water Heater Maximum Demand KVAmaria neneng bulakNo ratings yet
- Abb VCB DetailsDocument20 pagesAbb VCB DetailsSher Bahadur VermaNo ratings yet
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodNo ratings yet
- 2000kva Power ModuleDocument8 pages2000kva Power ModuleIrfan SaeedNo ratings yet
- Design of VCBDocument14 pagesDesign of VCBAniruth100% (1)
- Blokset: Modular DesignationDocument2 pagesBlokset: Modular DesignationJabir Quadri100% (1)
- Generator Sizing GuidelinesDocument1 pageGenerator Sizing Guidelinescoolside111No ratings yet
- Power Xpert CX (Actualizado)Document20 pagesPower Xpert CX (Actualizado)GUSTAVO DUARTENo ratings yet
- Sivacon 8PT-Busbar Rear-Technical CatalogueDocument69 pagesSivacon 8PT-Busbar Rear-Technical CatalogueLaurentiu CatalinNo ratings yet
- Soft Starter Vs VFDDocument2 pagesSoft Starter Vs VFDaqhammamNo ratings yet
- C&S LV Price Schedule - 2016Document114 pagesC&S LV Price Schedule - 2016shahsaurabhshah6965100% (1)
- g83 2 Single Premises Connection GuideDocument44 pagesg83 2 Single Premises Connection Guideabbd1990No ratings yet
- Peco (Distribution Transformer)Document29 pagesPeco (Distribution Transformer)Farhan SaadatNo ratings yet
- L&T - Tera Ts Catalogue PDFDocument16 pagesL&T - Tera Ts Catalogue PDFanujpkr5118No ratings yet
- Copy (2) of B32e - Medium Voltage Switchgear Application GuideDocument20 pagesCopy (2) of B32e - Medium Voltage Switchgear Application GuideSabir NaseerNo ratings yet
- 03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)Document12 pages03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)juliancansenNo ratings yet
- How To Read A Motor NameplateDocument8 pagesHow To Read A Motor Nameplateabdulyunus_amirNo ratings yet
- Transformer Modelling:-1.) Application of TransformersDocument17 pagesTransformer Modelling:-1.) Application of TransformersVasudevan KunjithapathamNo ratings yet
- Transient Stability Assessment of Power System With Large Amount of Wind Power Penetration The Danish Case StudyDocument8 pagesTransient Stability Assessment of Power System With Large Amount of Wind Power Penetration The Danish Case StudyThức VõNo ratings yet
- Power and Distribution Transformers Sizing Calculations - Part Nine Electrical KnowhowDocument11 pagesPower and Distribution Transformers Sizing Calculations - Part Nine Electrical KnowhowRodel PelimianoNo ratings yet
- Generators - Particular Technical SpecificationDocument96 pagesGenerators - Particular Technical SpecificationAli HEIDARINo ratings yet
- PLC Vs ControllerDocument4 pagesPLC Vs ControllerththeeNo ratings yet
- Bel-Electrical SubstationDocument21 pagesBel-Electrical SubstationGagan MaheyNo ratings yet
- Trfo Voltage DropDocument74 pagesTrfo Voltage DropshivvaramNo ratings yet
- TMEIC Motors and DrivesDocument57 pagesTMEIC Motors and DrivesSudhakar NNo ratings yet
- EATON Protection and Control RelaysDocument8 pagesEATON Protection and Control RelaysRazvan MaresNo ratings yet
- Ga Drwing-3-Way Das Rmu-Rrl+meDocument1 pageGa Drwing-3-Way Das Rmu-Rrl+mefrosterapNo ratings yet
- Dehn Prenaponska ZaštitaDocument383 pagesDehn Prenaponska ZaštitaMilica LolićNo ratings yet
- Technical Issues On Distributed Generation (DG) Connection and GuidelinesDocument4 pagesTechnical Issues On Distributed Generation (DG) Connection and GuidelinesKristiano RonaldoNo ratings yet
