You might also like
- Introduction To Photogrammetry With UAVDocument107 pagesIntroduction To Photogrammetry With UAVut4ulu100% (1)
- Object Tracking Using Color ObjectDocument12 pagesObject Tracking Using Color Objectsunil rathoreNo ratings yet
- Fundamentals of Computer GraphicsDocument39 pagesFundamentals of Computer GraphicsAyush SaxenaNo ratings yet
- Crayola Colored Pencil ChartDocument1 pageCrayola Colored Pencil ChartBridget Guildner100% (1)
- Computer Graphics Course IntroductionDocument77 pagesComputer Graphics Course IntroductionmuhibNo ratings yet
- Chapter 9. Camera Calibration and 3D ReconstructionDocument45 pagesChapter 9. Camera Calibration and 3D ReconstructionHiển Nguyễn XuânNo ratings yet
- Reverse EngineeringDocument43 pagesReverse EngineeringUser140035No ratings yet
- Kinect Like 3D Camera SlidesDocument37 pagesKinect Like 3D Camera SlidesCamilo Ernesto Pardo BeainyNo ratings yet
- 3D Image Reconstruction and Human Body Tracking Using Stereo Vision and Kinect TechnologyDocument22 pages3D Image Reconstruction and Human Body Tracking Using Stereo Vision and Kinect TechnologyRipan DeuriNo ratings yet
- Dip Lecture - Notes Final 1Document173 pagesDip Lecture - Notes Final 1Ammu AmmuNo ratings yet
- Angle of Anterior ChamberDocument55 pagesAngle of Anterior Chamberuttam prakashNo ratings yet
- Reverse EngineeringDocument45 pagesReverse Engineeringranjeet kumarNo ratings yet
- What Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureDocument63 pagesWhat Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureELADIONo ratings yet
- Chapter2 Image FormationDocument68 pagesChapter2 Image FormationGhassan HasnainNo ratings yet
- Projector Calibration PresentationDocument21 pagesProjector Calibration PresentationJosue MelongNo ratings yet
- Image Formation: - The Two Parts of The Image Formation ProcessDocument9 pagesImage Formation: - The Two Parts of The Image Formation ProcessRaaja RajaNo ratings yet
- Image Formation: - The Two Parts of The Image Formation ProcessDocument9 pagesImage Formation: - The Two Parts of The Image Formation ProcessAaqib IhrazNo ratings yet
- Structured Light: Matt Waibel COMP 290-075 4-17-2000Document18 pagesStructured Light: Matt Waibel COMP 290-075 4-17-2000Khaled Waly AhlawyNo ratings yet
- Stereoscopic PIV Educational Slide ShowDocument15 pagesStereoscopic PIV Educational Slide ShowRenika BaruahNo ratings yet
- Mechatronics: Module - ViDocument53 pagesMechatronics: Module - ViNazeema TTNo ratings yet
- Rob2 10 Camera CalibrationDocument42 pagesRob2 10 Camera CalibrationDuy Nguyễn Văn NhậtNo ratings yet
- Camera Calibration ZhengDocument42 pagesCamera Calibration Zhengmaqsoodalam20063068No ratings yet
- PSC PhotogrammetryDocument110 pagesPSC Photogrammetrysujankhanal10No ratings yet
- Tekmul 3-D Computer GraphicsDocument44 pagesTekmul 3-D Computer GraphicsFantasy CostumNo ratings yet
- Image-Based Rendering: Michael F. Cohen Microsoft ResearchDocument50 pagesImage-Based Rendering: Michael F. Cohen Microsoft ResearchSunil Shekhar NayakNo ratings yet
- Photoframmetry SupplementDocument4 pagesPhotoframmetry SupplementBreeNo ratings yet
- Artificial Intelligence (Computer Vision) : by Dr. Sehat Ullah Department of Computer Science & IT University of MalakandDocument35 pagesArtificial Intelligence (Computer Vision) : by Dr. Sehat Ullah Department of Computer Science & IT University of MalakandMuhammad UbaidNo ratings yet
- Sensor Pack SummaryDocument9 pagesSensor Pack SummaryMUHAMMAD UMARNo ratings yet
- P L S - Lecture-2Document31 pagesP L S - Lecture-2هیوا حسینNo ratings yet
