You might also like
- Modelling and Investigations of Electrohydraulic Servo Valve With Piezo ElementDocument8 pagesModelling and Investigations of Electrohydraulic Servo Valve With Piezo Elementleena175No ratings yet
- K-Notes Manual for Quick RevisionDocument33 pagesK-Notes Manual for Quick RevisionNitin MauryaNo ratings yet
- Modeling and Simulation of A Series Resonant InverterDocument6 pagesModeling and Simulation of A Series Resonant InverterkaaisNo ratings yet
- PROYECTO FINAL ELECTROMECANICO InglesDocument5 pagesPROYECTO FINAL ELECTROMECANICO InglesMARIA DEL MAR PEÑA CUERONo ratings yet
- MEC 401 Advances Robotics Lecture 3 Mathematical ModelingDocument76 pagesMEC 401 Advances Robotics Lecture 3 Mathematical ModelingAkashNo ratings yet
- Parameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentDocument6 pagesParameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentVoet ZoekerNo ratings yet
- Lecture 6Document8 pagesLecture 6ArYanChoudhAryNo ratings yet
- Ems ch9 NTDocument19 pagesEms ch9 NTPurna YalamanchiliNo ratings yet
- Using The Green's Function Method To Analyse The Response of An Infinite Wire On Visco-Elastic Foundationn N Visco-ElasticDocument4 pagesUsing The Green's Function Method To Analyse The Response of An Infinite Wire On Visco-Elastic Foundationn N Visco-ElasticTraian MaziluNo ratings yet
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocument12 pagesPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifNo ratings yet
- Operation Characteristics Improvement of Linear Synchronous Motor With Half-Wave Rectified Self ExcitationDocument4 pagesOperation Characteristics Improvement of Linear Synchronous Motor With Half-Wave Rectified Self ExcitationHuong ThaoNo ratings yet
- Control Electrical System Transient EffectsDocument11 pagesControl Electrical System Transient EffectsJoseph NguyenNo ratings yet
- DC Motor Control PositionDocument8 pagesDC Motor Control Positionreynaldi adeNo ratings yet
- Furrier N A Chu Ky1Document4 pagesFurrier N A Chu Ky1Huỳnh NguyễnNo ratings yet
- Analysis of Electrical Machines BankDocument66 pagesAnalysis of Electrical Machines BankChilambarasan MadhappanNo ratings yet
- Lecture 2 - IDocument17 pagesLecture 2 - Igks5kc8bhdNo ratings yet
- Generator - Motor OperationsDocument5 pagesGenerator - Motor OperationsAnimesh PariharNo ratings yet
- Single Conductor DC Generator and Motor OperationsDocument6 pagesSingle Conductor DC Generator and Motor OperationsBT21EE017 Gulshan RajNo ratings yet
- Sinusoidal Response of Series Circuits - GATE Study Material in PDFDocument11 pagesSinusoidal Response of Series Circuits - GATE Study Material in PDFSupriya Santre100% (1)
- Lec01 1Document63 pagesLec01 1awabnasirahmednasirNo ratings yet
- ECE 303 - Transmission Lines & Wave EquationDocument209 pagesECE 303 - Transmission Lines & Wave EquationpcjabberNo ratings yet
- Modelling and Simulation of DC Drive Using PI and PID ControllerDocument4 pagesModelling and Simulation of DC Drive Using PI and PID ControllerOTOMASYON PLCNo ratings yet
- Stator Winding Induction Motor in The EMTPDocument8 pagesStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNo ratings yet
- Electromagnetic Field Analysis On Surge Response of 500 KV EHV Single Circuit Transmission Tower in Lightning Protection System Using Neural NetworksDocument4 pagesElectromagnetic Field Analysis On Surge Response of 500 KV EHV Single Circuit Transmission Tower in Lightning Protection System Using Neural NetworksFikri YansyahNo ratings yet
- 4 Direct Torque Control of Induction Motor Using SimulinkDocument6 pages4 Direct Torque Control of Induction Motor Using Simulinkapi-19508046No ratings yet
