You might also like
- 313 Chapter 5Document1 page313 Chapter 5seamesbNo ratings yet
- Week4 Head Loss Minor LossDocument40 pagesWeek4 Head Loss Minor Losselif sNo ratings yet
- Rigid RotorDocument38 pagesRigid RotorRaniaNo ratings yet
- Trial Perlis P1Document19 pagesTrial Perlis P1abNo ratings yet
- Classical Model of Rigid RotorDocument38 pagesClassical Model of Rigid RotorSergeyNo ratings yet
- Harmonic Motion EquationsDocument1 pageHarmonic Motion EquationsWaceed HowNo ratings yet
- Strain Gages: Hambatan Kawat Perubahan Hambatan KawatDocument8 pagesStrain Gages: Hambatan Kawat Perubahan Hambatan KawatOcta RioNo ratings yet
- BeamDocument86 pagesBeamprempragupta123No ratings yet
- RM3 Liquids in Relative Equilibrium Rotation 1Document23 pagesRM3 Liquids in Relative Equilibrium Rotation 1EmmanNo ratings yet
- (8032) DPP Gravitation eDocument6 pages(8032) DPP Gravitation eIshaan TandonNo ratings yet
- General Review Note Sep 7, 2023Document6 pagesGeneral Review Note Sep 7, 2023Ridhima SinghalNo ratings yet
- A Complete List of All The Formulas Needed For The Exam Strength of Materials 1Document4 pagesA Complete List of All The Formulas Needed For The Exam Strength of Materials 1Prakash BudhaNo ratings yet
- S6 Revision For Pure Mathematics Allow Me To Discuss This Dozen of Questions With YouDocument7 pagesS6 Revision For Pure Mathematics Allow Me To Discuss This Dozen of Questions With Youkaziba stephenNo ratings yet
- List of All The Formulas Needed For The Exam Strength of Materials 1 PDFDocument4 pagesList of All The Formulas Needed For The Exam Strength of Materials 1 PDFPrakash BudhaNo ratings yet
- Lecture4 Ch2-3 Waves EMwavesDocument23 pagesLecture4 Ch2-3 Waves EMwavesjonny.platters34No ratings yet
- Formulario 1° ParcialDocument1 pageFormulario 1° ParcialFernandaNo ratings yet
- Solid Mechanics ME 212 - Week 13Document9 pagesSolid Mechanics ME 212 - Week 13Mihir Kumar MechNo ratings yet
- Mech of Solids 1 Formula SheetDocument2 pagesMech of Solids 1 Formula SheetJames Joe . WoonNo ratings yet
- U22295 Exam Equations SheetDocument3 pagesU22295 Exam Equations SheetNicholas O'CallaghanNo ratings yet
- Formular 154Document1 pageFormular 154พิมพ์ โพธิสัตว์No ratings yet
- Plane Wave Propagation and Transmission Line TheoryDocument6 pagesPlane Wave Propagation and Transmission Line Theoryunity123d deewNo ratings yet
- KGH Xs GH KGH CE GH KGH: Mech / Elec Analogy Nyquist Criteria State - SpaceDocument1 pageKGH Xs GH KGH CE GH KGH: Mech / Elec Analogy Nyquist Criteria State - Spacejohn dongNo ratings yet
- Experimental Studies of QCD 1. Elements of QCD 2. Tests of QCD in Annihilation 3. Studies of QCD in DIS 4. QCD in CollisionsDocument7 pagesExperimental Studies of QCD 1. Elements of QCD 2. Tests of QCD in Annihilation 3. Studies of QCD in DIS 4. QCD in Collisionscifarha venantNo ratings yet
- 2019-SOL-APA-2B - Liquids, POM, Thermodynamics, SHM, WavesDocument12 pages2019-SOL-APA-2B - Liquids, POM, Thermodynamics, SHM, WavesHemendra PrasannaNo ratings yet
