You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- AlphaGo Mastering The Game of Go With Deep Neural Networks and Tree SearchDocument273 pagesAlphaGo Mastering The Game of Go With Deep Neural Networks and Tree Searchbaboonijj100% (1)
- Electrical Engineering FormulasDocument15 pagesElectrical Engineering Formulasajayyadav19100% (4)
- Modern Control Systems 8th Edition PDFDocument9 pagesModern Control Systems 8th Edition PDFmohmmad shouqataliNo ratings yet
- TQM & Quality Presentation For Operations ManagementDocument23 pagesTQM & Quality Presentation For Operations ManagementIsuru Wijewardene100% (1)
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- Use of RX Diagram in Relaying-GEDocument26 pagesUse of RX Diagram in Relaying-GES Naved Masood100% (2)
- Unified Real-Time Object DetectionDocument36 pagesUnified Real-Time Object Detectionvrashikesh patilNo ratings yet
- 6DOF Robot ManipulatorDocument18 pages6DOF Robot ManipulatorKarthik DmNo ratings yet
- Expert Systems CharacteristicsDocument26 pagesExpert Systems CharacteristicsPawanLUMBA100% (3)
- Understanding the Ziegler–Nichols Tuning Method for PID Speed Control of a DC MotorDocument13 pagesUnderstanding the Ziegler–Nichols Tuning Method for PID Speed Control of a DC MotorSaran SelvanNo ratings yet
- Tema 3 Condicionament (AO)Document54 pagesTema 3 Condicionament (AO)Joel Díaz GarciaNo ratings yet
- Control Electrical System Transient EffectsDocument11 pagesControl Electrical System Transient EffectsJoseph NguyenNo ratings yet
- Smart Materials: D.S.S.Sudhakar FR - Conceicao Rodrigues College of Engineering BANDRA (W), MUMBAI-40050Document65 pagesSmart Materials: D.S.S.Sudhakar FR - Conceicao Rodrigues College of Engineering BANDRA (W), MUMBAI-40050DIPAK VINAYAK SHIRBHATENo ratings yet
- Design of Control Systems: Case StudiesDocument35 pagesDesign of Control Systems: Case StudiesRaf IsmailNo ratings yet
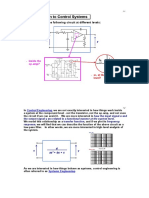
- Introduction To Control Systems: We Can Consider The Following Circuit at Different LevelsDocument19 pagesIntroduction To Control Systems: We Can Consider The Following Circuit at Different LevelsPeter ParkerNo ratings yet
- Modelling, Feedback Control Design and Simulation of An Industrial ApplicationDocument21 pagesModelling, Feedback Control Design and Simulation of An Industrial ApplicationjttatsumiNo ratings yet
- A MC56F8357 Based Permanent Magnet Synchronous Motor PMSM Servo SystemDocument5 pagesA MC56F8357 Based Permanent Magnet Synchronous Motor PMSM Servo Systemyanglei5159No ratings yet
- Steady State Error: Transient ResponseDocument6 pagesSteady State Error: Transient ResponseAshish AgarwalNo ratings yet
- 1 Continuous Controllers: Seadesuurus Hetke (Juhitav) V Artus JuhtsignalDocument1 page1 Continuous Controllers: Seadesuurus Hetke (Juhitav) V Artus JuhtsignalmsNo ratings yet
- PID Controller Modeling and ExperimentDocument5 pagesPID Controller Modeling and ExperimentYassine DjillaliNo ratings yet
- 061 MME 06 Cankaya AnkaraDocument10 pages061 MME 06 Cankaya Ankarapeter miauwNo ratings yet
- Proportional Integral AND Derivative ControllerDocument16 pagesProportional Integral AND Derivative ControllerAzhar AliNo ratings yet
- gupta2017Document6 pagesgupta2017lutterford18No ratings yet
- Elevator (Thang Máy)Document2 pagesElevator (Thang Máy)quân nguyễnNo ratings yet
- SPEED CONTROL SYSTEM OPTIMIZATIONDocument5 pagesSPEED CONTROL SYSTEM OPTIMIZATIONMuhd Ikram ShabryNo ratings yet
- 2018 EE305 New SolutionDocument25 pages2018 EE305 New SolutionJasa R ChoudharyNo ratings yet
- Me55 Control Engineering: Sharanabasava C PilliDocument12 pagesMe55 Control Engineering: Sharanabasava C PilliS C PilliNo ratings yet
- 1 en 79 Chapter AuthorDocument12 pages1 en 79 Chapter Authorsaid mahfoudNo ratings yet