- Radial and Axial Short-Circuit Electrodynamic Forces of Three Phase Power TransformersDocument6 pagesRadial and Axial Short-Circuit Electrodynamic Forces of Three Phase Power TransformersBodoShowNo ratings yet
- Random Eletrical TextbookDocument3 pagesRandom Eletrical Textbookenoch tobeNo ratings yet
- Electronics 08 00221Document13 pagesElectronics 08 00221AMAN GOYALNo ratings yet
- GOENAGA APEC2013 Contactless Transfert Energy Piezoelectric ActuatorDocument9 pagesGOENAGA APEC2013 Contactless Transfert Energy Piezoelectric Actuatorjasta 11No ratings yet
- Ioc DT P 2004 22Document14 pagesIoc DT P 2004 22api-27199346No ratings yet
- Analysis of Darlington Pair in Distributed Amplifier Circuit: April 2015Document5 pagesAnalysis of Darlington Pair in Distributed Amplifier Circuit: April 2015mroocx1000No ratings yet
- Mechanical Systems: Translational RotationalDocument30 pagesMechanical Systems: Translational RotationalHussainNo ratings yet
- MEMB343 Final Exams 2019-2020-1 PDFDocument8 pagesMEMB343 Final Exams 2019-2020-1 PDFRubanraj RajendrenNo ratings yet
- Post-Fault Operation of Integrated OBCDocument11 pagesPost-Fault Operation of Integrated OBCmohamed yehiaNo ratings yet
- Rudolf Moers - UL InvestigationDocument40 pagesRudolf Moers - UL Investigationdisse_detiNo ratings yet
- PSD W07S01 Z Transform 3Document63 pagesPSD W07S01 Z Transform 3Jimmi NadapdapNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- Direct Wave Energy CoverterDocument4 pagesDirect Wave Energy Covertercaturhan007No ratings yet
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationDocument13 pagesReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationRajendra KumarNo ratings yet
- Wind Energy Conversion Systems KD7011 Project ReportDocument13 pagesWind Energy Conversion Systems KD7011 Project ReportMah EshNo ratings yet
- Bifurcation chaos camless EMVDocument14 pagesBifurcation chaos camless EMVRené Mboyo KouayepNo ratings yet
- EE3104 - L1 TL and Telegrapher EquationDocument29 pagesEE3104 - L1 TL and Telegrapher EquationDerek WangNo ratings yet
- HhjkaDocument22 pagesHhjkaAshenafi AbuyeNo ratings yet
- Optimal Control of DC Motor Using Performance Index of EnergyDocument5 pagesOptimal Control of DC Motor Using Performance Index of EnergyAlionNo ratings yet
- Đ Án Rơ Le DuyDocument44 pagesĐ Án Rơ Le Duynam phuongNo ratings yet
- 3 - 2b Transformer Energization - ModelingDocument7 pages3 - 2b Transformer Energization - ModelingNalex GeeNo ratings yet
- Analysis of Darlington Pair in Distributed Amplifier Circuit: April 2015Document5 pagesAnalysis of Darlington Pair in Distributed Amplifier Circuit: April 2015RachelNo ratings yet
- Chap - 02r RF and Microwave DesignDocument39 pagesChap - 02r RF and Microwave DesignPrince BoadiNo ratings yet
- Chap 2Document35 pagesChap 2Temesgen MekonenNo ratings yet
- The Mathematical Model of Inverter: Vasyl Tchaban, Dmytro PELESHKODocument3 pagesThe Mathematical Model of Inverter: Vasyl Tchaban, Dmytro PELESHKOShashi KumarNo ratings yet
- Small Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingDocument5 pagesSmall Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingEnimien AymenNo ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- Principles of Electromechanical Energy ConversionDocument21 pagesPrinciples of Electromechanical Energy ConversionJehovah CoelhoNo ratings yet
- Chapter 5Document53 pagesChapter 5Sherkhan3No ratings yet
- Performance Improvement of The Induction Motor Drive by Using Robust ControllerDocument6 pagesPerformance Improvement of The Induction Motor Drive by Using Robust Controlleramir amirNo ratings yet