- II. Summary of Formulas: Fundamental Concepts Static EquilibriumDocument5 pagesII. Summary of Formulas: Fundamental Concepts Static EquilibriumvolaNo ratings yet
- Major Projet Semiar-01Document12 pagesMajor Projet Semiar-01Mukesh PandaNo ratings yet
- Chapter 11Document9 pagesChapter 11Nagamani NunavathNo ratings yet
- Effects of self-consistence violations in HF based RPA calculationsDocument25 pagesEffects of self-consistence violations in HF based RPA calculationsManimalar MuthuvelNo ratings yet
- Beams, Frames and Torsion Elements - March2020Document22 pagesBeams, Frames and Torsion Elements - March2020Dr P Ravinder ReddyNo ratings yet
- Reservoir Seismic 6Document57 pagesReservoir Seismic 6Humbang PurbaNo ratings yet
- Equations for Heat Transfer v1p2 191014Document8 pagesEquations for Heat Transfer v1p2 191014rlekmineNo ratings yet
- XterminationR1a 3Document35 pagesXterminationR1a 3api-3740051No ratings yet
- Electromagnetic and particle data memoDocument14 pagesElectromagnetic and particle data memoBlazsNo ratings yet
- ME213 Mechanics of Materials Formula SheetDocument3 pagesME213 Mechanics of Materials Formula SheetAishwaryShuklaNo ratings yet
- SPH3U Formula Sheet Fall 2020 1 PDFDocument2 pagesSPH3U Formula Sheet Fall 2020 1 PDFUzmaNo ratings yet
- Formulae PDFDocument2 pagesFormulae PDFMaisarah Hanani Shah IINo ratings yet
- Torque On A Dipole: F R F RDocument16 pagesTorque On A Dipole: F R F RÁkhïl VãlupådäsùNo ratings yet
- Chapter 4Document39 pagesChapter 4priyadarshaniblsNo ratings yet
- Damped Free Oscillations Forced ForcedDocument67 pagesDamped Free Oscillations Forced Forcednabin PaudelNo ratings yet
- Machinery Dynamics Impedance DefinitionDocument5 pagesMachinery Dynamics Impedance DefinitionFatima NusserNo ratings yet
- Advance Mechanics of SolidsDocument6 pagesAdvance Mechanics of SolidsyagneshNo ratings yet
- U2-Sunday Bloody Sunday PDFDocument8 pagesU2-Sunday Bloody Sunday PDFlaurent zulloNo ratings yet
- Maximum and Minimum in Plane Principal StressesDocument8 pagesMaximum and Minimum in Plane Principal StressesFaryal BatoolNo ratings yet
- Moment of Inertia CalculationsDocument32 pagesMoment of Inertia CalculationsG Gfr YMaNo ratings yet
- Deformation of A Beam Under Transverse Loading: EI X M)Document25 pagesDeformation of A Beam Under Transverse Loading: EI X M)DhiyaUlhaqZhorifCavellNo ratings yet
- Form AstroDocument2 pagesForm AstroVictor De Paula VilaNo ratings yet
- Mom Section 25Document8 pagesMom Section 25Hanri PakpahanNo ratings yet
- XterminationR1a 3Document35 pagesXterminationR1a 3api-3740051No ratings yet
- Mechanics of Materials Formula SheetDocument3 pagesMechanics of Materials Formula SheetSam ReyesNo ratings yet
- Formula SheetDocument3 pagesFormula SheetJohan PienaarNo ratings yet
- Autocorrelation Detection MethodsDocument36 pagesAutocorrelation Detection MethodsRadityaNo ratings yet
- D Part 74Document1 pageD Part 74Mark24_12No ratings yet
- Differential Calculus Higher MathematicsDocument31 pagesDifferential Calculus Higher MathematicsBenny AgassiNo ratings yet
