You might also like
- Data Structures in SwiftDocument41 pagesData Structures in SwiftArav Singh100% (1)
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Estimation of ECG Features Using LabVIEW PDFDocument5 pagesEstimation of ECG Features Using LabVIEW PDFAstrid LovaszNo ratings yet
- Control Theory Quiz 1Document5 pagesControl Theory Quiz 1Sundas Khalid100% (1)
- Industry 4.0 Implementation For MultinationalsDocument40 pagesIndustry 4.0 Implementation For MultinationalsFleet100% (1)
- Assignment 3Document3 pagesAssignment 3sethyashis456No ratings yet
- MAT565 - Tutorial - Inverse LaplaceDocument2 pagesMAT565 - Tutorial - Inverse LaplacefaqhrulNo ratings yet
- Chapter 4 Time Response of Dynamic Systems 1Document86 pagesChapter 4 Time Response of Dynamic Systems 1Rakhmeen gulNo ratings yet
- Unit 1 Laplace Transforms 2marksDocument5 pagesUnit 1 Laplace Transforms 2marksSudersan BalajiNo ratings yet
- Block DiagramDocument11 pagesBlock DiagramRilwanNo ratings yet
- Stability: Solutions To Case Studies ChallengesDocument50 pagesStability: Solutions To Case Studies Challenges廖偉丞No ratings yet
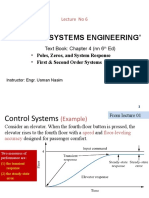
- Lecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsDocument30 pagesLecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsAhmad RazaNo ratings yet
- Assignment 1 SolutionDocument11 pagesAssignment 1 SolutionKash TorabiNo ratings yet
- Mathcad - 2019 Dynamic Analysis of Multistories Shear BuildingDocument8 pagesMathcad - 2019 Dynamic Analysis of Multistories Shear Buildingsoru soruNo ratings yet
- Notes On Control Systems 05Document11 pagesNotes On Control Systems 05Yazdan RastegarNo ratings yet
- 12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsDocument30 pages12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsHamza KhanNo ratings yet
- Sri Chaitanya IIT Academy, India: KEY Sheet PhysicsDocument6 pagesSri Chaitanya IIT Academy, India: KEY Sheet PhysicsO SNo ratings yet
- UEE407 Tutsheets 7-8 PDFDocument2 pagesUEE407 Tutsheets 7-8 PDFPrashantNo ratings yet
- StateDocument2 pagesStateKAPU SANTHOSH REDDY 2021-CSEUG BATCHNo ratings yet
- 117920Document20 pages117920saravanan.9344308178No ratings yet
- Lecture 13 Signal Flow Graphs and Mason, S RuleDocument27 pagesLecture 13 Signal Flow Graphs and Mason, S RuleHamza KhanNo ratings yet
- Chapter 1 Formation of Network MatricesDocument37 pagesChapter 1 Formation of Network MatricesRishabhNo ratings yet
- 1 SR Star Jee Main GTM 02 - 03 01 2024 KeyDocument14 pages1 SR Star Jee Main GTM 02 - 03 01 2024 Keyjahnavimogarala9No ratings yet
- Lex 3Document11 pagesLex 3Amir MahmoodNo ratings yet
- Assignment Laplace TransformDocument2 pagesAssignment Laplace TransformSatvik YelluriNo ratings yet
- 13 ShortestPathDocument63 pages13 ShortestPathAhmad Zia YaqoobiNo ratings yet
- Ecuaciones Diferenciales Con Priblemas Con Valores en La Frintera 7a Edición - Dennis ZillDocument3 pagesEcuaciones Diferenciales Con Priblemas Con Valores en La Frintera 7a Edición - Dennis Zilljonathan r jNo ratings yet
- Lecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsDocument30 pagesLecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsMuhammad Abdullah MeharNo ratings yet
- Mechanics of Fluids 5th Edition Potter Solutions Manual DownloadDocument40 pagesMechanics of Fluids 5th Edition Potter Solutions Manual DownloadElizabeth SpenceNo ratings yet
- CSN-221 Pipelines-Quiz: Enrollment No.: 18114031 Name - Hemil PanchiwalaDocument6 pagesCSN-221 Pipelines-Quiz: Enrollment No.: 18114031 Name - Hemil PanchiwalaBlack ReaperNo ratings yet
- Analysis and Comparison of Universal Biquad Structures: Tomina SALAJAN, Raul ONET, Marius NEAG, Marina TOPADocument8 pagesAnalysis and Comparison of Universal Biquad Structures: Tomina SALAJAN, Raul ONET, Marius NEAG, Marina TOPATomina FabiolaNo ratings yet
- workshop-COM & WEP-SM - 24-09-20 - ANSWER KEYDocument1 pageworkshop-COM & WEP-SM - 24-09-20 - ANSWER KEYAkashdeep Singh Ninth 'A'30No ratings yet