- ABB RelaysDocument58 pagesABB RelaysNandkumar ChinaiNo ratings yet
- Introduction of Electric Power SystemDocument17 pagesIntroduction of Electric Power SystemsohaibNo ratings yet
- Absolyte Engineering PDFDocument110 pagesAbsolyte Engineering PDFwizlishNo ratings yet
- Technical Catalogue of ABB Make MCBsDocument174 pagesTechnical Catalogue of ABB Make MCBsdipakishereNo ratings yet
- MV Air-Insulated Equipment De-Rating For High Altitude InstallationsDocument11 pagesMV Air-Insulated Equipment De-Rating For High Altitude InstallationsGino XqNo ratings yet
- Design and Implementation of A Solar Power SystemDocument6 pagesDesign and Implementation of A Solar Power SystemEditor IJTSRDNo ratings yet
- MDCC-T30 0 11Document7 pagesMDCC-T30 0 11darrylcarvalhoNo ratings yet
- Tutorial T5 Buchholz RelayDocument2 pagesTutorial T5 Buchholz RelayMind of BeautyNo ratings yet
- How To Make Accurate Inrush Current MeasurementsDocument2 pagesHow To Make Accurate Inrush Current MeasurementsMind of Beauty100% (1)
- Tutorial T1 ImpedanceDocument2 pagesTutorial T1 Impedanceseshubabu_999No ratings yet
- Electric Arc Furnace - CapacitorsDocument15 pagesElectric Arc Furnace - CapacitorsMind of Beauty100% (1)
- Why Specify A Short CKT Study and Coordination StudyDocument4 pagesWhy Specify A Short CKT Study and Coordination StudyRitesh JaiswalNo ratings yet
- Power System Harmonic MitigationDocument12 pagesPower System Harmonic MitigationMind of Beauty100% (1)
- Evaluating Motor and Transformer Inrush CurrentsDocument4 pagesEvaluating Motor and Transformer Inrush CurrentsMind of BeautyNo ratings yet
- AC Motor Control CircuitDocument29 pagesAC Motor Control CircuitThong Kin MunNo ratings yet
- Application of Zigzag TransformerDocument6 pagesApplication of Zigzag Transformerpd110382No ratings yet
- ALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Document14 pagesALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Alda EnglandNo ratings yet
- Short-Circuit Calculation MethodsDocument5 pagesShort-Circuit Calculation MethodsMind of BeautyNo ratings yet
- Marson'S: Power & Distribution TransformerDocument9 pagesMarson'S: Power & Distribution TransformerMind of BeautyNo ratings yet
- Application of The IEEE Guide For Improving The Lightning Performance of Electric Overhead Distribution Lines STD 1410-1997Document10 pagesApplication of The IEEE Guide For Improving The Lightning Performance of Electric Overhead Distribution Lines STD 1410-1997Carlos AvilaNo ratings yet
- Understanding Three Phase ReactorsDocument16 pagesUnderstanding Three Phase ReactorsMind of BeautyNo ratings yet
- SS440 InstructionsDocument4 pagesSS440 Instructionsgurunathan14No ratings yet
- Gems Stones PoojasDocument10 pagesGems Stones PoojasMind of BeautyNo ratings yet
- Toshiba Medium Voltage Motor SolutionsDocument6 pagesToshiba Medium Voltage Motor Solutionsحازم صبحى100% (1)
- Motor Connection DiagramsDocument4 pagesMotor Connection DiagramsMind of BeautyNo ratings yet
- Avr8 DataDocument4 pagesAvr8 Datagurunathan14No ratings yet
- Current Transformer SaturationDocument34 pagesCurrent Transformer SaturationDev SwainNo ratings yet
- K Factor Calculation 5787Document2 pagesK Factor Calculation 5787Aamir AliNo ratings yet
- How To Witness Test A TransformerDocument3 pagesHow To Witness Test A TransformerMind of Beauty100% (1)
