You might also like
- Network Functions-R SinghDocument55 pagesNetwork Functions-R SinghPritam Deb RoyNo ratings yet
- Goals For Today: 2.004 Fall '07Document6 pagesGoals For Today: 2.004 Fall '07Lemdy AnwunaNo ratings yet
- Formula SheetDocument3 pagesFormula SheetArchie MarchieNo ratings yet
- Sinusoids and Phasors: Delta-To-Wye and Wye-To-Delta Conversions Phase Sifters. AC Bridges. Problem SolutionsDocument18 pagesSinusoids and Phasors: Delta-To-Wye and Wye-To-Delta Conversions Phase Sifters. AC Bridges. Problem SolutionsWESTLY JUCONo ratings yet
- Voltage Divider Transfer FunctionDocument8 pagesVoltage Divider Transfer FunctionMark ParralNo ratings yet
- Voltage Divider Transfer FunctionDocument8 pagesVoltage Divider Transfer FunctionMark ParralNo ratings yet
- Sensitivity Analysis of Synchronous Generators: S V Ee V Ze S Eve Ze V Ze S Ev Z E V Z E E E S Ev Z V ZDocument3 pagesSensitivity Analysis of Synchronous Generators: S V Ee V Ze S Eve Ze V Ze S Ev Z E V Z E E E S Ev Z V ZKevin RamonNo ratings yet
- Assignment 1 Model Answer 2010Document4 pagesAssignment 1 Model Answer 2010Lalantha Munasinghe ArachchiNo ratings yet
- Frequency Response: Key Concept: Small-Signal Models For Amplifiers Are Linear and ThereforeDocument10 pagesFrequency Response: Key Concept: Small-Signal Models For Amplifiers Are Linear and Thereforetareq omarNo ratings yet
- Flying WindmillDocument4 pagesFlying WindmillAbhi AbhilashNo ratings yet
- Elen E6316: Analog Systems in Vlsi: Nyquist-Rate: Flash AdcsDocument15 pagesElen E6316: Analog Systems in Vlsi: Nyquist-Rate: Flash AdcsWilson PenaNo ratings yet
- WINSEM2020-21 ECE2004 TH VL2020210502822 Reference Material I 19-Feb-2021 Terminated Lossless ArbitraryloadDocument9 pagesWINSEM2020-21 ECE2004 TH VL2020210502822 Reference Material I 19-Feb-2021 Terminated Lossless ArbitraryloadRaj GaneshNo ratings yet
- Lecture 5Document25 pagesLecture 5Ron JosephNo ratings yet
- AC Circuits: Fundamentals of Electric CircuitsDocument16 pagesAC Circuits: Fundamentals of Electric CircuitsHiếu Dương100% (1)
- FALLSEM2022-23 BECE205L TH VL2022230102515 Reference Material II 15-09-2022 Mismatched LoadDocument9 pagesFALLSEM2022-23 BECE205L TH VL2022230102515 Reference Material II 15-09-2022 Mismatched LoadShreyansh KumarNo ratings yet
- EE2023 Signals & Systems Revision Notes: 1 Circuit Elements and Their ModelsDocument15 pagesEE2023 Signals & Systems Revision Notes: 1 Circuit Elements and Their ModelsFarwaNo ratings yet
- Compensator BTechDocument25 pagesCompensator BTechAkash RoyNo ratings yet
- Electric Circuits ECSE-2010 ECSE 2010: Today and Next ClassesDocument5 pagesElectric Circuits ECSE-2010 ECSE 2010: Today and Next Classeschristian9082No ratings yet
- Microwave Engineering: Chapter 2.2: Reflection CoefficientDocument14 pagesMicrowave Engineering: Chapter 2.2: Reflection CoefficientLê NamNo ratings yet
- Cranking Up The Gain: Type 0 System (No Disturbance)Document8 pagesCranking Up The Gain: Type 0 System (No Disturbance)Priyan JeromeNo ratings yet
- Distance Protection Part 3Document93 pagesDistance Protection Part 3Homer Simp67% (3)
- Compensation Design From LinearDocument39 pagesCompensation Design From LinearTrung Nguyen ChiNo ratings yet
- CH 12Document108 pagesCH 12김여명No ratings yet
- Lecture One: Introduction To Power System Yoseph MekonnenDocument23 pagesLecture One: Introduction To Power System Yoseph MekonnenKalab TenadegNo ratings yet
- Module 6Document34 pagesModule 6Debasis ChandraNo ratings yet