- Characteristics of Ac Servomotor: Department of Electrical and Electronics EngineeringDocument47 pagesCharacteristics of Ac Servomotor: Department of Electrical and Electronics EngineeringpragatinareshNo ratings yet
- PID Controllers: System Dynamics and ControlDocument33 pagesPID Controllers: System Dynamics and ControlRuturaj BadalNo ratings yet
- Adaptive Control Design For The Buck-Boost Converter With Desired Pole/zero AssignmentDocument7 pagesAdaptive Control Design For The Buck-Boost Converter With Desired Pole/zero AssignmentIsrar Ul HaqNo ratings yet
- CI8 TP MCC Synthese V0Document5 pagesCI8 TP MCC Synthese V0Adahyl GarcezNo ratings yet
- Paper - 1980 - A New Technique For Preventing Control Windup - R HanusDocument6 pagesPaper - 1980 - A New Technique For Preventing Control Windup - R HanusSinggih Satrio WibowoNo ratings yet
- Power Converters Simulation Lab Manual - (2015-2016)Document41 pagesPower Converters Simulation Lab Manual - (2015-2016)Leela KrishnaNo ratings yet
- L2. Laplace SMD Modelling BlockdiagramDocument16 pagesL2. Laplace SMD Modelling Blockdiagramalex carterNo ratings yet
- Modelling and Simulation of DC Drive Using PI and PID ControllerDocument4 pagesModelling and Simulation of DC Drive Using PI and PID ControllerOTOMASYON PLCNo ratings yet
- Automatic Control Systems: Transfer FunctionsDocument23 pagesAutomatic Control Systems: Transfer FunctionsMU Len GANo ratings yet
- Control Tutorial Answers 1Document5 pagesControl Tutorial Answers 1aaroncete14No ratings yet
- Li 2018Document13 pagesLi 2018El ABBADI RedaNo ratings yet
- ELE2101 Mod 4 - Some Control System HardwareDocument54 pagesELE2101 Mod 4 - Some Control System HardwareRavneet kaurNo ratings yet
- ReactivePowerCompensation PDFDocument20 pagesReactivePowerCompensation PDFntrimurthuluNo ratings yet
- Lab DefinitionDocument10 pagesLab DefinitionPica DoceNo ratings yet
- High-performance intelligent DTC schemes for induction motorsDocument24 pagesHigh-performance intelligent DTC schemes for induction motorsНебојша МитровићNo ratings yet
- SCARA Robot KinematicsDocument5 pagesSCARA Robot KinematicsPrasanth Kurapati100% (3)
- Online Dynamic Parameter Estimation of Transformer Equivalent CircuitDocument5 pagesOnline Dynamic Parameter Estimation of Transformer Equivalent Circuitwilver condori chambiNo ratings yet
- Ac PDFDocument192 pagesAc PDFAnkan BhuniaNo ratings yet
- 10 - 1 PID ControllersDocument36 pages10 - 1 PID ControllersShilpya KurniasihNo ratings yet
- DC Motor Control PositionDocument8 pagesDC Motor Control Positionreynaldi adeNo ratings yet
- 2-DOF Helicopter Controlling by Pole-PlacementsDocument5 pages2-DOF Helicopter Controlling by Pole-PlacementsosdacavNo ratings yet
- ENEE3304 Op Amp and Their ApplicationsDocument73 pagesENEE3304 Op Amp and Their Applicationsعبدالرحمن عطاريNo ratings yet
- Using An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsDocument5 pagesUsing An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsAnuruddha WijerathneNo ratings yet
- Lec 2 PID ControlDocument8 pagesLec 2 PID ControlAep Kusman HeriyantoNo ratings yet
- EE352L Laboratory Experiment N # 6 Pre-LabDocument2 pagesEE352L Laboratory Experiment N # 6 Pre-LabYassine DjillaliNo ratings yet
- 4 Direct Torque Control of Induction Motor Using SimulinkDocument6 pages4 Direct Torque Control of Induction Motor Using Simulinkapi-19508046No ratings yet
- Psa Unit 1Document32 pagesPsa Unit 1Aish KrishNo ratings yet
- Motor 2Document49 pagesMotor 2api-247714257No ratings yet
- DocumentDocument4 pagesDocumentVikhar Z KhanNo ratings yet
- State Observers (p751)Document6 pagesState Observers (p751)Abdullah Abu LehyahNo ratings yet
- yang1991Document2 pagesyang1991dora guzmanNo ratings yet