- Newage Sx440 Automatic Voltage RegulatorDocument4 pagesNewage Sx440 Automatic Voltage Regulatorsantofrty100% (3)
- Nixie Clock Instruction Manual Rev 4 V41Document40 pagesNixie Clock Instruction Manual Rev 4 V41Hel VirostaNo ratings yet
- BT151 500R PDFDocument11 pagesBT151 500R PDFKristell SolisNo ratings yet
- Simple Fire Alarm CircuitDocument2 pagesSimple Fire Alarm CircuitReneo Remigoso50% (2)
- 01097GB Series 076Document4 pages01097GB Series 076Han LinNo ratings yet
- Service Manual SMT-190DNDocument79 pagesService Manual SMT-190DNEzequiel Milá de la RocaNo ratings yet
- 2M219 Etc PDFDocument4 pages2M219 Etc PDFlicorneblackNo ratings yet
- Quantitative Research For ACADDocument36 pagesQuantitative Research For ACADPeterClomaJr.No ratings yet
- SMA Energy Meter MinDocument2 pagesSMA Energy Meter Minkhal manNo ratings yet
- Siemens MotorDocument80 pagesSiemens MotorZohaibNo ratings yet
- Glare Free HeadlightsDocument20 pagesGlare Free HeadlightsKiran ThunuguntlaNo ratings yet
- CET Datasheet Enclosure Systems 48Vdc-120VacDocument5 pagesCET Datasheet Enclosure Systems 48Vdc-120VacAlejandro Garcia MNo ratings yet
- Datasheet NARADA 12NDF155 PDFDocument2 pagesDatasheet NARADA 12NDF155 PDFDavid Esteban100% (1)
- Chapter 5 SolutionDocument4 pagesChapter 5 Solutionravi474No ratings yet
- Sony CDP CX220 Service ManualDocument52 pagesSony CDP CX220 Service ManualCitizen sevenNo ratings yet
- HVAC Elect. Plu Fire BOQ - Podium-3 R-1Document14 pagesHVAC Elect. Plu Fire BOQ - Podium-3 R-1Jawed KhanNo ratings yet
- IMN Installation ManualDocument136 pagesIMN Installation Manualivan.liepalNo ratings yet
- Silicon NPN Triple Diffusion Planar Type: Power TransistorsDocument3 pagesSilicon NPN Triple Diffusion Planar Type: Power TransistorsNicolás CastroNo ratings yet
- JDS6600 Quick GuideDocument11 pagesJDS6600 Quick Guideadriano50% (2)
- Circuit Protection and Control Devices From 0.5 To 6300A - 2009Document72 pagesCircuit Protection and Control Devices From 0.5 To 6300A - 2009Strato VariusNo ratings yet
- Chapter 1 - Automotive Electrical SystemDocument58 pagesChapter 1 - Automotive Electrical SystemAnonymous heli1UyLNo ratings yet
- 200 A Loadbreak Connectors: 25 KV Posi-Break Elbow and CapDocument19 pages200 A Loadbreak Connectors: 25 KV Posi-Break Elbow and CapCARHUAMACA PASCUAL mhNo ratings yet
- Emergency Generator Sizing and Motor Starting Analysis: Mukesh Kumar Kirar, Ganga AgnihotriDocument6 pagesEmergency Generator Sizing and Motor Starting Analysis: Mukesh Kumar Kirar, Ganga Agnihotribalwant_negi7520No ratings yet
- History of Electronics: February 2016Document10 pagesHistory of Electronics: February 2016Honte GoNo ratings yet
- Lithium Ion Battery Pack 48 Volts /120 AhDocument3 pagesLithium Ion Battery Pack 48 Volts /120 AhSai PrashanthNo ratings yet
- KBL12400Document2 pagesKBL12400Manuel Diaz GuzmanNo ratings yet
- IEEEStd519 1992HarmonicLimits PDFDocument10 pagesIEEEStd519 1992HarmonicLimits PDFareina7No ratings yet
- Coefficient of CouplingDocument5 pagesCoefficient of Couplingeimc2No ratings yet
- Fisher & Paykel Washer Fault CodesDocument21 pagesFisher & Paykel Washer Fault CodesRichard RothNo ratings yet
- Aditya High Vacuum PVT LTD: POSITIONS (QW-405) GAS (QW-408)Document1 pageAditya High Vacuum PVT LTD: POSITIONS (QW-405) GAS (QW-408)Anand MakasanaNo ratings yet