- Espectroscopia de Impedancia Electroquimica (Eie)Document23 pagesEspectroscopia de Impedancia Electroquimica (Eie)Ronald BustamanteNo ratings yet
- ELL 100 Introduction To Electrical Engineering: Ecture RansformersDocument65 pagesELL 100 Introduction To Electrical Engineering: Ecture RansformersDagmawe ZewengelNo ratings yet
- Network Functions and S-Domain AnalysisDocument22 pagesNetwork Functions and S-Domain AnalysispowerdeadlifterNo ratings yet
- Ztransforms: AptepDocument11 pagesZtransforms: AptepveenaNo ratings yet
- S - Parameter Basics PDFDocument24 pagesS - Parameter Basics PDFHuzaifa AzamNo ratings yet
- Single Tuned CircuitsDocument6 pagesSingle Tuned CircuitsMansi Arpit NanavatiNo ratings yet
- Distance Protection TheoryDocument31 pagesDistance Protection TheoryDaniel Andres Bastardo NuñezNo ratings yet
- EE - 2005 - by WWW - LearnEngineering.inDocument42 pagesEE - 2005 - by WWW - LearnEngineering.inprathap kumarNo ratings yet
- Homework 2Document2 pagesHomework 2Houseman74No ratings yet
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDocument74 pagesChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsHoang ManhNo ratings yet
- RLC NotesDocument7 pagesRLC NotesgodcoderzzNo ratings yet
- 7 LogicStyle3Document59 pages7 LogicStyle3YeasminNo ratings yet
- Yn Ayn Ayn N BXN BXN N: Recursive FiltersDocument28 pagesYn Ayn Ayn N BXN BXN N: Recursive FiltersnikshithNo ratings yet
- Chapter 2 - Reduction of Multiple SystemDocument22 pagesChapter 2 - Reduction of Multiple SystemMustafa ManapNo ratings yet
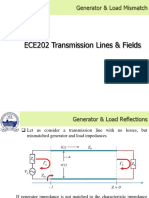
- ECE202 Transmission Lines & Fields: Generator & Load MismatchDocument7 pagesECE202 Transmission Lines & Fields: Generator & Load MismatchRaj GaneshNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersNikita ShakyaNo ratings yet
- TND351 DDocument23 pagesTND351 DmptejaNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersHarreniNo ratings yet
- 07-Impedance and AddmittanceDocument16 pages07-Impedance and AddmittanceAhmad Al-ShormanNo ratings yet
- ReactivePowerCompensation PDFDocument20 pagesReactivePowerCompensation PDFntrimurthuluNo ratings yet
- 9 IirDocument28 pages9 IirMekonen AberaNo ratings yet
- 12 6 CMPLX Impedance PDFDocument4 pages12 6 CMPLX Impedance PDFKhaled BazaNo ratings yet
- Lecture IN229 2021 03Document35 pagesLecture IN229 2021 03ealleti vikramNo ratings yet
- Adaptive Voltage PositioningDocument7 pagesAdaptive Voltage PositioningadolfNo ratings yet
- Lecture 4-Mathematical Modeling of Electrical SystemsDocument58 pagesLecture 4-Mathematical Modeling of Electrical SystemsNoor AhmedNo ratings yet
- Lecture 4-Mathematical Modeling of Electrical SystemsDocument58 pagesLecture 4-Mathematical Modeling of Electrical SystemsNoor Ahmed86% (7)
- Beta Ratio Effects: Skewed Inverters (Sutherland99) - If R UnskewedDocument1 pageBeta Ratio Effects: Skewed Inverters (Sutherland99) - If R UnskewedCarlos SaavedraNo ratings yet
- Two Port ParametersDocument18 pagesTwo Port ParametersNikhil VarmaNo ratings yet
- Ground Distance RelaysDocument78 pagesGround Distance Relaysardianto hamonanganNo ratings yet
- Analysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersDocument22 pagesAnalysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersAndrea FasatoNo ratings yet
- 1PH Half Bridge InverterDocument31 pages1PH Half Bridge InvertertintuvrNo ratings yet
- Finite Elements For Modeling Bridge ComponentsDocument83 pagesFinite Elements For Modeling Bridge ComponentsK KajeenthanNo ratings yet
