You might also like
- Uas International Project ReportDocument68 pagesUas International Project Reportayushi biswas50% (2)
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationFrom EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationNo ratings yet
- Ultrasound ImagingDocument103 pagesUltrasound Imagingsolomong100% (1)
- Double Frequency Buck ConverterDocument68 pagesDouble Frequency Buck ConverterSanthosh GuduruNo ratings yet
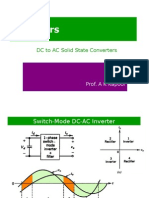
- DC - Ac Inv.Document82 pagesDC - Ac Inv.Jegadeeswari GNo ratings yet
- Digital Control Engineering Chapter 1Document8 pagesDigital Control Engineering Chapter 1Ishmayne Shawarrma100% (1)
- Buck ConvertersDocument15 pagesBuck Convertersmuddassir07100% (2)
- Buck Converter Using ArduinoDocument12 pagesBuck Converter Using ArduinoaaqibNo ratings yet
- Chopper DC To DC ConverterDocument37 pagesChopper DC To DC ConverterGautam Kumar100% (1)
- Sepic Converter Based DC Motor Speed ControlDocument18 pagesSepic Converter Based DC Motor Speed ControlCrispNo ratings yet
- Course Plan-Power ElectronicsDocument5 pagesCourse Plan-Power ElectronicsNarasimman DonNo ratings yet
- DC DC Converters (Lecture#03)Document40 pagesDC DC Converters (Lecture#03)usmangul_23No ratings yet
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Document51 pagesProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNo ratings yet
- Study and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationDocument17 pagesStudy and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationIOSRjournalNo ratings yet
- Slides For Multi Level Inverter in Psim PDFDocument41 pagesSlides For Multi Level Inverter in Psim PDFmuhammad saeedNo ratings yet
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocument5 pagesBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNo ratings yet
- 16 Unit15Document45 pages16 Unit15ZULUNo ratings yet
- Master Thesis - Observer Based Fault Detection in DC-DC Power Converter - Levin - KieranDocument97 pagesMaster Thesis - Observer Based Fault Detection in DC-DC Power Converter - Levin - KieranhieuhuechNo ratings yet
- SPWMDocument30 pagesSPWMRicky LesmanaNo ratings yet
- Voltage Source InverterDocument77 pagesVoltage Source InverterSaied Aly SalamahNo ratings yet
- DC AC InvertorDocument61 pagesDC AC InvertorPaul TodericNo ratings yet
- DC To AC InverterDocument5 pagesDC To AC InverterRexy RamadhanNo ratings yet
- Implementation of Space Vector Pulse Width Modulation (SVPWM) For Three Phase Voltage Source Inverter Using Matlab Simulink - 24 PagesDocument24 pagesImplementation of Space Vector Pulse Width Modulation (SVPWM) For Three Phase Voltage Source Inverter Using Matlab Simulink - 24 PagesMohamed Nabil100% (1)
- Arduino SPWM Sine InverterDocument5 pagesArduino SPWM Sine InvertermaurilioctbaNo ratings yet
- Boost DesignDocument4 pagesBoost DesignmuthukumartharaniNo ratings yet
- Analysis of Power Electronics ConvertesDocument1 pageAnalysis of Power Electronics Convertesksurya136No ratings yet
- 3 Line ConverterDocument10 pages3 Line ConverterJay Romar PabianiaNo ratings yet
- Half-Bridge Bidirectional DC-DC Converter For Small Electric VehicleDocument5 pagesHalf-Bridge Bidirectional DC-DC Converter For Small Electric VehiclePradeepChandraVarmaMandapati100% (1)
- Documentation of PMSMDocument89 pagesDocumentation of PMSM07be1a0213No ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- Chapter 1 DC Drives Part1Document46 pagesChapter 1 DC Drives Part1Mohammad MunzirNo ratings yet
