You might also like
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Solution Manual For Data Communications and Networking by Behrouz ForouzanDocument18 pagesSolution Manual For Data Communications and Networking by Behrouz ForouzanKoya Srinath100% (1)
- Sistec Major Project Report Microcontroller Enabled Speaking System For Deaf and DumbDocument32 pagesSistec Major Project Report Microcontroller Enabled Speaking System For Deaf and Dumbukpandey2580% (5)
- Lab Test 1 Introduction Radar Rev 1 - QuestionDocument6 pagesLab Test 1 Introduction Radar Rev 1 - QuestionIzmar ZulkifliNo ratings yet
- Arduino TEA5767 FM Radio ReceiverDocument25 pagesArduino TEA5767 FM Radio ReceiverjovicaradNo ratings yet
- Defuzzification SumsDocument4 pagesDefuzzification SumsHarshali Y. Patil100% (1)
- RF Based Bus Stop Announcement SystemDocument43 pagesRF Based Bus Stop Announcement SystemSaravanan Viswakarma100% (1)
- Tricycle Side Wheel Energy Harvester: Research TitleDocument33 pagesTricycle Side Wheel Energy Harvester: Research TitleConan Grace AgasNo ratings yet
- Firefighter Robot: InstructablesDocument11 pagesFirefighter Robot: InstructablesQuirico Hechanova100% (1)
- Battery Charger: Rechargeable Battery Electric Current Voltage CurrentDocument12 pagesBattery Charger: Rechargeable Battery Electric Current Voltage CurrentRonaldNo ratings yet
- Lab 4 Stepper Motor PDFDocument10 pagesLab 4 Stepper Motor PDFIrfan HaiderNo ratings yet
- Absract For Reverse Parking Sensor CircuitDocument4 pagesAbsract For Reverse Parking Sensor CircuitKïshörë100% (1)
- Philadelphia: Faculty of Engineering and TechnologyDocument10 pagesPhiladelphia: Faculty of Engineering and TechnologyHani BanatNo ratings yet
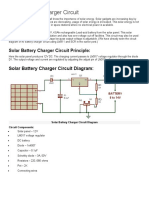
- Solar Battery Charger CircuitDocument3 pagesSolar Battery Charger CircuitL CHNo ratings yet
- Reverse CAR Parking: Aec J Component Review - 2Document16 pagesReverse CAR Parking: Aec J Component Review - 2kanthan100% (1)
- DC Bus ParallelingDocument20 pagesDC Bus ParallelingНебојша МитровићNo ratings yet
- 99.automatic Auditorium ControllingDocument3 pages99.automatic Auditorium ControllingDinesh DspNo ratings yet
- 84.vehicle Superintending System With Voice Feedback DocuDocument88 pages84.vehicle Superintending System With Voice Feedback DocuMoluguri KirankumarNo ratings yet
- Linux Based Speaking Medication Reminder ProjectDocument4 pagesLinux Based Speaking Medication Reminder ProjectEditor IJTSRDNo ratings yet
- Solar Powered Rover and Obstacle DetectorDocument22 pagesSolar Powered Rover and Obstacle DetectorAnjna SinhaNo ratings yet
- Project ReportDocument95 pagesProject ReportArunodayaprojectsNo ratings yet
- Service Manual RAINBOW 180E EnglishDocument54 pagesService Manual RAINBOW 180E EnglishJaroslaw BrzozowskiNo ratings yet
- Human Speed Detection ProjectDocument3 pagesHuman Speed Detection ProjectIJRASETPublications0% (1)
- Mebre ProposalDocument12 pagesMebre Proposalmere mezgebeNo ratings yet
- Multistage Coil Gun Project ProposalDocument8 pagesMultistage Coil Gun Project ProposalAbdullah ArifNo ratings yet
- Max DemandDocument11 pagesMax DemanddwarakeshNo ratings yet
- Design and Construction of Water in Fuel DetectorDocument60 pagesDesign and Construction of Water in Fuel DetectorNjitnumNo ratings yet
- Chapter 1-Literature Survey 1.1Document41 pagesChapter 1-Literature Survey 1.1dil17No ratings yet
- "Automatic Railway Crossing Gate Control ": A Project Report OnDocument80 pages"Automatic Railway Crossing Gate Control ": A Project Report Ondarshan_dharajiaNo ratings yet
- A Synopsis Report ON Speed Control of DC Motor Using Arduino Microcontroller Board and PWMDocument14 pagesA Synopsis Report ON Speed Control of DC Motor Using Arduino Microcontroller Board and PWMsaikumarNo ratings yet