- Exp No: 1 Load Test On DC Shunt MotorDocument7 pagesExp No: 1 Load Test On DC Shunt MotorjascnjNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Accessories Broc E14Document10 pagesAccessories Broc E14Александр ЕвсеевNo ratings yet
- (SM) M (2 3 4 5) OE 14 42HFN1 Q (Multi Outdoor) - EngDocument57 pages(SM) M (2 3 4 5) OE 14 42HFN1 Q (Multi Outdoor) - EngDee RajaNo ratings yet
- Fender SR 6300 SR 8500 Powered Mixer PDFDocument15 pagesFender SR 6300 SR 8500 Powered Mixer PDFJavier Castellanos BarrazaNo ratings yet
- MAGNUM MMS-1012 MMS-Series-Data-SheetDocument2 pagesMAGNUM MMS-1012 MMS-Series-Data-SheetA CermenoNo ratings yet
- Mini Audio AmplifierDocument32 pagesMini Audio AmplifierSanjivee Sachin83% (6)
- Chapter 5 PDFDocument20 pagesChapter 5 PDFJorge Miguel Barajas BustamanteNo ratings yet
- CS50.4 SMDocument20 pagesCS50.4 SM4131etasNo ratings yet
- Frenzel 2 NdedDocument41 pagesFrenzel 2 NdedRose Eden SarmientoNo ratings yet
- 23ISPROXSDocument104 pages23ISPROXSQuang Chánh NguyễnNo ratings yet
- Electronics Syllabus Plus Other InformationDocument10 pagesElectronics Syllabus Plus Other InformationCutry CarryNo ratings yet
- Lecture 2 Biomedical ElectronicsDocument9 pagesLecture 2 Biomedical ElectronicsnyashaalbertNo ratings yet
- Unit 4 FOCDocument26 pagesUnit 4 FOCNAGASWATHI NIDAMANURINo ratings yet
- TL072 Low Noise and TL082 General Purpose Dual Op Amps: New ProductDocument2 pagesTL072 Low Noise and TL082 General Purpose Dual Op Amps: New ProductAlejandro AGDvintageNo ratings yet
- (BJT) Electronic Circuits Handbook For Design and Application (Springer - U.tietze)Document43 pages(BJT) Electronic Circuits Handbook For Design and Application (Springer - U.tietze)ortimecNo ratings yet
- Questions On The Operational AmplifierDocument12 pagesQuestions On The Operational Amplifierkibrom atsbha50% (2)
- PROPRTIONAL PRESSURE REDUCING 3DREP and 3DREPE RE29184 PDFDocument12 pagesPROPRTIONAL PRESSURE REDUCING 3DREP and 3DREPE RE29184 PDFtiklitNo ratings yet
- Seismic Performance of 245 KV Current Transformer: September 2012Document7 pagesSeismic Performance of 245 KV Current Transformer: September 2012Farah Diba Pos-PosNo ratings yet
- Build An Analog VocoderDocument13 pagesBuild An Analog VocoderRichie ChicolNo ratings yet
- Intro Op AmpDocument44 pagesIntro Op AmpNimish PrabhakarNo ratings yet
- liedsignal: I!#Endlx KLNG@Document37 pagesliedsignal: I!#Endlx KLNG@locoboeingNo ratings yet
- Boonton CatalogDocument16 pagesBoonton CatalogSamuelGarciaNo ratings yet
- Meambobbo's Pod HD GuideDocument26 pagesMeambobbo's Pod HD GuidegodsoverheadNo ratings yet
- A Comparison of Frame Stability Analysis Methods in ANSI/AISC 360-05Document12 pagesA Comparison of Frame Stability Analysis Methods in ANSI/AISC 360-05MugamputhagamNo ratings yet
- UNIT-2 Signal Analyzers: AF Wave AnalyzerDocument15 pagesUNIT-2 Signal Analyzers: AF Wave Analyzersonuchary100% (1)
- Notifier FCPS 24S6 FCPS 24S8 Field Charger Power SupplyDocument44 pagesNotifier FCPS 24S6 FCPS 24S8 Field Charger Power SupplyvictorNo ratings yet
- MLAand MLACompact System User GuideDocument456 pagesMLAand MLACompact System User Guidepmacs10No ratings yet
- ch-3 OpampDocument12 pagesch-3 OpampS KumarNo ratings yet
- Pepprl Fuchs Barrier Switch AmpDocument4 pagesPepprl Fuchs Barrier Switch AmpShabeer CVNo ratings yet
- Sensor Nivel Hansen PDFDocument4 pagesSensor Nivel Hansen PDFpablo puñalNo ratings yet