- DC Link CurrentDocument8 pagesDC Link CurrentsubbannaNo ratings yet
- Generation of High Voltage DC Using Diodes & Capacitors in Ladder NetworkDocument6 pagesGeneration of High Voltage DC Using Diodes & Capacitors in Ladder NetworkEditor IJRITCCNo ratings yet
- Tms 320 F 28379 DDocument222 pagesTms 320 F 28379 DJuan Ku LosanoNo ratings yet
- 3 Phase Cascaded H-Bridge InverterDocument7 pages3 Phase Cascaded H-Bridge InverterAnil ShahNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- AT89C51Document15 pagesAT89C51vaalginNo ratings yet
- 1 - ELEC3204 - 01 - IntroductionDocument51 pages1 - ELEC3204 - 01 - IntroductionDavid Young100% (1)
- ME Week 9 WaveguidesDocument33 pagesME Week 9 WaveguidesSaad NadeemNo ratings yet
- Ee 1403 Solid State DrivesDocument14 pagesEe 1403 Solid State DrivesPanchi AgrawalNo ratings yet
- Ee 328 Lecture 11Document55 pagesEe 328 Lecture 11somethingfornowNo ratings yet
- InvertersDocument35 pagesInvertersyashtNo ratings yet
- Power Electronic Inverter - ReportDocument9 pagesPower Electronic Inverter - ReportPrateek AgarwalNo ratings yet
- Control Relay With ArduinoDocument5 pagesControl Relay With ArduinoMallikarjun RaoNo ratings yet
- What Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?Document14 pagesWhat Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?BALAJINo ratings yet
- Module-2 - Phase Controlled RectifierDocument80 pagesModule-2 - Phase Controlled RectifieruttamNo ratings yet
- Industrial Electronics 1st ExamDocument34 pagesIndustrial Electronics 1st ExamJomar Bonje100% (1)
- Ferrite Core Transformer Design Engineering and Technology 6Document10 pagesFerrite Core Transformer Design Engineering and Technology 6nedian_2006100% (1)
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor life100% (1)
- Solar-Powered Battery Charging With Highly Efficient Buck ConverterDocument20 pagesSolar-Powered Battery Charging With Highly Efficient Buck ConverterSusanNo ratings yet
- Frequency To Voltage Converter ReportDocument5 pagesFrequency To Voltage Converter ReportEssa SiddiquiNo ratings yet
- On AC Voltage ControllersDocument25 pagesOn AC Voltage ControllersSahil ChoudharyNo ratings yet
- 02 Uncontrolled AC To DC Converters3Document46 pages02 Uncontrolled AC To DC Converters3siegfred sicatNo ratings yet
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersFrom EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersNo ratings yet
- SpaceVector PWM InverteDocument27 pagesSpaceVector PWM InverteShoaib KhizerNo ratings yet
- Novel, Switch, Z-Source Three-Phase InverterDocument6 pagesNovel, Switch, Z-Source Three-Phase InverterJanjanam PraveenNo ratings yet
- SVPWMDocument24 pagesSVPWMIndrajithSrNo ratings yet
- Space Vector ControlDocument21 pagesSpace Vector ControlPoras KhetarpalNo ratings yet
- Implantable Technology: History, Controversies, and Social ImplicationsDocument11 pagesImplantable Technology: History, Controversies, and Social ImplicationssolomongNo ratings yet
- IntroductionDocument34 pagesIntroductionsolomongNo ratings yet
- Computed TomographyDocument86 pagesComputed TomographysolomongNo ratings yet
- Computed TomographyDocument86 pagesComputed TomographysolomongNo ratings yet
- Chapter 6 State Space AnalysisDocument41 pagesChapter 6 State Space AnalysissolomongNo ratings yet
- Thermocouple Reference TemperaturesDocument13 pagesThermocouple Reference TemperaturessolomongNo ratings yet