- Application of FACTS Devices For Damping of Power System OscillationsDocument6 pagesApplication of FACTS Devices For Damping of Power System OscillationsFelix GamarraNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- New File ListDocument2 pagesNew File ListDIPAK VINAYAK SHIRBHATENo ratings yet
- Educational Multimedia On Hydraulics and PneumaticsDocument89 pagesEducational Multimedia On Hydraulics and PneumaticsDIPAK VINAYAK SHIRBHATENo ratings yet
- Aahan's BirthdayDocument22 pagesAahan's BirthdayDIPAK VINAYAK SHIRBHATENo ratings yet
- Dipak Vinayak Shirbhate VSRDIJCSIT 3479 Research Communication June 2014Document4 pagesDipak Vinayak Shirbhate VSRDIJCSIT 3479 Research Communication June 2014DIPAK VINAYAK SHIRBHATENo ratings yet
- Dipak Vinayak Shirbhate VSRDIJMCAPE 3631 Set PPRDocument6 pagesDipak Vinayak Shirbhate VSRDIJMCAPE 3631 Set PPRDIPAK VINAYAK SHIRBHATENo ratings yet
- Girls Hostel FormDocument1 pageGirls Hostel FormDIPAK VINAYAK SHIRBHATENo ratings yet
- Kaizan Presentation 11092012Document12 pagesKaizan Presentation 11092012DIPAK VINAYAK SHIRBHATENo ratings yet
- 2 Dipak Vinayak Shirbhate VSRDIJMCAPE 3631 Research Paper 4 8 August 2014Document8 pages2 Dipak Vinayak Shirbhate VSRDIJMCAPE 3631 Research Paper 4 8 August 2014DIPAK VINAYAK SHIRBHATENo ratings yet
- Boys Hostel FormDocument1 pageBoys Hostel FormDIPAK VINAYAK SHIRBHATE100% (1)
- Quality Circles For Vikramshila StudentsDocument22 pagesQuality Circles For Vikramshila StudentsDIPAK VINAYAK SHIRBHATENo ratings yet
- Kirti Polytechnic Prospectus Part ADocument5 pagesKirti Polytechnic Prospectus Part ADIPAK VINAYAK SHIRBHATENo ratings yet
- Vikramshila Polytechnic DarapurDocument1 pageVikramshila Polytechnic DarapurDIPAK VINAYAK SHIRBHATENo ratings yet
- Salary Slip - May 2014Document5 pagesSalary Slip - May 2014DIPAK VINAYAK SHIRBHATENo ratings yet
- Quality Circle A Case Study: Prof. D.V. Shirbhate Principal, Vikramshila Polytechnic DarapurDocument34 pagesQuality Circle A Case Study: Prof. D.V. Shirbhate Principal, Vikramshila Polytechnic DarapurDIPAK VINAYAK SHIRBHATENo ratings yet
- Domestic Water Heater PDFDocument39 pagesDomestic Water Heater PDFDIPAK VINAYAK SHIRBHATENo ratings yet
- Prospectus For 14-15Document44 pagesProspectus For 14-15DIPAK VINAYAK SHIRBHATENo ratings yet
- Domestic Water Heater PDFDocument39 pagesDomestic Water Heater PDFDIPAK VINAYAK SHIRBHATENo ratings yet
- Prospectus Data 2013-14Document12 pagesProspectus Data 2013-14DIPAK VINAYAK SHIRBHATENo ratings yet
- Ad Draft Approved by MsbteDocument1 pageAd Draft Approved by MsbteDIPAK VINAYAK SHIRBHATENo ratings yet
- Pramod Naik's Letter Director MsbteDocument1 pagePramod Naik's Letter Director MsbteDIPAK VINAYAK SHIRBHATENo ratings yet
- Importance of Diploma Education For Rural StudentsnnDocument55 pagesImportance of Diploma Education For Rural Studentsnnvspd2010No ratings yet
- Inplant TrainingDocument1 pageInplant TrainingDIPAK VINAYAK SHIRBHATENo ratings yet
- Prospectus For 13-14Document42 pagesProspectus For 13-14DIPAK VINAYAK SHIRBHATENo ratings yet
- Equivalence of Discipline Praposed Draft For Tech InstitutesDocument14 pagesEquivalence of Discipline Praposed Draft For Tech InstitutesDIPAK VINAYAK SHIRBHATENo ratings yet
- Performance ApprisalDocument12 pagesPerformance ApprisalDIPAK VINAYAK SHIRBHATENo ratings yet
- Classification of EnterprenuersDocument12 pagesClassification of EnterprenuersDIPAK VINAYAK SHIRBHATE100% (2)
- Pragati Ahawal, 2010 11Document9 pagesPragati Ahawal, 2010 11DIPAK VINAYAK SHIRBHATENo ratings yet
- Mobile Number of StudentsDocument4 pagesMobile Number of Studentsvspd2010No ratings yet
- Creativity & The Business IdeaDocument12 pagesCreativity & The Business IdeaDIPAK VINAYAK SHIRBHATENo ratings yet