- CEP Control System Sp2019V2Document3 pagesCEP Control System Sp2019V2Ahmed AkramNo ratings yet
- Simulation of Industrial Systems Lec 4 V1Document28 pagesSimulation of Industrial Systems Lec 4 V1Abdulrahman AliNo ratings yet
- CS Lab ManualDocument28 pagesCS Lab Manualkcop111No ratings yet
- The Operational Amplifier in CommutationDocument6 pagesThe Operational Amplifier in CommutationJugurthaHadjarNo ratings yet
- 08 InductionDocument83 pages08 Inductiongodspower brunoNo ratings yet
- Machine Learning Approach for Threat Hunting InternshipDocument22 pagesMachine Learning Approach for Threat Hunting InternshipEngr. Naveed MazharNo ratings yet
- A Secured Botnet Prevention Mechanism For HTTP Flooding Based DDoS AttackDocument5 pagesA Secured Botnet Prevention Mechanism For HTTP Flooding Based DDoS AttackEngr. Naveed MazharNo ratings yet
- Jamaneurology Diener 2023 RV 220007 1677854360.36406Document12 pagesJamaneurology Diener 2023 RV 220007 1677854360.36406Engr. Naveed Mazhar100% (1)
- Chap5b - Routh Stability Analysis - ELE353 - Spr21Document25 pagesChap5b - Routh Stability Analysis - ELE353 - Spr21Engr. Naveed MazharNo ratings yet
- 1 s2.0 S1544612321004025 MainDocument8 pages1 s2.0 S1544612321004025 MainEngr. Naveed MazharNo ratings yet
- 4 Your Design Case StudyDocument9 pages4 Your Design Case StudyEngr. Naveed MazharNo ratings yet
- Lec#1Document24 pagesLec#1Engr. Naveed MazharNo ratings yet
- 1 s2.0 S1059056022000685 MainDocument16 pages1 s2.0 S1059056022000685 MainEngr. Naveed MazharNo ratings yet
- 4 Your Design Case StudyDocument9 pages4 Your Design Case StudyEngr. Naveed MazharNo ratings yet
- Evaluation of The Innovative Value Proposition For The Rail Freight Transport: An Integrated Dematel-Anp ApproachDocument27 pagesEvaluation of The Innovative Value Proposition For The Rail Freight Transport: An Integrated Dematel-Anp ApproachEngr. Naveed MazharNo ratings yet
- 10 Further Investigation and More On Final ReportDocument26 pages10 Further Investigation and More On Final ReportEngr. Naveed MazharNo ratings yet
- Sliding Mode ControlDocument23 pagesSliding Mode ControlEngr. Naveed MazharNo ratings yet
- State Space Equations - Pole Assignment by State Feedback - Observer DesignDocument27 pagesState Space Equations - Pole Assignment by State Feedback - Observer DesignEngr. Naveed MazharNo ratings yet
- Chap5a Stability Analysis - ELE353 - Spr21Document4 pagesChap5a Stability Analysis - ELE353 - Spr21Engr. Naveed MazharNo ratings yet
- Chap4a - Steady State Errors - ELE353 - Spr21Document23 pagesChap4a - Steady State Errors - ELE353 - Spr21Engr. Naveed MazharNo ratings yet
- 5 PID Controller DesignDocument24 pages5 PID Controller DesignEngr. Naveed MazharNo ratings yet
- 6 Digital Controller DesignDocument23 pages6 Digital Controller DesignEngr. Naveed MazharNo ratings yet
- ListDocument2 pagesListEngr. Naveed MazharNo ratings yet
- Fault Tolerant Flight Control Using Sliding Modes and Subspace Identification-Based Predictive ControlDocument21 pagesFault Tolerant Flight Control Using Sliding Modes and Subspace Identification-Based Predictive ControlEngr. Naveed MazharNo ratings yet
- Wheel Slip Control For The Electric Vehicle With IDocument9 pagesWheel Slip Control For The Electric Vehicle With IEngr. Naveed MazharNo ratings yet
- MATLAB BER Simulation of SC, MRC & TC for 1, 2 & 4 Rx AntennasDocument5 pagesMATLAB BER Simulation of SC, MRC & TC for 1, 2 & 4 Rx AntennasEngr. Naveed MazharNo ratings yet
- Drive Calculator - DCbaseDocument1 pageDrive Calculator - DCbaseEngr. Naveed MazharNo ratings yet
- Lec03 MotorControlDocument45 pagesLec03 MotorControlEngr. Naveed MazharNo ratings yet
- Outdated Example For Previous Version of Supplied SchematicDocument2 pagesOutdated Example For Previous Version of Supplied SchematicEngr. Naveed MazharNo ratings yet