- Chapter 6 State Space AnalysisDocument31 pagesChapter 6 State Space AnalysissolomongNo ratings yet
- Performance Characteristics of Measurement SystemDocument56 pagesPerformance Characteristics of Measurement SystemsolomongNo ratings yet
- Building A Quadrature Optic SimplifiedDocument5 pagesBuilding A Quadrature Optic SimplifiedLanteanNo ratings yet
- Guide To Hacking With Sub7Document2 pagesGuide To Hacking With Sub7ReeGast BenedictNo ratings yet
- 1.covering MaybankDocument1 page1.covering MaybankNgan ThaoNo ratings yet
- Design and Implementation of Multilangua PDFDocument77 pagesDesign and Implementation of Multilangua PDFMei XingNo ratings yet
- Mckinlay, Black DogDocument17 pagesMckinlay, Black DogalexiselisandroNo ratings yet
- Student Worksheet 1 Instruction: Analyse The Following Cover Letters Based On The Structure and Content!Document2 pagesStudent Worksheet 1 Instruction: Analyse The Following Cover Letters Based On The Structure and Content!Landro SinagaNo ratings yet
- Syllabus PDFDocument7 pagesSyllabus PDFJoshua MockNo ratings yet
- 1-1 Introduction To SustainabilityDocument22 pages1-1 Introduction To SustainabilityjessewalterNo ratings yet
- Project 2Document20 pagesProject 2M.Talha TariqNo ratings yet
- Steuerbuch2022 en v03 BarrierefreiDocument204 pagesSteuerbuch2022 en v03 BarrierefreilaescuderoNo ratings yet
- Jockey PumpDocument5 pagesJockey PumpBrandon LeonardNo ratings yet
- What Are Collocations Sandy Beaches or False TeethDocument16 pagesWhat Are Collocations Sandy Beaches or False TeethCennet EkiciNo ratings yet
- Digitising European IndustryDocument18 pagesDigitising European IndustrypapanikoNo ratings yet
- 998-20256927 2019 Line Card GMDocument2 pages998-20256927 2019 Line Card GMIMRANNo ratings yet
- Task 2 Number OkDocument12 pagesTask 2 Number OkCutAtikaHasyaNo ratings yet
- Disarmament DiplomacyDocument55 pagesDisarmament DiplomacygoricaaaPNo ratings yet
- 2022 2023 Bible Reading Plan Friendship Baptist Church 22Document2 pages2022 2023 Bible Reading Plan Friendship Baptist Church 22api-334614348No ratings yet
- ReportDocument3 pagesReportAnshuman Pratap Singh ChauhanNo ratings yet
- Sp2019 CS509 Exercise Sheet 2Document5 pagesSp2019 CS509 Exercise Sheet 2fakhruldeenNo ratings yet
- Archicad 21 LeporelloDocument14 pagesArchicad 21 LeporelloLeslie Colina - YeyeNo ratings yet
- C411 Agile Fiber Shelves 860647710 Jan 19Document14 pagesC411 Agile Fiber Shelves 860647710 Jan 19NancyNo ratings yet
- Gods and Goddesses of HinduismDocument3 pagesGods and Goddesses of HinduismZero TwoNo ratings yet
- 10 Fitness Social Media Influencers You Should Follow For MotivationDocument3 pages10 Fitness Social Media Influencers You Should Follow For MotivationJulia Marie ReformaNo ratings yet
- Waterside SafetyDocument36 pagesWaterside SafetyRoy Dela CruiseNo ratings yet
- NSTP Disaster PreparednessDocument9 pagesNSTP Disaster PreparednessGabrielle Andrea GuzmanNo ratings yet
- Candidate'S Declaration: Abdulbari B. Tech (Eee) V SemDocument8 pagesCandidate'S Declaration: Abdulbari B. Tech (Eee) V Sem9897856218No ratings yet
- Soal Paket C Kelas Xii PKBM AnnoorDocument6 pagesSoal Paket C Kelas Xii PKBM AnnoorAnggitPalupiUtomoNo ratings yet
- RECOM Initiative Voice-No.20-2015Document40 pagesRECOM Initiative Voice-No.20-2015KoalicijazaREKOMNo ratings yet
- Norman FosterDocument22 pagesNorman FosterPrashant ChavanNo ratings yet
- Onkyo W800BT Leaflet BlackDocument2 pagesOnkyo W800BT Leaflet Blackmttw010No ratings yet