- Experiment:: Free Fall Experiment (Fence)Document12 pagesExperiment:: Free Fall Experiment (Fence)LESO IndustrialNo ratings yet
- MAT231BT - Inverse Laplace TransformsDocument12 pagesMAT231BT - Inverse Laplace TransformsRochakNo ratings yet
- Narayana 09-06-2022 - Outgoing SR - Jee Main Model Gtm-7 - SolDocument16 pagesNarayana 09-06-2022 - Outgoing SR - Jee Main Model Gtm-7 - SolYuva AkhilNo ratings yet
- CEMECHQP2Document2 pagesCEMECHQP2srikanthNo ratings yet
- Analysis and Comparison of Universal GMC Biquad StructuresDocument6 pagesAnalysis and Comparison of Universal GMC Biquad StructuresTomina FabiolaNo ratings yet
- Lecture (1) MVCSDocument21 pagesLecture (1) MVCSTelal MohammedNo ratings yet
- Metrado de TuberiasDocument6 pagesMetrado de TuberiasJhan VeikerNo ratings yet
- Final Exam - 2014Document5 pagesFinal Exam - 2014zaidNo ratings yet
- 2024-JEE Advanced Full Test-1 - Paper-1 - Solutions PDFDocument18 pages2024-JEE Advanced Full Test-1 - Paper-1 - Solutions PDFSamNo ratings yet
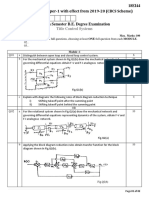
- 18EI44 Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)Document3 pages18EI44 Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)Mohammed Shakeel khudusNo ratings yet
- DX71 04G MultifactorRSM CatDocument13 pagesDX71 04G MultifactorRSM CatGrecia UgarteNo ratings yet
- Root Locus Diagram: Upon Completion of This Chapter You Will Be Able ToDocument24 pagesRoot Locus Diagram: Upon Completion of This Chapter You Will Be Able ToGnanendraReddyNo ratings yet
- Quiz2 Review Sol PDFDocument38 pagesQuiz2 Review Sol PDFHwinner YitinaNo ratings yet
- 1.3-1.4 Test Review: Convert Each Degree Measure Into Radians and Each Radian Measure Into DegreesDocument2 pages1.3-1.4 Test Review: Convert Each Degree Measure Into Radians and Each Radian Measure Into DegreesheyyyaleNo ratings yet
- Mcv4u CH 5 Nelson SolutionsDocument98 pagesMcv4u CH 5 Nelson SolutionsStephanieNo ratings yet
- Home Assignments #3Document2 pagesHome Assignments #3Pham Thanh0% (1)
- Icrics17 143Document7 pagesIcrics17 143S. Alagu I.T -Assistant professorNo ratings yet
- Artificial Intelligence: State Space Heuristic Function (Goal State: G)Document7 pagesArtificial Intelligence: State Space Heuristic Function (Goal State: G)TryerNo ratings yet
- Materials Science EngineeringDocument182 pagesMaterials Science EngineeringSaravananNandhuNo ratings yet
- MC Ex09 NotesDocument23 pagesMC Ex09 NotesCoping ForeverNo ratings yet
- 17 03 2024 SR Super60 Elite, Target & LIIT BTs Jee MainDocument14 pages17 03 2024 SR Super60 Elite, Target & LIIT BTs Jee MainTerish charan tej ImmidisettiNo ratings yet
- B 800 C 0113Document2 pagesB 800 C 0113X'mix ĐreamerNo ratings yet
- Chapter 06 - Cam DesignDocument55 pagesChapter 06 - Cam Designyash shrivastavaNo ratings yet
- CONTROL SYSTEMS Set - 2 PDFDocument10 pagesCONTROL SYSTEMS Set - 2 PDFSanthosh KumarNo ratings yet
- Tutorial 3 - Time Response PDFDocument3 pagesTutorial 3 - Time Response PDFAmylia NatashaNo ratings yet
- Control: Hooman SamaniDocument43 pagesControl: Hooman SamaniGonzales PhanieNo ratings yet
- Tugas Analisis KuantitatifDocument12 pagesTugas Analisis KuantitatifDoni Palguna 565No ratings yet
- Skill ProblemsDocument4 pagesSkill ProblemssethuraghulNo ratings yet
- Exercise - Laplace TransformDocument2 pagesExercise - Laplace Transformzul hilmiNo ratings yet
- 4LOGARITHMS (Equalities and Inequalities) UpdatedDocument146 pages4LOGARITHMS (Equalities and Inequalities) UpdatedNikhil Raj PandianNo ratings yet
- Sheet#6Document1 pageSheet#6Hossam AhmedNo ratings yet
- Clil Project DraftDocument5 pagesClil Project DraftFleetNo ratings yet
- Arduino Passive Buzzer Float Language Noise: Luis García - Inglés 5 Ingeniería - ClilDocument1 pageArduino Passive Buzzer Float Language Noise: Luis García - Inglés 5 Ingeniería - ClilFleetNo ratings yet
- Industry 4.0 and Digital Manufacturing: A Design Method Applying Reverse EngineeringDocument23 pagesIndustry 4.0 and Digital Manufacturing: A Design Method Applying Reverse EngineeringFleetNo ratings yet