- Vikramshila Poly Prospectus MarathiDocument29 pagesVikramshila Poly Prospectus MarathiDIPAK VINAYAK SHIRBHATENo ratings yet
- Control Valve Punch ListDocument3 pagesControl Valve Punch ListAnonymous zejWt17100% (1)
- Taut Wire Bandak MK 15 B PDFDocument26 pagesTaut Wire Bandak MK 15 B PDFGonzalo Villalobos Sanchez100% (1)
- Gas Laws Physics Lab ReportDocument10 pagesGas Laws Physics Lab Reportشاہ سعودNo ratings yet
- Power Generation System With Low Enthalpy Geothermal Source:Kalina CycleDocument9 pagesPower Generation System With Low Enthalpy Geothermal Source:Kalina CycleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Compatible Tubing Ts6Document28 pagesCompatible Tubing Ts6Defi Jodi Permana0% (1)
- Support Detail PDFDocument139 pagesSupport Detail PDFSumanNo ratings yet
- Liebherr Press Release Lixplore Bird's EyeDocument3 pagesLiebherr Press Release Lixplore Bird's EyeFrancisca TellesNo ratings yet
- 555 Audio Alarm ChartDocument4 pages555 Audio Alarm Chartnasty_beerNo ratings yet
- Land Rover Specific Diagnostic Trouble CodesDocument96 pagesLand Rover Specific Diagnostic Trouble CodesBRUCE QUARENo ratings yet
- Lab 3 - Hydrostatic Forces On Plane and Curved SurfacesDocument5 pagesLab 3 - Hydrostatic Forces On Plane and Curved SurfacesAlyssa Suzanne TafallaNo ratings yet
- DSK NyquistDocument19 pagesDSK NyquistRahmat Wahyu PratamaNo ratings yet
- Jasco Beam ManualDocument32 pagesJasco Beam Manualxyzhyn100% (2)
- 3 Mitsubishi Electric-VRF Technology-PUCT EEIP 1-2012Document35 pages3 Mitsubishi Electric-VRF Technology-PUCT EEIP 1-2012Lee ChorneyNo ratings yet
- Final Exam MA and MBDocument6 pagesFinal Exam MA and MBعبدالله حامد الرفاعيNo ratings yet
- Design of Gas Induction Reactors PDFDocument32 pagesDesign of Gas Induction Reactors PDFRavindra V. LakhapatiNo ratings yet
- Introduction To Quantum Physics NotesDocument9 pagesIntroduction To Quantum Physics NotesViraj BukitagarNo ratings yet
- KSB Pumps Co. EtnDocument16 pagesKSB Pumps Co. EtnHuzaifa Khan0% (1)
- Marine Engine Application and Installation Guide: - Boat PerformanceDocument13 pagesMarine Engine Application and Installation Guide: - Boat Performancefernando hutnikNo ratings yet
- UK Datasheet (Lug)Document18 pagesUK Datasheet (Lug)Ahmer AliNo ratings yet
- Questions Cessna 525Document42 pagesQuestions Cessna 525Alan Mara100% (2)
- Air Compressor 1 PDFDocument48 pagesAir Compressor 1 PDFDanielNo ratings yet
- Creep of Rock Core Specimens in Triaxial Compression at Ambient or Elevated TemperturesDocument6 pagesCreep of Rock Core Specimens in Triaxial Compression at Ambient or Elevated TemperturescamilleleleNo ratings yet
- Chaypy V NotchDocument5 pagesChaypy V NotchGherNo ratings yet
- Dana T2000 6 Speeds Long Drop Service ManualDocument209 pagesDana T2000 6 Speeds Long Drop Service Manualjccla100% (7)
- HSPTA Malappuram Physics Question Bank Ch 1&2-Physical World, Units & Measurement (1)Document10 pagesHSPTA Malappuram Physics Question Bank Ch 1&2-Physical World, Units & Measurement (1)arunkrishna1120No ratings yet
- Tare A 1Document2 pagesTare A 1Francisco Celestino Guajardo0% (1)
- Peek Design PrinciplesDocument15 pagesPeek Design PrinciplesSh.nasirpurNo ratings yet
- 4 Seismic Behavior of Underground Structures and Site ResponseDocument7 pages4 Seismic Behavior of Underground Structures and Site ResponseDennis NarteNo ratings yet
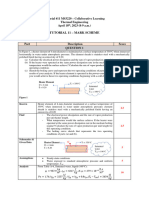
- Tutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)Document6 pagesTutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)i need documentsNo ratings yet
- ABB Medium Voltage SwitchgearDocument36 pagesABB Medium Voltage Switchgearap00100% (1)