- V GMR: If A Planet Is Suddenly Date/C: AnswerDocument1 pageV GMR: If A Planet Is Suddenly Date/C: AnswerJack LupinoNo ratings yet
- B. QuantumTheory-2-12092023Document30 pagesB. QuantumTheory-2-12092023Parth ShahNo ratings yet
- Maxwell's Equations and Light WavesDocument23 pagesMaxwell's Equations and Light WavesSoma SarkarNo ratings yet
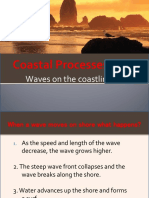
- Kuliah 13 Coastal ProcessesDocument39 pagesKuliah 13 Coastal Processesberry mirazNo ratings yet
- Tensor calculations in general relativityDocument8 pagesTensor calculations in general relativityNelson VelandiaNo ratings yet
- Geotechnical InvestigationDocument38 pagesGeotechnical InvestigationAJBAJB BAJBAJ100% (1)
- Figure 11. Dimensionless Graphs For Determining Dynamic Stiffness and Damping Coefficients ofDocument7 pagesFigure 11. Dimensionless Graphs For Determining Dynamic Stiffness and Damping Coefficients ofAJBAJB BAJBAJNo ratings yet
- Foundations For Vibrating Machines: Shamsher Prakash Vijay K. PuriDocument8 pagesFoundations For Vibrating Machines: Shamsher Prakash Vijay K. PuriAJBAJB BAJBAJNo ratings yet
- Combined Rocking and Sliding: The Problem of Combined Rocking and Sliding Is ShownDocument8 pagesCombined Rocking and Sliding: The Problem of Combined Rocking and Sliding Is ShownAJBAJB BAJBAJNo ratings yet
- MachineFoundations Part2Document8 pagesMachineFoundations Part2AJBAJB BAJBAJNo ratings yet
- Vistabrik Solid Glass Block Details Miscellaneous Interior DetailsDocument4 pagesVistabrik Solid Glass Block Details Miscellaneous Interior DetailsAJBAJB BAJBAJNo ratings yet
- Glossary of Terms: Typical Jamb Details (Document4 pagesGlossary of Terms: Typical Jamb Details (AJBAJB BAJBAJNo ratings yet
- Earthquake Resistance: Fire ResistantDocument4 pagesEarthquake Resistance: Fire ResistantAJBAJB BAJBAJNo ratings yet
- Glass Block Products: & Design InformationDocument4 pagesGlass Block Products: & Design InformationAJBAJB BAJBAJNo ratings yet
- Installed Panel Weight Non-Load Bearing Thermal Expansion Coefficient Premiere Series AND Thinline SeriesDocument4 pagesInstalled Panel Weight Non-Load Bearing Thermal Expansion Coefficient Premiere Series AND Thinline SeriesAJBAJB BAJBAJNo ratings yet
- EN Wind Code - Part1Document7 pagesEN Wind Code - Part1AJBAJB BAJBAJNo ratings yet
- EN Wind Code - Part2Document7 pagesEN Wind Code - Part2AJBAJB BAJBAJNo ratings yet
- EN 1991-1-4: Guide to wind actions standardDocument7 pagesEN 1991-1-4: Guide to wind actions standardAJBAJB BAJBAJNo ratings yet
- CB1 - Key Concepts in Biology (Paper 1 and 2)Document2 pagesCB1 - Key Concepts in Biology (Paper 1 and 2)Alhaji SowNo ratings yet
- Power Mode Selection SystemDocument3 pagesPower Mode Selection SystemOficina FernandinhoNo ratings yet
- Important Shortcuts and Mind Tricks For Simplification Questions in Aptitude Section (IBPS PO Prelims Special)Document6 pagesImportant Shortcuts and Mind Tricks For Simplification Questions in Aptitude Section (IBPS PO Prelims Special)devipreethiNo ratings yet