- Recording and Displaying of ImagesDocument33 pagesRecording and Displaying of ImagesAmogha UpadhyayaNo ratings yet
- Presentation CCDDocument18 pagesPresentation CCDSoif AhmedNo ratings yet
- Digital Image ProcessingDocument50 pagesDigital Image ProcessingSibgha IsrarNo ratings yet
- Computer Graphics and VisualizationDocument77 pagesComputer Graphics and VisualizationMohan H G SantyNo ratings yet
- Medicion de Una CiudadDocument11 pagesMedicion de Una CiudadJorge de la CruzNo ratings yet
- CH2 GRAP LecturDocument48 pagesCH2 GRAP LecturMiskir BeNo ratings yet
- Computer Vision Lecture Notes AllDocument18 pagesComputer Vision Lecture Notes Allvijrj29No ratings yet
- Two-Dimensional Wavelets: ECE 802 Spring 2010Document61 pagesTwo-Dimensional Wavelets: ECE 802 Spring 2010Anand KarthikNo ratings yet
- 3D Scanning PDFDocument18 pages3D Scanning PDFMoiz AamirNo ratings yet
- Mod1 Notes From StudocsDocument18 pagesMod1 Notes From StudocsVidya BhartiNo ratings yet
- 13 PipelineDocument53 pages13 Pipelinenefoy77524No ratings yet
- LU 1 Digital Image Receptors 2022 Part 1Document42 pagesLU 1 Digital Image Receptors 2022 Part 1kgalalelounisaNo ratings yet
- Lecture 9 Image Enhancement - 1st - 2nd OrderDocument55 pagesLecture 9 Image Enhancement - 1st - 2nd OrderCh wahab GujjarNo ratings yet
- Https Myguru - Upsi.edu - My Documents 2021 Courses MRM3015 Material K03448 20211015113951 MRM3015 Week 7Document21 pagesHttps Myguru - Upsi.edu - My Documents 2021 Courses MRM3015 Material K03448 20211015113951 MRM3015 Week 7farah naziraNo ratings yet
- 7 THDocument16 pages7 THDumpala ChandanaNo ratings yet
- Resolution Adjustable 3D Scanner Based On Using Stereo CamerasDocument5 pagesResolution Adjustable 3D Scanner Based On Using Stereo Camerasverze1No ratings yet
- Digital Hand OutDocument14 pagesDigital Hand OutMariam SherifNo ratings yet
- SodaPDF-merged-Merging ResultDocument296 pagesSodaPDF-merged-Merging ResultShubham DhundaleNo ratings yet
- DIP Unit 1 (Intro, 2D - Sig+Sys, Convo, Transform)Document128 pagesDIP Unit 1 (Intro, 2D - Sig+Sys, Convo, Transform)Shubham DhundaleNo ratings yet
- SPARC Photogrammetry DraftDocument82 pagesSPARC Photogrammetry DraftNilay_emailNo ratings yet
- Mosaic IngDocument11 pagesMosaic IngdhananjayNo ratings yet
- Intermediate PresentationDocument2 pagesIntermediate PresentationNicoNo ratings yet
- Computer - Input Devices: - Following Are Some of The Important Input Devices Which Are Used in A ComputerDocument28 pagesComputer - Input Devices: - Following Are Some of The Important Input Devices Which Are Used in A Computerbhargavi rebbaNo ratings yet
- S22 VisionDocument33 pagesS22 VisionMarc KingstonNo ratings yet
- 3D Stereo CameraDocument7 pages3D Stereo CameraCharoensak CharayaphanNo ratings yet
- Humanoid Arm Manipulation Using Binocular Vision: Project ReviewDocument42 pagesHumanoid Arm Manipulation Using Binocular Vision: Project ReviewLokesh KalyanarajNo ratings yet
- Machine Vision3Document23 pagesMachine Vision3diiiiipsNo ratings yet
- Introduction On Photogrammetry Paul R WolfDocument33 pagesIntroduction On Photogrammetry Paul R Wolfadnan yusufNo ratings yet
- Optical Microscopy and Coordinate Measuring MachineDocument61 pagesOptical Microscopy and Coordinate Measuring Machinesangeet khuleNo ratings yet
- CalibrationDocument10 pagesCalibrationAyesha HussainNo ratings yet
- AmalaDocument16 pagesAmalaAmala AmmuNo ratings yet
- Image Sensors: Unit 5Document14 pagesImage Sensors: Unit 5laka singhNo ratings yet
- Radiometry of Image Forma0on: Jitendra MalikDocument14 pagesRadiometry of Image Forma0on: Jitendra MalikElisée Ndjabu DHNo ratings yet