- Hybrid EnergyDocument20 pagesHybrid Energyabcd_xyzxyzNo ratings yet
- Arduino Solar TrackerDocument46 pagesArduino Solar TrackerPhops Freal100% (1)
- INTERNDocument21 pagesINTERNSahil Shah100% (1)
- Welding Station Monitoring System Using Internet of Thing (Iot)Document12 pagesWelding Station Monitoring System Using Internet of Thing (Iot)Paras GuptaNo ratings yet
- Multiple Transformers Oil Temperature Monitoring With Automatic CircuitDocument25 pagesMultiple Transformers Oil Temperature Monitoring With Automatic CircuitPrem Narayan Singh100% (1)
- BE Descriptive Notes PDFDocument199 pagesBE Descriptive Notes PDFBOOMERaNG boomNo ratings yet
- 1 - Introduction To Proteus VSM (Part I) : LAB ObjectivesDocument16 pages1 - Introduction To Proteus VSM (Part I) : LAB ObjectivesNirmal Kumar Pandey100% (1)
- User Manual ESD30NDocument44 pagesUser Manual ESD30NLiborio SanchezNo ratings yet
- An Intelligent Line-Following Robot Project For Introductory Robot CoursesDocument7 pagesAn Intelligent Line-Following Robot Project For Introductory Robot CoursesAmla SingNo ratings yet
- Motion Sensor Light Switch Using Infrared TechnologyDocument34 pagesMotion Sensor Light Switch Using Infrared TechnologyChalo NdikoNo ratings yet
- Final Project Report of LabDocument7 pagesFinal Project Report of LabDuniya ANo ratings yet
- MEP Internship Training Report Main PageDocument40 pagesMEP Internship Training Report Main PageHhNo ratings yet
- BHB Red Sicam Ak EngDocument167 pagesBHB Red Sicam Ak EngPuneetNo ratings yet
- IP Experiment Manual V2.00Document184 pagesIP Experiment Manual V2.00tmohanrajkecNo ratings yet
- Title: Implementation OF Sr-Latches & Flip Flops Using Nand &nor Lab Worksheet #12Document3 pagesTitle: Implementation OF Sr-Latches & Flip Flops Using Nand &nor Lab Worksheet #12MUNEEB SHAHNo ratings yet
- Quectel Embedded GSM Antenna User Guide V1.2Document11 pagesQuectel Embedded GSM Antenna User Guide V1.2MaiDungNo ratings yet
- Device Load Monitor With Programmable Meter For Energy AuditDocument3 pagesDevice Load Monitor With Programmable Meter For Energy AuditMandeep G KashyapNo ratings yet
- Thesis Report FinalDocument25 pagesThesis Report FinalThanhha Nguyen100% (2)
- On "GSM BASED E-NOTICE BOARD"Document28 pagesOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Arduino Based Home Automation Using Android ApplicationDocument5 pagesArduino Based Home Automation Using Android ApplicationMihai BogdanNo ratings yet
- Microcontroller Based Vehicle Security SystemDocument67 pagesMicrocontroller Based Vehicle Security Systemlokesh_045No ratings yet
- Advanced Speed Control Techniques of Brushless DC MotorDocument17 pagesAdvanced Speed Control Techniques of Brushless DC Motorsrinupid100% (1)
- Thyristor Family PSDDocument18 pagesThyristor Family PSDHiren H. Patel100% (1)
- MS6155 SpecsDocument1 pageMS6155 SpecscoolgreenozNo ratings yet
- Sensor Based Accident Prevention System in Curving Ijariie10101Document8 pagesSensor Based Accident Prevention System in Curving Ijariie10101GnmNo ratings yet
- Electrical and Electronics Engineering Seminar Topic: Short Range FM Radio Station For College CampusDocument17 pagesElectrical and Electronics Engineering Seminar Topic: Short Range FM Radio Station For College CampusShubham Bodade100% (1)
- DSP Project ReportDocument14 pagesDSP Project ReportMuhammad RashidNo ratings yet
- Automatic Railway Gate ControlDocument22 pagesAutomatic Railway Gate ControlsriramNo ratings yet
- Term Paper Street LightDocument3 pagesTerm Paper Street Lightjigyasa BhardwajNo ratings yet