- FOG HORN Suppressors and Shooting AngleDocument2 pagesFOG HORN Suppressors and Shooting AngleTwobirds Flying PublicationsNo ratings yet
- RunEco EP600 Datasheet 2018Document2 pagesRunEco EP600 Datasheet 2018widnu wirasetiaNo ratings yet
- ModellingDocument10 pagesModellingAdio odunolaNo ratings yet
- Core Java - Munishwar GulatiDocument252 pagesCore Java - Munishwar Gulatimance1976No ratings yet
- MAT 214 Course Compact - 18 - 19Document3 pagesMAT 214 Course Compact - 18 - 19seyiNo ratings yet
- Vibrational Numbers (FAQ) PDFDocument4 pagesVibrational Numbers (FAQ) PDFJcpathak100% (1)
- Understanding AWS Core Services - Guided Notes - CompletedDocument42 pagesUnderstanding AWS Core Services - Guided Notes - CompletedP. ShinyNo ratings yet
- 7SG16 - Ohmega 305 Complete Technical ManualDocument117 pages7SG16 - Ohmega 305 Complete Technical Manualvivek2159No ratings yet
- ChlorantraniliproleDocument3 pagesChlorantraniliproleLaura GuarguatiNo ratings yet
- Analog Input / BTL Output Class-D Speaker AmplifierDocument17 pagesAnalog Input / BTL Output Class-D Speaker AmplifierThưởng Văn LêNo ratings yet
- Solved Probability ProblemsDocument7 pagesSolved Probability ProblemsTHEOPHILUS ATO FLETCHERNo ratings yet
- Lilo-An National High SchoolDocument3 pagesLilo-An National High SchoolJose Benavente100% (1)
- Cyclohexane Production Workshop: Introduction To Aspen PlusDocument2 pagesCyclohexane Production Workshop: Introduction To Aspen Plusnico123456789No ratings yet
- Understanding Physical Chemistry Author Dor Ben AmotzDocument35 pagesUnderstanding Physical Chemistry Author Dor Ben AmotzGintaNo ratings yet
- ISI Students' Brochure Details B.Stat. (Hons.) CurriculumDocument45 pagesISI Students' Brochure Details B.Stat. (Hons.) CurriculumDr. Mousumi BoralNo ratings yet
- TFR ExperimentDocument25 pagesTFR ExperimentSiti Norbaya100% (1)
- MVB-UART DatasheetDocument24 pagesMVB-UART DatasheetmrezafarahrazNo ratings yet
- CN 6Document14 pagesCN 6Riddhi GhogareNo ratings yet
- Heat Technology: Chapter 10 Section 4Document23 pagesHeat Technology: Chapter 10 Section 4thegedusNo ratings yet
- TM 11-6665-224-15Document113 pagesTM 11-6665-224-15SiviNo ratings yet
- Arduino LAB Manual PDFDocument25 pagesArduino LAB Manual PDFjose_mario1128100% (5)
- Innermost - Main CatalogueDocument214 pagesInnermost - Main CatalogueLiteHouseNo ratings yet
- Varisoft Eq 100 Ti c0920 CosmotecDocument3 pagesVarisoft Eq 100 Ti c0920 CosmotecHayala MotaNo ratings yet
- McqsDocument14 pagesMcqschandramohan muruganNo ratings yet
- GEN SPQ RN MSM6280 Based Firmware Release FW2.4.6 v12 F2Document32 pagesGEN SPQ RN MSM6280 Based Firmware Release FW2.4.6 v12 F2djnhh0an100% (1)
- BE Information Technology 0Document655 pagesBE Information Technology 0virendra giraseNo ratings yet
- Treumann R.a., Baum Johann W. Advanced Space Plasma Physics (WS, 1997) (ISBN 1860940269) (388s) - PPLDocument388 pagesTreumann R.a., Baum Johann W. Advanced Space Plasma Physics (WS, 1997) (ISBN 1860940269) (388s) - PPLtarwor100% (1)