- Recent Advances and Trends of Cyber-Physical and Big DataDocument7 pagesRecent Advances and Trends of Cyber-Physical and Big DataFleetNo ratings yet
- A Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingDocument22 pagesA Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingFleetNo ratings yet
- CryptDocument1 pageCryptFleetNo ratings yet
- Heaps and Priority Queues 1Document25 pagesHeaps and Priority Queues 1ababbaNo ratings yet
- Cyrus BeckDocument32 pagesCyrus BeckLaraib RasheedNo ratings yet
- IJTC201604001-Restoration of Image Using KNN AlgorithmDocument6 pagesIJTC201604001-Restoration of Image Using KNN AlgorithmInternational Journal of Technology and Computing (IJTC)No ratings yet
- Support Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaDocument8 pagesSupport Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaAmish SharmaNo ratings yet
- Ho CH 5 Codes MarmolDocument2 pagesHo CH 5 Codes MarmolGina Marmol0% (1)
- Module-3 2Document40 pagesModule-3 2Sruthi GNo ratings yet
- ObjectiveDocument22 pagesObjectiveKoratala HarshaNo ratings yet
- EE3101 - 7 Chapter 4-1 Error Correction Coding - r1Document28 pagesEE3101 - 7 Chapter 4-1 Error Correction Coding - r1fishkantNo ratings yet
- Maxim01b Tutorial AN1080 Understanding SAR ADCs - Their Architecture and Comparison With Other ADCsDocument7 pagesMaxim01b Tutorial AN1080 Understanding SAR ADCs - Their Architecture and Comparison With Other ADCsektawhatsisNo ratings yet
- 3.4 Linear ProgrammingDocument18 pages3.4 Linear ProgrammingIsmail KhanNo ratings yet
- Chapter 6 - Distribution and Network Models: Cengage Learning Testing, Powered by CogneroDocument29 pagesChapter 6 - Distribution and Network Models: Cengage Learning Testing, Powered by CogneroFaye Cecil Posadas CuramingNo ratings yet
- Sensor Fusion Engineer Nanodegree SyllabusDocument6 pagesSensor Fusion Engineer Nanodegree SyllabusIsaac Kuma YeboahNo ratings yet
- AI Manual (E-Next - In)Document57 pagesAI Manual (E-Next - In)SohailNo ratings yet
- Vol2 Endc PDFDocument272 pagesVol2 Endc PDFMajjari vijayaRaghavaNo ratings yet
- Signals & Systems (Common To Ec/Tc/It/Bm/Ml)Document5 pagesSignals & Systems (Common To Ec/Tc/It/Bm/Ml)sureshfm1No ratings yet
- Authentication Functions and Hash FunctionsDocument54 pagesAuthentication Functions and Hash FunctionsTejasNo ratings yet
- Latihan 1 POM-QMDocument2 pagesLatihan 1 POM-QMYanSinagaNo ratings yet
- Digital Communication Systems by Simon Haykin-112Document6 pagesDigital Communication Systems by Simon Haykin-112matildaNo ratings yet
- OptQuest OptimizationDocument28 pagesOptQuest OptimizationMano KanthanathanNo ratings yet
- 2019 ISCAS Reconfigurable Radix-2k3 Feedforward FFT ArchitecturesDocument5 pages2019 ISCAS Reconfigurable Radix-2k3 Feedforward FFT ArchitecturesTsukasa BerryNo ratings yet
- DalgorithmDocument5 pagesDalgorithmAnteneh bezahNo ratings yet
- A Rank-Order Distance Based Clustering Algorithm For Face TaggingDocument8 pagesA Rank-Order Distance Based Clustering Algorithm For Face Tagging.adtmmalNo ratings yet
- Tutorial 7.1Document6 pagesTutorial 7.1Ercherio MarpaungNo ratings yet
- 1 BUSI4489 Management Science For Decision Support Assignment 1Document2 pages1 BUSI4489 Management Science For Decision Support Assignment 1Joseph MainaNo ratings yet
- 21cmba21-Quantitative Techniques - Mba (General) Question BankDocument23 pages21cmba21-Quantitative Techniques - Mba (General) Question BankHari Sesha PriyaaNo ratings yet
- Extended Hamming Code PDFDocument2 pagesExtended Hamming Code PDFKimNo ratings yet
- Name: Sanket Rahangdale REG No.: 19010855 ROLL No: B-171: Practical-2Document11 pagesName: Sanket Rahangdale REG No.: 19010855 ROLL No: B-171: Practical-2MR. SANKET RAHANGDALENo ratings yet
- CS502 GQ DEC 2020, MCS of VirtualliansDocument41 pagesCS502 GQ DEC 2020, MCS of VirtualliansCh HamXa Aziz (HeMi)100% (1)