- Raghu - B.Tech Project-65Document1 pageRaghu - B.Tech Project-65Raghu RamanNo ratings yet
- 1N4001, 1N4002, 1N4003, 1N4004, 1N4005, 1N4006, 1N4007: Vishay General SemiconductorDocument5 pages1N4001, 1N4002, 1N4003, 1N4004, 1N4005, 1N4006, 1N4007: Vishay General SemiconductorTanmaya Tapaswini TripathyNo ratings yet
- IE - Voltage RegulatorDocument46 pagesIE - Voltage RegulatorMa. Nancy CutinNo ratings yet
- 1N4148 (Do-35) 1N4148. 1N4148 1N4148 A0Document6 pages1N4148 (Do-35) 1N4148. 1N4148 1N4148 A0Raghu RamanNo ratings yet
- Raghu - B.Tech Project-64Document1 pageRaghu - B.Tech Project-64Raghu RamanNo ratings yet
- ds28002 83776Document4 pagesds28002 83776alareeqiNo ratings yet
- Raghu - B.Tech Project-10 PDFDocument1 pageRaghu - B.Tech Project-10 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-59 PDFDocument1 pageRaghu - B.Tech Project-59 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-63 PDFDocument1 pageRaghu - B.Tech Project-63 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-57Document1 pageRaghu - B.Tech Project-57Raghu RamanNo ratings yet
- Raghu - B.Tech Project-60 PDFDocument1 pageRaghu - B.Tech Project-60 PDFRaghu RamanNo ratings yet
- 6.3.3 Explanation of The Program On EVDocument1 page6.3.3 Explanation of The Program On EVRaghu RamanNo ratings yet
- Raghu - B.Tech Project-61 PDFDocument1 pageRaghu - B.Tech Project-61 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-58 PDFDocument1 pageRaghu - B.Tech Project-58 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-55Document1 pageRaghu - B.Tech Project-55Raghu RamanNo ratings yet
- Raghu - B.Tech Project-9 PDFDocument1 pageRaghu - B.Tech Project-9 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-6 PDFDocument1 pageRaghu - B.Tech Project-6 PDFRaghu RamanNo ratings yet
- 6.5 Gobetwino: Arduino Communicating With Excel: Figure 21: Gobetwino Working ExplanationDocument1 page6.5 Gobetwino: Arduino Communicating With Excel: Figure 21: Gobetwino Working ExplanationRaghu RamanNo ratings yet
- Raghu - B.Tech Project-58 PDFDocument1 pageRaghu - B.Tech Project-58 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-7 PDFDocument1 pageRaghu - B.Tech Project-7 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-56 PDFDocument1 pageRaghu - B.Tech Project-56 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-53Document1 pageRaghu - B.Tech Project-53Raghu RamanNo ratings yet
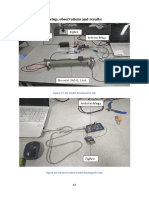
- 6.4 Experimental Setup, Observations and Results:: Figure 17: EV Model Developed in LabDocument1 page6.4 Experimental Setup, Observations and Results:: Figure 17: EV Model Developed in LabRaghu RamanNo ratings yet
- Raghu - B.Tech Project-8 PDFDocument1 pageRaghu - B.Tech Project-8 PDFRaghu RamanNo ratings yet
- Raghu - B.Tech Project-57Document1 pageRaghu - B.Tech Project-57Raghu RamanNo ratings yet
- Raghu - B.Tech Project-49Document1 pageRaghu - B.Tech Project-49Raghu RamanNo ratings yet
- Figure 16: Control Station Program (Flowchart)Document1 pageFigure 16: Control Station Program (Flowchart)Raghu RamanNo ratings yet
- Raghu - B.Tech Project-48 PDFDocument1 pageRaghu - B.Tech Project-48 PDFRaghu RamanNo ratings yet
- 6.2.3 Interfacing The Zigbee Transceivers With The ArduinoDocument1 page6.2.3 Interfacing The Zigbee Transceivers With The ArduinoRaghu RamanNo ratings yet
- Figure 13: Block Diagram Representing The Two Way Communication Between The EV and The Smart Grid ServerDocument1 pageFigure 13: Block Diagram Representing The Two Way Communication Between The EV and The Smart Grid ServerRaghu RamanNo ratings yet