- GK McqsDocument3 pagesGK McqsEngr. Naveed MazharNo ratings yet
- Kowloon Tong, Hong Kong (2015.10.Document6 pagesKowloon Tong, Hong Kong (2015.10.Engr. Naveed MazharNo ratings yet
- Kowloon Tong, Hong Kong (2015.10.Document6 pagesKowloon Tong, Hong Kong (2015.10.Engr. Naveed MazharNo ratings yet
- List of Designated Branches HBLDocument1 pageList of Designated Branches HBLEngr. Naveed MazharNo ratings yet
- For (0.1,0.2,0.4,0.6,0.8,1) The ARL Chart Is As FollowsDocument5 pagesFor (0.1,0.2,0.4,0.6,0.8,1) The ARL Chart Is As FollowsEngr. Naveed MazharNo ratings yet
- Rnav (RNP) Z Rwy 6: 606 650 12007 Birmingham-Shuttlesworth IntlDocument6 pagesRnav (RNP) Z Rwy 6: 606 650 12007 Birmingham-Shuttlesworth IntlCraigNo ratings yet
- ZOE EX-113.1cross Reference 22000 HACCPDocument2 pagesZOE EX-113.1cross Reference 22000 HACCPSarfraz EPIC ConsultingNo ratings yet
- Sentiment Analysis of Movie Reviews using ML TechniquesDocument6 pagesSentiment Analysis of Movie Reviews using ML Techniquesrojey79875No ratings yet
- Exploring Adversarial Training For Out-of-Distribution DetectionDocument6 pagesExploring Adversarial Training For Out-of-Distribution DetectionjajabinksNo ratings yet
- How everyday products can improve usability and conceptual modelingDocument6 pagesHow everyday products can improve usability and conceptual modelingMuhammad Arsalan KhanNo ratings yet
- Reading Comprehension Nov 22, 2023Document6 pagesReading Comprehension Nov 22, 2023Muhammad Ismail AhmedNo ratings yet
- Designing Collaborative Systems: A Practical Guide To EthnographyDocument192 pagesDesigning Collaborative Systems: A Practical Guide To EthnographyJ.C.VNo ratings yet
- What Is Test Design TechniqueDocument5 pagesWhat Is Test Design TechniqueYellaReddy TarigopulaNo ratings yet
- RNN Neural NetworkDocument23 pagesRNN Neural NetworkNusrat UllahNo ratings yet
- Ece-IV-control Systems (10es43) - Question PaperDocument12 pagesEce-IV-control Systems (10es43) - Question PaperAbdul AzeezNo ratings yet
- Automatic Control System and Control LoopsDocument60 pagesAutomatic Control System and Control Loopsmoovendan pNo ratings yet
- Managerial Support SystemsDocument55 pagesManagerial Support SystemsKunwar Mahipal Singh KheecheeNo ratings yet
- Workflow Patterns Using BizAgi Process ModelerDocument51 pagesWorkflow Patterns Using BizAgi Process ModelerSandru GheorgheNo ratings yet
- Transfer Learning Approach For Splicing and Copy-Move Image Tampering DetectionDocument6 pagesTransfer Learning Approach For Splicing and Copy-Move Image Tampering DetectionLABIDNo ratings yet
- Closed-Loop Temperature Control of An Electrical Heater: Experiment 6Document9 pagesClosed-Loop Temperature Control of An Electrical Heater: Experiment 6Trần Quốc TuấnNo ratings yet
- Artificial IntelligenceDocument14 pagesArtificial IntelligenceChaima BelhediNo ratings yet
- Pega - Discussion QuestionsDocument9 pagesPega - Discussion QuestionsvelcoiraptorNo ratings yet
- Evolutionary Model: Spiral ModelDocument8 pagesEvolutionary Model: Spiral ModelRohit GaikwadNo ratings yet
- Discourse Analysis ObjectiveDocument73 pagesDiscourse Analysis ObjectiveAmin ChaudharyNo ratings yet
- Social Mobilization and Networking Unit 03C: Division of General Trias CityDocument3 pagesSocial Mobilization and Networking Unit 03C: Division of General Trias CityJofit Dayoc100% (1)
- Lect - 4 - 5 - 6 - Agile MethodsDocument44 pagesLect - 4 - 5 - 6 - Agile MethodsBushra HamidNo ratings yet
- Bcs Database - Complete Reference 2022Document109 pagesBcs Database - Complete Reference 2022NuwanthaNo ratings yet
- Defect Prevention TechniquesDocument229 pagesDefect Prevention TechniquesZarko AcimovicNo ratings yet
- Plant Disease DetectionDocument7 pagesPlant Disease Detectionvinay PonugotiNo ratings yet