- Aplikasi Pengaturan Lampu Lalu Lintas Secara WirelDocument8 pagesAplikasi Pengaturan Lampu Lalu Lintas Secara WirelarieNo ratings yet
- KL-710 Conventional Temprature Detector PDFDocument1 pageKL-710 Conventional Temprature Detector PDFghenriquezNo ratings yet
- RT Series Manual v005Document44 pagesRT Series Manual v005Muhammed Abo-FandoodNo ratings yet
- PGDBA From MIT PuneDocument2 pagesPGDBA From MIT PuneMIT,PuneNo ratings yet
- SMPS FundamentalsDocument53 pagesSMPS FundamentalsRahul Gupta100% (2)
- BiometricsDocument10 pagesBiometricsKrishna Murthy PNo ratings yet
- Comparing 18650 Lithium Ion NMC Cells With 32650 Lifepo4 Cells - Which One Is Right For Your Application?Document9 pagesComparing 18650 Lithium Ion NMC Cells With 32650 Lifepo4 Cells - Which One Is Right For Your Application?Rommel Angeles PeronaNo ratings yet
- Community-Based Eco Activity: An Out-of-School Youth Environment Education ProgramDocument10 pagesCommunity-Based Eco Activity: An Out-of-School Youth Environment Education ProgramInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Phy12l E301Document5 pagesPhy12l E301Arvn Christian Santicruz FloresNo ratings yet
- Industrial Machines IiDocument26 pagesIndustrial Machines IiIsaac KimaruNo ratings yet
- Quality Assurance Measures For Procurement of Purchased PartsDocument26 pagesQuality Assurance Measures For Procurement of Purchased Partssakshi patilNo ratings yet
- Tata Teleservices LTDDocument19 pagesTata Teleservices LTDrajvarshaNo ratings yet
- 4401 SyllabusDocument1 page4401 SyllabusTony LeungNo ratings yet
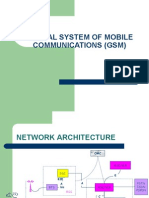
- GSMDocument38 pagesGSMapi-370641475% (8)
- Eclipse Ring Planning Guide - Any To AnyDocument8 pagesEclipse Ring Planning Guide - Any To AnyAnsar ShafiiNo ratings yet
- Denso Mitsubishi L200 Common Rail PDFDocument53 pagesDenso Mitsubishi L200 Common Rail PDFAlex Renne Chambi100% (8)
- Ppt-Nav1 - PrelimDocument174 pagesPpt-Nav1 - PrelimKayle Christian TaroyNo ratings yet
- Highlands FM: Jacqueline LawrenceeDocument14 pagesHighlands FM: Jacqueline LawrenceeLydia LaizaNo ratings yet
- IHS Markit - The Global Ultrasound MarketDocument2 pagesIHS Markit - The Global Ultrasound MarketwwtqfgtpNo ratings yet
- Linear Analysis and Effective Length MethodDocument4 pagesLinear Analysis and Effective Length MethodmnagasandeepNo ratings yet
- Filipino ThinkingDocument2 pagesFilipino ThinkingRheyven JuanNo ratings yet
- ISO 90012015checklist - tcm14 57745 PDFDocument25 pagesISO 90012015checklist - tcm14 57745 PDFDaniela Muñoz SaldiasNo ratings yet
- WESCAM MX-15-0503AA-SpecDocument2 pagesWESCAM MX-15-0503AA-SpecAIT FARIDNo ratings yet
- Schoolwide Plan Worksheet: School Name: Pioneer Elementary Principal Name: Brenda Lopresto School Planning TeamDocument10 pagesSchoolwide Plan Worksheet: School Name: Pioneer Elementary Principal Name: Brenda Lopresto School Planning TeamChauncey Mae TanNo ratings yet
- List of ROs Under VODocument74 pagesList of ROs Under VOvivek mishraNo ratings yet
- BAH Series 6000 Manguard - 113534-91Document40 pagesBAH Series 6000 Manguard - 113534-91AhmedNo ratings yet
- Using A Robotic Helicopter To Fuel Interest in and Augment The HumanDocument11 pagesUsing A Robotic Helicopter To Fuel Interest in and Augment The Human枪手瞎炳No ratings yet
- Assignment 1: InstructionsDocument6 pagesAssignment 1: InstructionsAsim MughalNo ratings yet
- Life Cycle Asset ManagementDocument1 pageLife Cycle Asset ManagementJuan EspinosaNo ratings yet
- Aec3414 Philosophy FinalDocument5 pagesAec3414 Philosophy Finalapi-532996380No ratings yet
- Bituminous Construction TypesDocument3 pagesBituminous Construction TypesSiya Fal DesaiNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)