- Forensic PhotographyDocument3 pagesForensic Photographygenelord opallaNo ratings yet
- Nikon SB-25Document73 pagesNikon SB-25joshhealdNo ratings yet
- 2d Art SyllabusDocument9 pages2d Art Syllabusapi-331571545No ratings yet
- General Workflow (Cheat Sheet)Document2 pagesGeneral Workflow (Cheat Sheet)Maria StfNo ratings yet
- Name - 8-Part Eye Exam ChecklistDocument2 pagesName - 8-Part Eye Exam Checklistrubie ann tillor100% (1)
- Chroma Sub Sampling NotationDocument3 pagesChroma Sub Sampling Notationdazecheru871No ratings yet
- Instant Download Macroeconomics 4th Edition Hubbard Test Bank PDF Full ChapterDocument32 pagesInstant Download Macroeconomics 4th Edition Hubbard Test Bank PDF Full ChapterHowardZunigaxgqt100% (6)
- D 1535 - 97 Rde1mzutotc - PDFDocument38 pagesD 1535 - 97 Rde1mzutotc - PDFCharlie DukeNo ratings yet
- Technical Recommendation Cognex IS2000 ENDocument6 pagesTechnical Recommendation Cognex IS2000 ENJose Luis PalmerosNo ratings yet
- Demographic and Clinical Profile of Ocular Chemical Injuries in The Pediatric Age Group PDFDocument4 pagesDemographic and Clinical Profile of Ocular Chemical Injuries in The Pediatric Age Group PDF-Yohanes Firmansyah-No ratings yet
- Performance Analysis of Ann Based Ycbcr Skin Detection AlgorithmDocument7 pagesPerformance Analysis of Ann Based Ycbcr Skin Detection AlgorithmshahadNo ratings yet
- General Physics: Activity 4 and 5Document40 pagesGeneral Physics: Activity 4 and 5Jessica Anne MoralesNo ratings yet
- Development of A Retinal Image Segmentation Algorithm For The Identifying Prevalence Markers of Diabetic Retinopathy Using A Neural NetworkDocument11 pagesDevelopment of A Retinal Image Segmentation Algorithm For The Identifying Prevalence Markers of Diabetic Retinopathy Using A Neural NetworkInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- TLE 8 - Handicraft Production Lesson 2: Elements of Design: Information SectionDocument9 pagesTLE 8 - Handicraft Production Lesson 2: Elements of Design: Information SectionMarist ChefNo ratings yet
- Keating Cinematography Definition 2008 in DornsbachDocument5 pagesKeating Cinematography Definition 2008 in DornsbachmentamentaNo ratings yet
- Retinal DetachmentDocument21 pagesRetinal DetachmentRose O'SullivanNo ratings yet
- Gravure Article PDFDocument9 pagesGravure Article PDFsomeOneNo ratings yet
- Referencias Colores 2020Document6 pagesReferencias Colores 2020CURRO LOPEZ TATTOONo ratings yet
- Polaroid t737 ManualDocument58 pagesPolaroid t737 ManualMariana Ruiz SanchezNo ratings yet
- Teacher Day PPT: Presentation PowerpointDocument52 pagesTeacher Day PPT: Presentation PowerpointLimberg ArhuataNo ratings yet
- A Short History of Color Theory: Rune MadsenDocument34 pagesA Short History of Color Theory: Rune MadsenAlberto Adrián SchianoNo ratings yet
- CO PY: Shutter ButtonDocument1 pageCO PY: Shutter ButtonSonora147No ratings yet
- Filem Dan Media DigitalDocument26 pagesFilem Dan Media DigitalNur Aishah SazaliNo ratings yet
- Physical ExaminationDocument30 pagesPhysical ExaminationAbdul Azis G. CamidNo ratings yet
- Klasifikasi Objek Berdasarkan Warna, Bentuk Dan Dimensi: Budi Sugandi, Aprianto, Riwan Doni, Dan Dwi Ayu ImardiyantiDocument10 pagesKlasifikasi Objek Berdasarkan Warna, Bentuk Dan Dimensi: Budi Sugandi, Aprianto, Riwan Doni, Dan Dwi Ayu Imardiyantibayu rahmatNo ratings yet
- RLM Paint Compaison ValejoDocument30 pagesRLM Paint Compaison ValejoMuaz0% (1)
- Carta ColorgildanDocument2 pagesCarta Colorgildanpistolo80No ratings yet